


Abstract
Measuring the wind profile near a planet's surface provides a way to estimate friction velocity and the surface's aerodynamic roughness length, parameters key for understanding and predicting aeolian activity. In this study, we demonstrate the feasibility of measuring the wind profile using only the attitude of a small drone. Such an approach may be particularly advantageous in planetary exploration where instrument payload, data volume, and power are all limited. Indeed, estimates of Martian winds and the wind profile are likely already feasible with telemetry from Mars 2020 Ingenuity. Given the enormous influence of wind in energy and sediment redistribution on Mars, such measurements are critical to understanding aeolian processes and to constraining parameters used in geologic and climate models (such as dust lofting rates). Future work should explore how to expand on and improve the measurement approach discussed here and whether the already collected telemetry from Ingenuity might be used.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 4.0 licence. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
The demonstration of the Mars 2020 Ingenuity helicopter has opened the door for aerial exploration of other worlds. Not only do rotorcraft offer unprecedented mobility, they can also uniquely probe interactions within a world's atmosphere. Profiling volatiles, temperatures, and aerosols will constrain transport mechanisms and dynamics. Wind measurements will elucidate the operation of aeolian processes, which depend on aerodynamic surface interactions. For Mars especially, aeolian processes play crucial roles in shaping the surface and driving meteorology.
Even after decades of studies, the threshold conditions for dust and sand motion on Mars remain very poorly constrained. The key parameter for determining when dust and sand move is the friction velocity u⋆, defined as  , where τ is the wind shear and ρ is the atmospheric density. Although the appropriate thresholds depend on the exact type of motion considered, the friction velocity required to move dust or sand on Mars remains highly uncertain (Newman et al. 2022a). Thus, measurements of friction velocity during a grain movement episode on Mars would be especially informative.
, where τ is the wind shear and ρ is the atmospheric density. Although the appropriate thresholds depend on the exact type of motion considered, the friction velocity required to move dust or sand on Mars remains highly uncertain (Newman et al. 2022a). Thus, measurements of friction velocity during a grain movement episode on Mars would be especially informative.
Under stable atmospheric conditions, the friction velocity can be determined by fitting horizontal wind speed u as a function of altitude z using the "'law of the wall":

where κ is the Von Kármán constant (≈0.4) and z0 is the roughness scale, a parameter that depends on the spacing and shape of surface elements (Wieringa 1993). There has only been a single successful attempt to measure the near-surface wind profile on Mars (Sullivan et al. 2000) derived through windsock analysis with the Pathfinder rover from three heights of <1 m.
Drones provide a new way to measure wind profiles, and conducting numerous field and wind tunnel experiments, Meier et al. (2022) found that a multi-copter's tilt, while in fixed-point hover mode, provided an accurate proxy for the wind speed. Copters typically generate forward thrust by tilting into the direction of forward motion (instead of changing rotor pitch or rotation rate), and so, when instructed to hover in-place against a headwind, a copter tilts into the wind. Assuming a drone's unique aerodynamic response is known, the drone's attitude can therefore constrain wind speed without the need for additional instruments. Instructing a drone to hover in-place at several different altitudes consecutively, then, could provide a cheap, simple, and accurate method for determining wind profiles on Earth and elsewhere, analogous to the typical approach on Earth of erecting a large (∼10 m) tower bedight with several anemometers. In what follows, we describe a proof-of-concept experiment demonstrating the feasibility of this approach at a terrestrial field site and conclude with suggestions for future work.
2. Methods and Results
Depicted in Figure 1(a), the field experiments were conducted on Seal Beach CA, USA on 2022 June 9 at about 16:00 local time and lasted for about two hours. An onshore breeze held steady for the duration of the experiments, coming in from about 220° azimuth with an average speed of about 6 m s−1. The experimental set-up was about 20 m from the water's edge, giving an upwind fetch of open water ≫100 m. As a control on the drone-measured wind profile, four commercially available Kestrel 5500 Weather Meters, each at a different height (62, 85, 108, and 154 cm) and aerodynamically isolated from one another, collected 2D wind speed and direction data at 0.5 Hz sampling. Fitting Equation (1) to these wind speeds averaged over more than an hour for each anemometer (with standard deviations taken as the measurement uncertainties) gave u⋆ = 26 ± 3 cm s−1 and z0 = 0.01 ± 0.01 cm, consistent with the very small z0 expected for a calm sea (Kraus 1966).
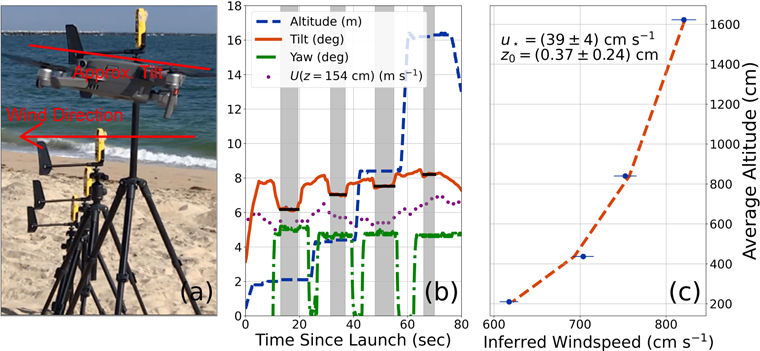
Figure 1. (a) Field set-up. The four anemometers measuring wind speeds at various heights are in the background. The drone is hovering flush with the uppermost anemometer. (b) Drone telemetry (curves) and wind speed (purple dots) collected by the uppermost anemometer (in m s−1). The dashed blue curve shows the drone altitude (in m), the solid orange curve shows the tilt (in degrees), and the dashed–dotted green curve shows the yaw (in degrees azimuth). The gray shaded regions show when the drone settled at a fixed altitude and attitude, allowing determination of an average tilt (shown by the horizontal solid black lines). (c) Inferred wind speeds at each altitude (blue dots), along with uncertainties estimated by combining in quadrature the uncertainties on the drone tilt and on the tilt-wind speed relationship. The dashed, orange line shows the model fit, and wind profile parameters with uncertainties are indicated.
Download figure:
Standard image High-resolution image{kind=link}
Alongside the anemometers, we flew a Phantom Mavic 2 drone, a 907 g quadcopter with dimensions when deployed of 322 × 242 × 84 mm. The drone provides a real-time telemetry stream at 10 Hz sampling, including aircraft attitude, GPS location, and altitude. By hovering next to one of the anemometers, we robustly determined the tilt-wind speed relationship for the drone, corresponding to 1.0 ± 0.1 m s−1 deg−1. Next, we programmed the drone to ascend to and hover for 30 s at each of four altitudes (2, 4, 8, and 16 m) consecutively. Figure 1(b) shows the resulting telemetry. We averaged the drone tilt measurements at each altitude (again, taking standard deviations as the uncertainties) and estimated the corresponding wind speed via the tilt-wind speed relationship, Figure 1(c). Fitting the resulting wind profile returned u⋆ = 39 ± 4 cm s−1 and z0 = 0.37 ± 0.24 cm. These values agree (to within 3σ) with the values determined by the anemometers, sufficient for the proof-of-concept demonstration here.
3. Conclusions
These results support the possibility of inferring a near-surface wind profile using only the attitude of a drone, rather than requiring a dedicated anemometer tree. This approach, however, has important limitations. For instance, winds exhibit temporal variability, so measuring a wind profile at several points consecutively rather than simultaneously could result in inaccurate values. However, monitoring the wind speed at one specific altitude can reveal the timescale of variability and help mitigate this issue. Figuring out how to thread the needle between hovering long enough to obtain an accurate average tilt and not hovering so long that wind conditions significantly evolve would be useful for future work. Also, time series analysis techniques that incorporate turbulent or non-Gaussian noise would likely make estimates of the average wind speed at a given altitude more robust.
The precision to which the wind profile parameters can be determined depends on the details of the experiment (number of profile points, duration of hover, how many different locales, etc.), but how accurately would the parameters need to be measured to be useful for Mars studies? For u⋆, improved estimates are required to predict the onset of aeolian activity. Newman et al. (2022a) discuss estimates for the friction velocities required for mobilization, which range from 0.5 to about 1.5 m s−1 for 100 μm grains, for example. The predicted range for the threshold u⋆ therefore spans a wide range, so significant improvements via drone-based measurements seem readily achievable.
Publicly available reports 1 indicate that the currently operating Ingenuity drone has a precision inclinometer, and the drone has hovered alongside the Mars 2020 rover, which itself has several anemometers. Thus, the calibration data required to establish Ingenuity's tilt-wind speed relationship are likely already collected. Moreover, Mars 2020 has observed several dust movement events (Newman et al. 2022b), and so the data required to estimate the relevant friction velocities may also already be collected. Although the Ingenuity telemetry is not yet publicly available, the mission will make it available once the experiment has ended (N. Williams 2022, private communication).