
Abstract
We designed a new soft piezoelectric polymer actuator with a multilayer structure using the environmentally friendly polymer poly(lactic acid) (PLA). PLA is a chiral polymer having two isomers. One is poly(l-lactide) (PLLA) and the other is poly(d-lactide) (PDLA). PLLA and PDLA exhibit piezoelectric constants with opposite signs owing to their chirality. On the basis of their piezoelectric characteristics, we were able to realize a PDLA and PLLA multilayer film (PDLA/PLLA multilayer) with a simple structure. The PDLA/PLLA multilayer film of centimeter-order size exhibited a large piezoelectric resonance and its piezoelectric performance was equivalent to that of a practical piezoelectric ceramic. In this paper, as a first step toward realizing a new film actuator using the PDLA/PLLA multilayer film, we introduce the piezoelectric characteristics of a PLLA film and the concept of an actuation system using a PLLA film. Next, the fabrication process of the PDLA/PLLA multilayer film and its piezoelectric characteristics are summarized. Finally, typical examples of developed piezoelectric polymer actuation systems using a PDLA/PLLA multilayer film are described to demonstrate the potential application of piezoelectric polymer actuation systems.
Export citation and abstract BibTeX RIS
1. Introduction
A human–machine interface (HMI) connects people with machines. At present, sensor systems, such as touch panels and touch-screen displays, are widely adopted as HMIs in smartphones and tablet personal computers (PCs). Recently, haptics, which is the technology of applying the sensation of touch to interactions with computer applications, has attracted considerable attention because users can receive feedback from a computer, such as a touch panel, in the form of felt sensations in the hand or other parts of the body. Usually, users feel a rapid vibration as feedback from a computer. At present, the vibration is usually produced by eccentric motors. On the other hand, the development of breakthrough wearable HMIs such as the Apple Watch and Google Glasses is progressing toward the realization of the Internet of Things (IoT). However, miniaturized and lightweight vibrators with low power consumption are required for wearable HMIs. The development of smart actuators toward the realization of such vibrators is expected to promote the study of HMIs in the future. Also, small, soft, and flexible actuators are widely applied in the micromechanical, medical, and biological fields.1–7) In particular, the development of a light rotational actuator to achieve rotation in a minute space is required. The rotational actuators fabricated from lead zirconate titanate (PZT) ceramic, a practical piezoelectric material, are a well-known application of the piezoelectricity of PZT.1–5) One of the weak points of PZT rotational actuators is their complex fabrication process, which is very difficult to realize using both micromachines and large industrial equipment.1–7) During actuation, when the temperature is increased by friction and the environment, the resonance frequency at which the actuator can operate is changed greatly owing to the pyroelectricity of PZT. Thus, a complex control system for optimizing the resonance frequency has to be designed. Also, from the viewpoint of reducing environmental impact, an alternative lead-free piezoelectric material with the same specifications as PZT is required. In particular, lead-free bio-based polymers exhibiting piezoelectricity have attracted attention as a means of realizing new electronic parts and as alternatives to PZT.8–16)
Piezoelectric polymers have been generating high hopes and strong interest as materials to solve the above problems for a long time. However, these problems have not been solved since their piezoelectric performance is very poor compared with that of PZT.1–16) For example, the piezoelectric constant of the well-known ferroelectric polymer poly(vinylidene fluoride) (PVDF) is less than 1/10 that of PZT, and PVDF also exhibits pyroelectricity. Thus, even though PVDF has the advantage of softness, a light weight, and flexibility, its poor piezoelectricity limits its potential application as an actuator.
Poly(l-lactide) (PLLA) is an environmentally friendly polymer exhibiting piezoelectricity. Similarly to PVDF, an actuator using PLLA cannot be realized because its piezoelectric constant is very small.1–16) On the other hand, unlike PZT and PVDF, no poling treatment is required to induce piezoelectricity in an entire PLLA piece/film.1–16) Such a poling treatment requires the application of a high dc voltage of over 1 kV to the material. For this treatment, electrodes must be prepared on the surface, making the fabrication process very complex. On the other hand, the fabrication of a piezoelectric PLLA film only requires uniaxial orientation treatment because no poling treatment is required for a PLLA film.11,13,15,16) To fabricate a workpiece with a complex shape, PLLA is easier to use than PZT and PVDF. This difference originates from the piezoelectricity of PZT and PVDF arising from their ferroelectricity.1–8,17) In other words, macroscopic remanent polarization is necessary, which must be induced by poling. On the other hand, the piezoelectricity of PLLA is due to the cooperative motion of the permanent dipoles in the principal chain molecules.11,13,15,16) Thus, PLLA is not ferroelectric and therefore does not exhibit pyroelectricity which is one of the characteristics of ferroelectrics. Hence, no poling treatment is required for PLLA.1–18) This is a major advantage in industrial application since a complex system for controlling the temperature is not required. Furthermore, PLLA is a typical bio-based polymer produced from a plant and is used as an industrial raw material.8,15,16) Thus, it can be considered as an eco-friendly piezoelectric material.
Owing to the above advantages, in this paper, we introduce a new soft actuator3) based on a newly designed rotation system that uses the unique piezoelectric properties of PLLA films.
2. Piezoelectricity of PLLA
Piezoelectricity is the ability of certain dielectric materials to generate an electric displacement Di in response to a mechanical stress Tj, as given by Eq. (1).18) The opposite effect also occurs: the application of an electric field Ei produces a mechanical strain Sj, as given by Eq. (2).18)


Here, the right-hand axes x1–x2–x3 are assumed and dij is the piezoelectric tensor. Also, it is well known that the macro-piezoelectricity of a PLLA film is based on the piezoelectricity of the crystal state,18–21) which originates from the crystal structure of PLLA. The PLLA crystal structure is based on a base-centered orthorhombic unit cell. Its point group is D2, as shown in Fig. 1, and there are three independent shear piezoelectric tensors, d14, d25, and d36.1–16,18) However, in general, translational symmetry does not exist in the polymer film because of its complex high-order structure, as shown in Fig. 2. In other words, amorphous components are always present in the complex high-order structure. No one-to-one correspondence has been found between macro-piezoelectric properties and crystal characteristics. For the crystalline polymer, we must consider the macroscopic symmetry on the basis of point group theory, as shown in Fig. 3. For example, an isotropic film does not exhibit piezoelectricity even though it exists in the crystal state. As can be seen in Fig. 3,3,11,13,18) asymmetry is imparted to the film by conventional methods such as drawing and poling.1,9,12,15) The purpose of the drawing process is to macroscopically arrange the chain molecules in a polymer film along one direction of the entire film.1,2,10) The purpose of the poling process is to macroscopically arrange the dipole moments of the molecules along one direction of the entire film. Actually, an isotropic film is not piezoelectric even though piezoelectricity exists in the crystal state.1,2,10) The point group of drawn and poled films of ferroelectric polymers such as PVDF is C2v as shown in Fig. 3.1,8–12) The symmetry of the drawn and poled PVDF film is the same as that of the PVDF crystal. A drawn and poled PVDF film is well known to exhibit high tensile piezoelectricity in the macroscopic state.1,2,10)
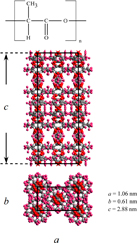
Fig. 1. PLLA crystal structure.
Download figure:
Standard image High-resolution image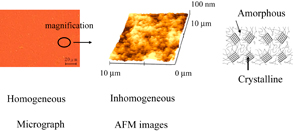
Fig. 2. High-order structure of PLLA with ordering at various scales.
Download figure:
Standard image High-resolution image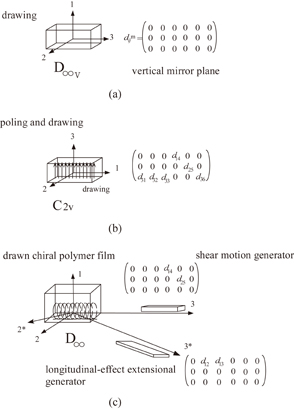
Fig. 3. Macroscopic symmetry of polymer film and its piezoelectric tensor: (a) drawn polymer film, (b) poled and drawn film (PVDF), and (c) drawn chiral polymer film (PLLA).
Download figure:
Standard image High-resolution imageAlso, a polymer film that is only drawn does not exhibit piezoelectricity because the point group is D∞v owing to the existence of a vertical mirror plane. However, PLLA has chirality.11,13,15,16,19–21) Upon drawing a PLLA film, the vertical mirror plane disappears and the point group becomes D∞. This leads to the existence of two independent piezoelectric constants, d14 and d25.11,13,15,16,19–21) We emphasize that the point group in the macroscopic state is different from that in the crystal state. Thus, the macroscopic piezoelectricity of a drawn PLLA film is a result of its intrinsic piezoelectricity due to its crystal state. In other words, the mechanism of macroscopic piezoelectricity is made complicated by the existence of a complex high-order structure.
Next, we introduce a novel type of motion due to shear piezoelectricity.22–24) A new type of actuator constructed from a pair of PLLA sheets with shear piezoelectricity was fabricated (L-sheet), as shown in Fig. 4(a-1).24) The shear piezoelectricity produced a displacement due to the shear strain caused by shear piezoelectricity under the application of a dc voltage. Also, a bimorph sheet was prepared, as shown in Fig. 4(b-1).24) The bimorph sheet consists of two layers with asymmetric rates of expansion and generates bending displacement. The displacement of the bimorph sheet was produced by bending motion due to the tensile piezoelectricity of the bimorph under the application of a dc voltage. We simulated the displacement of the L-sheet and bimorph sheet, where one end was clamped and the other end was free to move under the application of a voltage, as shown in Fig. 4.24) For the bimorph sheet, movement due to expansion was produced, as shown in Fig. 4(b).24) On the other hand, under the application of voltage, the movement of the L-sheet resembled that of a level-crossing gate, as shown in Fig. 4(a).24) On the basis of the simulation results, we attempted to design "fingers with small joints" that can perform complicated motion.25–27) We developed a prototype system of electrically controlled fingers with small joints fabricated by combining L-sheets and bimorph sheets, as shown in Fig. 5.27) We recorded a video of the test demonstration using a charge-coupled device (CCD) video camera. As shown in Fig. 5,27) the grasping of a polystyrene bead cluster using PLLA sheets was controlled via the applied voltage, and the grasping (a-1, a-2, a-3), releasing (b-1, b-2, b-3), and removal (c) of a cluster of polystyrene beads were demonstrated. These images show motion similar to that of human fingers.
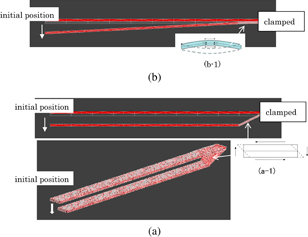
Fig. 4. Motion due to shear piezoelectricity (a) and due to tensile piezoelectricity (b).
Download figure:
Standard image High-resolution image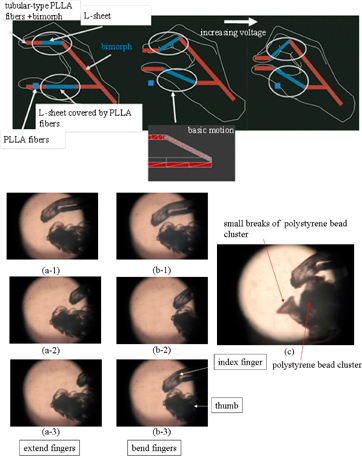
Fig. 5. Photographs of grasping of a polystyrene bead cluster using PLLA sheets controlled via the applied voltage: (a-1, a-2, a-3) grasping, (b-1, b-2, b-3) releasing, and (c) removal of polystyrene bead cluster.
Download figure:
Standard image High-resolution imageNote that PLLA exhibits shear-type piezoelectricity. This is very important and may be responsible for its unique properties.
3. Improving the piezoelectricity of PLLA films
The piezoelectric constant of PLLA is lower than that of piezoelectric ceramics because of the nonuniform structure in the PLLA film (high-order structure). An external force does not propagate through the amorphous region because of the difference in hardness and density between the crystalline and amorphous regions, as shown in Fig. 6.21,28–30) Thus, the piezoelectric constant of a PLLA film is small even though the piezoelectric constant of PLLA is large in the crystal state. In this study, by combining the following procedures, we produced a high-order structure with high piezoelectricity, as shown in Fig. 7.21,28–30) We optimized the content of the D-type isomer and the molecular weight. By decreasing the content of the D-type isomer and increasing the molecular weight, a new high-order structure with high regularity was formed.28,29) Then, we performed supercritical CO2 treatment,28) in which supercritical CO2 penetrates between molecules in the lower-density amorphous region and dissolves them, leading to their removal. Finally, we fabricated a PLLA film by applying a momentary high pressure to rearrange the remaining molecules to form an amorphous structure with a relatively high density, to induce the reorientation of the crystals, and to significantly increase the crystal size.21,30) The properties of the obtained films are summarized in Table I.28) We found that the piezoelectric constant reached 16 pC/N, over three times that of a conventional PLLA film.
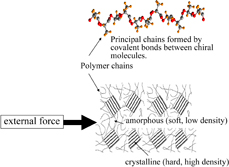
Fig. 6. Illustration of an external force propagating toward crystallites through the amorphous region in a PLLA film.
Download figure:
Standard image High-resolution image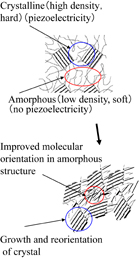
Fig. 7. Illustration of effective method for improving piezoelectricity.
Download figure:
Standard image High-resolution imageTable I. Properties of piezoelectric PLLA films.
| Molecular weight (×104) | 6 | 18 | 18 | 50 | 50 | 24 |
| Isomer (D-type) content (%) | 1.0 | 0.1 | 0.1 | 0.1 | 0.1 | 0.08 |
| Drawing ratio | ×4 (100 °C) | ×5 (95 °C) | ×6 (90 °C) | ×4 (80 °C) | ×5 (100 °C) | ×7 (100 °C) |
| Melting point (°C) | 175.2 | 175.4 | 176.5 | 182.0 | 184.5 | 185.7 |
| Degree of crystallinity (%) | 57.4 | 73.4 | 72.2 | 74.7 | 76.5 | 57.5 |
| Coefficient of orientation | 0.970 | 0.981 | 0.949 | 0.972 | 0.966 | 0.981 |
| Shear piezoelectric constant (pC/N) | 5.4 | 7.2 | 8.0 | 7.1 | 10.9 | 16.7 |
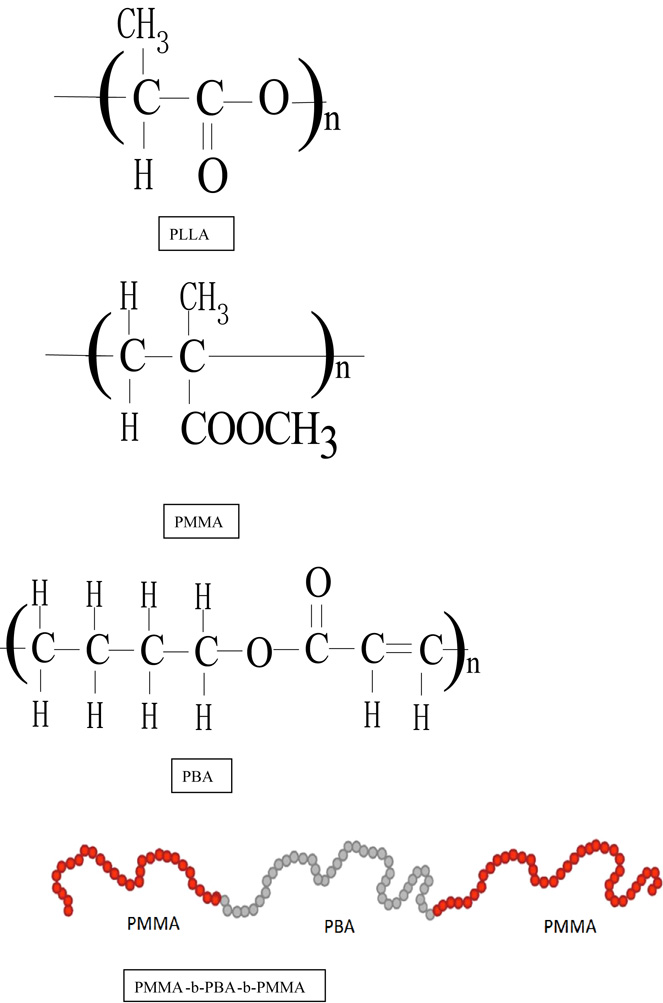
Next, we attempted to improve the piezoelectric performance in a different way by altering the structure in the amorphous region. Specifically, by using additives, the higher-order structure of a PLLA film was changed to improve its piezoelectricity. The additive used was a triblock copolymer, which is a pure acrylic symmetric block copolymer consisting of a center block of poly(butyl acrylate) (PBA), corresponding to its soft part, and two side blocks of poly(methyl methacrylate) (PMMA), corresponding to its hard part.29) The triblock copolymer is hereafter denoted as PMMA-b-PBA-b-PMMA and its structure is shown in Fig. 8.29) Here, the chain length ratio of PMMA to PBA is 2.8. The piezoelectric constant of the PLLA film after adding PMMA-b-PBA-b-PMMA (PLLA/[PMMA–PBA–PMMA] film) was over twice that of the PLLA film without adding PMMA-b-PBA-b-PMMA (reference PLLA film). The results are summarized in Table II.29) Also, we found that the glass transition temperature increases with increasing PMMA-b-PBA-b-PMMA content. From atomic force microscopy (AFM) images, it was found that upon the addition of PMMA-b-PBA-b-PMMA, the grain structure in the PLLA/[PMMA/PBA/PMMA] film became more uniform than that in the reference PLLA film, as shown in Fig. 9.29) In summary, the highly developed structure in the PLLA film changed to a minute and uniform structure in the PLLA/[PMMA/PBA/PMMA] film. In other words, as a result of realizing this higher-order structure, the external stress was effectively applied to the molecular chains in the crystal, and significant rotation of the C=O dipole occurred, as shown in Fig. 1. Thus, the piezoelectric constant of the PLLA/[PMMA/PBA/PMMA] film increased. Thus, to realize PLLA films with high piezoelectricity, it is important that a homogeneous higher-order structure is formed.
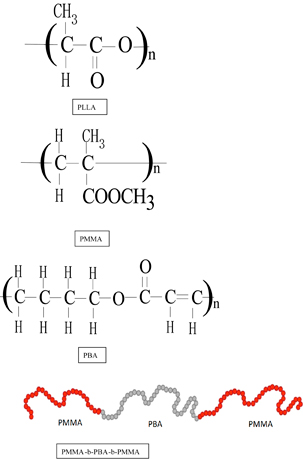
Fig. 8. Structural formulas.
Download figure:
Standard image High-resolution imageTable II. Maximum piezoelectric constant of PLLA film modified with PMMA-b-PBA-b-PMMA.
| PMMA-b-PBA-b-PMMA /PMMA molar ratio | Blend weight ratio PLLA:PMMA-b-PBA-b-PMMA | Drawing temperature (°C) | Drawing ratio | Young's modulus (GPa) | Piezoelectric constant (pC/N) |
|---|---|---|---|---|---|
| 40/60 |  |
105 | 8 | 1.40 | 9.3 |
| 50/50 |  |
105 | 6 | 1.67 | 9.5 |
| 55/45 |  |
105 | 5 | 0.69 | 16.3 |
 |
105 | 5.5 | 1.31 | 10.9 | |
| 62/38 |  |
105 | 5.5 | 1.85 | 10.6 |
 |
95 | 5.5 | 1.47 | 8.3 | |
| 70/30 |  |
105 | 4 | 1.39 | 9.2 |
 |
105 | 5 | 1.06 | 14.1 | |
 |
75 | 5 | 1.83 | 9.7 | |
 |
105 | 6 | 2.31 | 9.5 | |
 |
75 | 5 | 2.57 | 9.1 | |
| 85/15 |  |
75 | 5 | 1.92 | 6.3 |
| PLLA reference | 105 | 4 | 1.33 | 7.5 | |
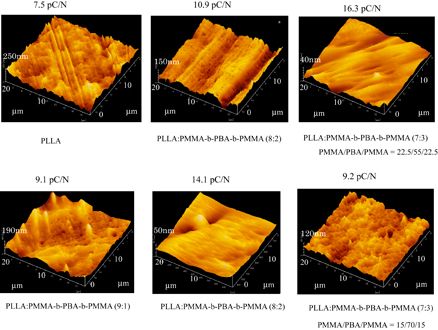
Fig. 9. Three-dimensional AFM images of PLLA/[PMMA/PBA/PMMA] films and reference film.
Download figure:
Standard image High-resolution image4. Concept of our new soft actuator
We previously reported our concept for producing the actuation force of a PLLA film using a surface wave.22–27,31–33) Here, we give an outline of the concept before introducing the principle of a PLLA actuator.3) A surface wave, such as a Rayleigh wave, has been utilized as the actuation force of a PZT ultrasonic motor.3) The surface wave is created by the fusion of longitudinal and transverse waves near the surface.3) Hence, the size and shape of an object are restricted by the resonance conditions of the longitudinal and transverse waves.3) In contrast, the concept behind the soft actuator is to use a PLLA film with a shear piezoelectric constant, and an acoustic surface wave generated on the PLLA film, such as a surface wave, is applied as the actuation force. The necessary conditions for generating a pseudo-Rayleigh wave in a PLLA film have already been thoroughly investigated and are shown in Fig. 10.33) If a longitudinal wave and a shear wave are generated simultaneously and combined in a PLLA film, an acoustic surface wave (pseudo-Rayleigh wave) should be generated on the end face of the PLLA film. Because of the mechanical loss of PLLA films, it is very difficult for two different resonance phenomena (longitudinal and shear waves) to occur simultaneously in a PLLA film. Both resonance phenomena depend on the size and shape of the object, in other words, the size and shape of actual devices are restricted. Therefore, we considered the possibility of generating surface waves on the end face of PLLA films that are formed by the fusion of shear piezoelectric displacement and a longitudinal wave due to a resonance phenomenon. If only a longitudinal wave was produced, the size and shape of the PLLA film would limit the range of possible conditions. In other words, we do not need to use a PLLA film with a certain aspect ratio and the flexibility of the device layout can thus be increased.
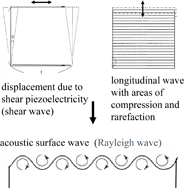
Fig. 10. Illustration of necessary conditions for generating acoustic surface wave.
Download figure:
Standard image High-resolution image5. PLLA film roll transducer
On the basis of the above concept, we have already realized a PLLA film roll transducer by rolling up a PLLA film into a long thin roll, as shown in Fig. 11.32,33) We used a rolled up PLLA film because it is difficult to use an acoustic surface wave as the actuation force of an actuator made of a PLLA film since its end face is very thin and soft. Then, we investigated the possibility of generating a surface wave on the end face of the PLLA film roll transducer. A plastic ball with a thin wall, a diameter of 40 mm, and a weight of 3.2 g was placed on the upper end face of the roll transducer, as shown in Fig. 12.31–33) It was found that the plastic ball rotated smoothly at a speed of 195 rpm in the counterclockwise direction when a voltage with an amplitude of 350 V and a frequency of 8.8 kHz was applied. Figure 13 shows the rotation speed dependence on the amplitude of the applied ac voltage with a frequency of 8.8 kHz.31–33) The rotation speed was proportional to the amplitude of the ac voltage in the amplitude range from 100 to 400 V. Furthermore, Fig. 14 shows a plot of the rotation speed of the ball against the frequency of the applied ac voltage with an amplitude of 350 V.31–33) As the frequency was decreased from 12 kHz, the plastic ball rotated counterclockwise with a maximum speed of 200 rpm at 12 kHz, and when an ac voltage with a frequency of 9.14 kHz was applied, the rotation of the container stopped. The plastic ball suddenly started to rotate clockwise at a speed of 150 rpm when an ac voltage with a frequency of 7.97 kHz was applied. When the frequency was decreased to below 7 kHz, the rotation of the container stopped again. These experimental results suggested that the direction of rotation of the container can be controlled by controlling the frequency of the applied ac voltage. On the basis of this concept, a system for controlling the direction of actuation is shown in Fig. 15. The experimental system is composed of a PLLA film roll transducer and mechanical parts. The rotation direction of a plastic disk was controlled by the frequency of the applied ac voltage and, as a result, the direction of motion of a plastic propeller could be controlled. When a voltage with an amplitude of 250 V and a frequency of 8.6 kHz was applied to the PLLA film roll transducer, the plastic propeller moved upward owing to the counterclockwise rotation of the plastic disk produced by the PLLA film roll transducer. In contrast, the plastic propeller moved downward owing to the clockwise rotation of the plastic disk produced by the PLLA film roll transducer when a voltage with an amplitude of 250 V and a frequency of 7.8 kHz was applied.
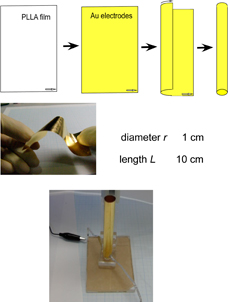
Fig. 11. Illustration of PLLA film roll transducer.
Download figure:
Standard image High-resolution image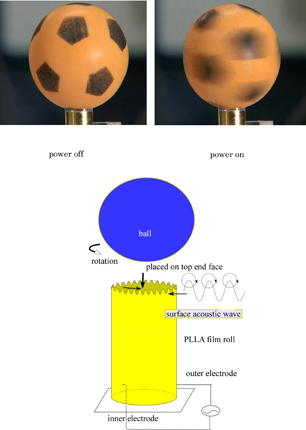
Fig. 12. Still image of a ball rotating on the top end face of a PLLA film roll transducer.
Download figure:
Standard image High-resolution image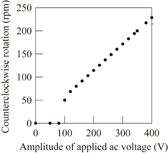
Fig. 13. Rotation speed dependence on amplitude of applied voltage.
Download figure:
Standard image High-resolution image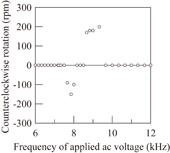
Fig. 14. Rotation speed dependence on frequency of applied voltage.
Download figure:
Standard image High-resolution image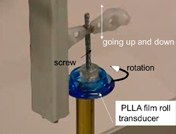
Fig. 15. Still image showing system for controlling the rotating direction of a plastic propeller on the top end face of a PLLA film roll transducer.
Download figure:
Standard image High-resolution imageIn summary, the clockwise and counterclockwise rotation of an object placed on the end face of the PLLA film actuator were freely controlled by changing the frequency of the ac voltage applied to the actuator, and the rotation speed could be controlled via the applied voltage. Thus, the PLLA film transducer based on our principle exhibited satisfactory performance for a lightweight object. We investigated whether our technology could be implemented with an increased actuation force. To increase the actuation force, we designed a multilayer actuator with a large actuation force.
6. Fabrication of PDLA/PLLA multilayer film
Polylactic acid is a chiral polymer with two optical isomers: PLLA and poly(d-lactide) (PDLA). Unfortunately, it is not yet widely known that PLLA and PDLA exhibit piezoelectric constants with opposite signs owing to their chirality.11,13,15,16,21,34,35) On the basis of their piezoelectric characteristics, we realized a multilayer film with a simple structure (PDLA/PLLA multilayer film), as shown in Fig. 16.31) The electric field is oriented along a line, the direction of which alternates between consecutive layers, because the piezoelectric motion of a PLLA film is in the reverse direction to that of a PDLA film under an applied electric field, as shown in Fig. 16. Therefore, a simple device structure comprising a PDLA/PLLA multilayer film was realized. We fabricated PDLA/PLLA multilayer films having up to 200 layers with a sandwich arrangement having a PDLA film of 7 µm thickness with an Al electrode on one side and a PLLA film of 7 µm thickness with an Al electrode formed on the other side.

Download figure:
Standard image High-resolution image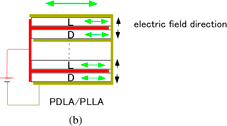
Fig. 16. Piezoelectric motion of PDLA and PLLA films: (a) single film, (b) PDLA/PLLA multilayer film.
Download figure:
Standard image High-resolution image7. Piezoelectric performance
We determined the resonance curve of the PDLA/PLLA multilayer film. In general, since the damping is large for a single PLLA film and its Q-value is very small compared with that of PZT, its piezoelectric resonance is difficult to measure.1–16) Because the piezoelectricity associated with the resonance of the PDLA/PLLA multilayer film increases with increasing number of layers, we could easily measure the piezoelectric resonance curve of a PDLA/PLLA multilayer film of 1 cm width and 5.5 cm length having 20 layers, as shown in Fig. 17. Here, we emphasize that the piezoelectric resonance curve, which could not previously be determined for a single PLLA film of 1 cm width and 5.5 cm length, is shown for the PDLA/PLLA multilayer film. Furthermore, Fig. 18 shows the piezoelectric resonance curves of PDLA/PLLA multilayer films having 100 and 200 layers. Their curves are very clear. On the basis of these piezoelectric resonance curves, we evaluated the electromechanical coupling coefficient kt, piezoelectric constant d, stiffness, and capacitance. Figure 19 shows the dependence of the piezoelectric characteristics and other physical properties on the number of layers of the PDLA/PLLA multilayer film. kt, d, the stiffness, and the capacitance increase with increasing number of layers of the PDLA/PLLA multilayer film. In particular, it is noteworthy that d reaches 800 pC/N, which is larger than values for practical PZT ceramics. Namely, a piezoelectric performance equivalent to that of PZT ceramics can be expected.1,3,9,15)

Fig. 17. Frequency dependence of admittance of a PDLA/PLLA multilayer film having 20 layers and a reference single PLLA film.
Download figure:
Standard image High-resolution image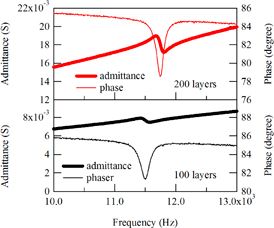
Fig. 18. Frequency dependence of admittance of PDLA/PLLA multilayer films having 100 and 200 layers.
Download figure:
Standard image High-resolution image
Fig. 19. Dependence of electromechanical constant kt, piezoelectric constant d, stiffness, and capacitance on number of layers of PDLA/PLLA multilayer film.
Download figure:
Standard image High-resolution image8. New soft actuator
A large apparent piezoelectricity associated with the resonance of the PDLA/PLLA multilayer film was observed. We attempted to use the PDLA/PLLA multilayer film with this large apparent piezoelectricity to provide the actuation force of a new soft actuator. We developed an experimental system for demonstrating the actuation of the PDLA/PLLA multilayer film, as shown in Fig. 20. The system includes a disk without a primary torque, which can be rotated. The system was designed so that the generated pseudo-Rayleigh wave on the end face of the PDLA/PLLA multilayer film acts as a torque driver. A PC with a weight of 2.1 kg was placed on top of the disk, as shown in Fig. 20. Here, we used two PDLA/PLLA multilayer films. When the amplitude of the applied ac voltage was over 150 Vpp and the frequency was 12.8 kHz, the laptop PC rotated. The rotation speed of the laptop PC became constant at 100 rpm within 10 s, which was maintained for over 20 h under the applied ac voltage. We emphasize that no complex mechanical parts were required to induce the rotation of the laptop PC. These experimental results may revolutionize the concept of current actuation systems and lead to the realization of new soft polymer actuators.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Fig. 20. Experimental system for demonstrating the actuation of the PDLA/PLLA multilayer film.
Download figure:
Standard image High-resolution image{kind=link}
9. Summary
Our goal was to realize a practical and useful piezoelectric polymer soft actuator fabricated from a lead-free bio-based piezoelectric polymer. We investigated the shear piezoelectricity of PLLA films and experimentally demonstrated the feasibility of achieving a new soft actuator using a PLLA film. Then, we attempted to improve the piezoelectric performance of PLLA by employing a multilayer film to enable its practical application as an actuator, and we developed a prototype actuator fabricated from the improved PLLA film. The realization of an actuator made from a piezoelectric polymer was previously considered to be impractical because of the small piezoelectric constant. However, the PDLA/PLLA multilayer film enables the realization of an actuator with a large power while retaining the softness, flexibility, and light weight of PLLA and PDLA films. We believe that PDLA/PLLA multilayer films have potentially limitless possibilities for realizing new types of actuator.
Acknowledgements
We thank Teijin Ltd. for kindly preparing the PLLA, PDLA, and multilayer films. We are also deeply grateful to many of our laboratory students at Kansai University who contributed their time and energy to this research. This work was supported in part by Grants-in-Aid for Scientific Research (Nos. 24655108 and 15K13714) from the Ministry of Education, Culture, Sports, Science and Technology of Japan.