



Abstract
Lava tubes are potentially important sites for the long-term human presence on the Moon because they provide shelter from surface hazards, including micrometeorites, radiation, extreme temperatures, and dust. The discovery of a lava tube opening or pit at Marius Hills in Oceanus Procellarum is compelling motivation for robotic and eventually human exploration missions to these sites for in situ investigations and site assessments to determine viability for habitation and utilization of lunar resources. We make the case for Marius Hills to be a high-priority landing site and present elements of lunar data analysis, instrument/payload concepts, science justification for robotic missions, and thematic geologic reconnaissance and remote sensing that should be conducted prior to any construction or emplacement of infrastructure. This is described as a "green reconnaissance" approach to lunar exploration and exploitation, which seeks to address such contamination factors as sprayed rocket exhaust and sublimating water in order to preserve science fidelity. We are developing a concept of operations called the Leto mission for a green reconnaissance approach to robotically access the Marius Hills sublunarean void.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 4.0 licence. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
The objective of this paper is to demonstrate the suitability of lunar pits, specifically the pit discovered in the Marius Hills region, as a potential landing site or base site for robotic and human exploration using site characterization, instrument development, and multiple data sets (e.g., high-resolution and color imaging, laser altimetry, radar mapping, and mineral mapping). Robotic and human mission reconnaissance is critical for the basic scientific understanding of lunar pits and their surroundings, as well as for the engineering constraints for determining viability of potential human habitation and emplacement of pressurized domes with associated infrastructure elements (Ximenes et al. 2011, 2012; Ximenes & Patrick 2013). A surface mission focused on the Marius Hills pit (MHP) and its surroundings is invaluable for demonstrating in situ resource utilization (ISRU). We believe that the site offers the potential for eventual long-term human settlement.
Site characterization investigations are the foundation for understanding the geology and resource potential of MHP and other lunar lava tube or cave-like features. The Marius Hills volcanic complex in Oceanus Procellarum is noted for its diverse assortment of lava flows, domes, cones, pits, and sinuous rilles (Greeley 1971; Lawrence et al. 2013). The distinctive geology of this volcanic field prompted its inclusion as a candidate site for an Apollo landing (Karlstrom et al. 1968; Elston & Willingham 1969; Wilhelms 1993). More recently, it was described as a target for week-long geological sortie missions (Clark 2011). The discovery of a "skylight" (a lava tube ceiling collapse) in the Marius Hills region by the Japan Aerospace Exploration Agency (JAXA) SELenological and ENgineering Explorer (SELENE; aka Kaguya) mission (and confirmed by the NASA Lunar Reconnaissance Orbiter (LRO) mission) once again brought attention to this site (Haruyama et al. 2009). Lava tubes are potentially important sites for long-term human presence on the Moon because they provide shelter from surface hazards, including micrometeorites, ionizing radiation, extreme temperatures, and dust (Hörz 1985; Boston 2010; Ximenes et al. 2012). The discovery of MHP, combined with the discovery of similar pits on the Moon (Ashley et al. 2011a, 2011b) and Mars (Cushing et al. 2007; Cushing 2012), is compelling motivation for robotic and eventually human exploration missions to these sites for in situ investigations and site assessments to determine viability for habitation. Lunar reconnaissance and site characterization are essential prior to any construction or emplacement of infrastructure (Ximenes et al. 2010, 2011, 2012; Hooper et al. 2013; Ximenes & Patrick 2013). Beyond the potential for human habitability, basic scientific understanding of pits and other sublunarean voids is critical for constraining theories about lava flow thermodynamics and mare emplacement (Hooper et al. 2013). The layered sequence of basaltic lava flows, combined with their associated pyroclastic deposits, preserves a record of the compositional and mineralogical history of the mantle and is essential for understanding lunar geologic evolution.
Sublunarean voids also are of great interest because of the potential utilization of lunar resources. Permanently shadowed regions (PSRs) of the lunar poles may serve as cold traps for the possible accumulation of volatiles, including water frost and ice if cryogenic temperatures are met (e.g., Watson et al. 1961; Arnold 1979; Pieters et al. 2009).
The possibility of discovering extensive lava tube systems—whether for human shelter or for potential natural resources—remains enticing. Since the discovery of MHP, we have focused on this site as a target of reference mission architecture for lunar lava tube reconnaissance missions (Ximenes et al. 2011, 2012; Hooper et al. 2013; Ximenes & Patrick 2013). When exploration begins, it will be important to preserve these pristine cave environments during first contact from the employed reconnaissance technologies. We define this as a "green reconnaissance" approach, and it is a fundamental component in the exploration plans for MHP.
2. Geologic Setting of the Marius Hills Pit
The Marius Hills volcanic complex comprises a plateau rising 100–200 m above the surrounding plains of Oceanus Procellarum (McCauley 1967, 1969). Volcanic landforms include sinuous rilles, cones, ridges, and low- and steep-sided domes (Greeley 1971; Whitford-Stark & Head 1977). Figure 1 displays the general setting and regional topography. The morphologic diversity seen in this volcanic complex is more extensive than normally observed on the Moon and may be the result of one or more proposed processes, including compositional variations, change in effusion rate, change in eruption style, or magmatic differentiation (e.g., McCauley 1967, 1969; Whitford-Stark & Head 1977; Weitz & Head 1999; Heather & Dunkin 2002; Heather et al. 2003; Lawrence et al. 2013). Most of the mare basalts in the region are Imbrian to Eratosthenian in age at 3.0–3.5 Ga, but some low shield structures are as young as 1.03 Ga (Hiesinger et al. 2016). Using the M3 spectrometer launched on board Chandrayaan-1, Besse et al. (2011) examined the Marius Hills volcanic complex for the first time from 0.46 to 2.97 μm. Robinson et al. (2012) and Lawrence et al. (2013) used the Lunar Reconnaissance Orbiter Camera (LROC) Narrow Angle Camera (NAC) to provide detailed images of volcanic cones and domes in the Marius Hills region. Despite the newer data sets obtained since the Lunar Orbiter and Apollo era, the formation of these lunar domes, sinuous rilles, and pits is still poorly understood.
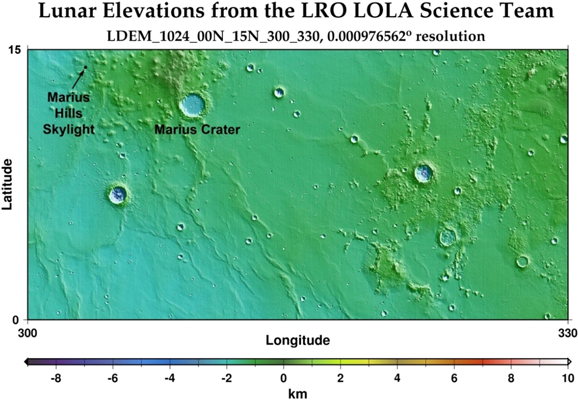
Figure 1. Topographic map of the Marius Hills volcanic complex with skylight/pit location using LOLA on board the LRO. Data were obtained from the Planetary Data System (PDS) Geoscience Node.
Download figure:
Standard image High-resolution imageLunar pits are steep-walled negative relief features found in mare, impact melt, and highland deposits (Robinson et al. 2012). The pits are formed by collapse into subsurface voids, though the voids may have formed through different processes (Wagner & Robinson 2014, 2015). In a recent morphometric study, Sauro et al. (2020) conclude that terrestrial lava tube collapse chains present striking morphological similarities to those proposed candidates on the Moon and Mars. They note that dimensions and morphometric parameters like the width/depth ratio have distinct ranges each pertaining to a different planetary body. After the discovery by Haruyama et al. (2009) of the steep-walled pit at Marius Hills, Robinson et al. (2012) initiated an extensive search of the lunar surface using meter-scale LROC NAC images. Their search revealed more than 225 previously unknown pits with diameters ranging from 5 to 900 m (median pit diameter of 16 m). Although the majority of these recently identified pits are located in impact melt deposits, five of the new pits are found in mare materials outside of impact melt deposits, and two pits are located in non-impact-melt highland materials (Wagner & Robinson 2014). Morphometric parameters of the pits, such as steep-walled slopes and high depth-to-diameter ratios, as well as the lack of raised rims and ejecta deposits, preclude an exclusively impact-related origin. The underground extent of the pits remains unknown because of shadows and the limitations of lunar off-nadir imaging, but Chappaz et al. (2017) note that the combination of low gravity and high eruption rates on the Moon may have allowed the formation of structurally stable caverns far larger than anything on Earth. They used Gravity Recovery and Interior Laboratory (GRAIL) data to search for evidence of large empty lava tubes beneath the lunar maria.
MHP is located in a sharp bend of a shallow east-to-west trending rille (Haruyama et al. 2009). The host rille cuts a preexisting wrinkle ridge, and there are numerous large volcanic domes within approximately 25 km of the pit, as discernible in Figure 1 (Weitz & Head 1999; Heather et al. 2003; Campbell et al. 2009; Lawrence et al. 2013). Numerous smaller domes closer to MHP (and perhaps the rille depression itself) can serve as protective barriers from lunar lander ejecta.
MHP has previously been proposed to be a skylight based on its location within a sinuous rille (Haruyama et al. 2009). The skylight classification already is well entrenched in the literature for Marius Hills (including many of our own publications), but most lunar pits are likely to be post-flow features rather than true volcanic skylights (Robinson et al. 2012; Wagner & Robinson 2014, 2015). We will refer to these lunar features as pits until more is known about their formation mechanisms.
NAC imaged MHP under a variety of lighting conditions with incidence angles ranging from 13° to 83° and diameter measurements of the pit opening ranging from 49 to 57 m (Ashley et al. 2011a, 2011b; Robinson et al. 2012; see Figure 2(a)). Shadow measurements showed a maximum depth of ∼44 m below the sharp rim and 51 m below the surrounding flat mare surface (Ashley et al. 2011a, 2011b; Robinson et al. 2012). These studies also determined that imagery with well-illuminated views of the pit walls revealed eight stratigraphic layers that range in thickness from 4 to 12 ± 1 m, with an average thickness of 6 m. This is illustrated in Figure 2(b).
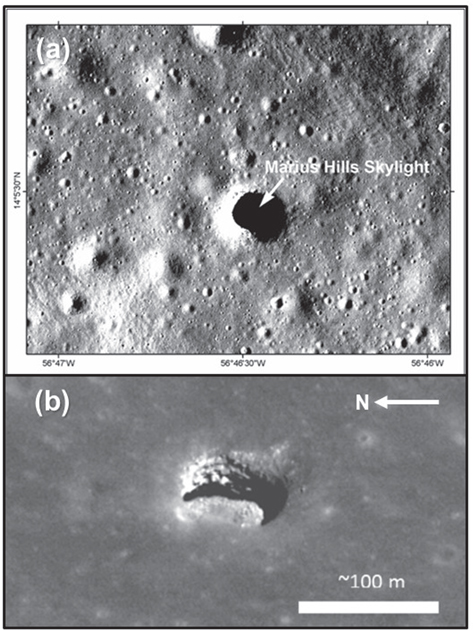
Figure 2. (a) MHP, the Marius Hills Skylight (pit), is approximately 50 m in diameter. Figure is derived from LROC NAC image M114328462R. Image source credit: NASA/GSFC/Arizona State University. (b) MHP imaged with a 34° incidence angle and a 45° emission angle (LROC NAC image M137929856R). Pit walls reveal basalt stratigraphy. Image source credit: NASA/GSFC/Arizona State University.
Download figure:
Standard image High-resolution image3. Green Reconnaissance
The concept of "green reconnaissance" for in situ exploration of the pristine lunar cave environment was introduced by Exploration Architecture Corporation (XArc) as a challenge to preserve the science inherent in such environments during their first contact by human and robot explorers and their associated equipment, systems, and spacecraft (Ximenes 2012). Accordingly, green reconnaissance for the MHP is defined as descending into the opening and entering the cave for the first time in as unobtrusive a manner as possible in order to preserve the fidelity of the science inherent in that environment (Hooper et al. 2013). A green reconnaissance approach also would employ criteria to minimize site contamination from lunar lander blast ejecta and the exhaust plume by landing behind natural protective features in the pit area and at a sufficient distance to serve as protective barriers from lunar lander ejecta contamination and damage. This green reconnaissance approach has implications for rover design and traverse capability. Subsequent missions may begin to land ever closer to the pit as science discovery phases out and transitions to a habitability phase for exploration of the site. Green reconnaissance protocols recognize the evolution of science mission investigations gradually giving way to the eventuality of intrusive engineering and habitability mission investigations in the development of the site for long-term settlement.
Another green reconnaissance technique stressing science protection protocols would involve descending into the pit and entering the pristine environment of the cave or tube for the first time in a manner designed to minimize disturbance. For instance, after autonomously deploying a cable line across the opening from a robotic platform located at the pit edge, an instrument suite would be lowered into the void (Ximenes et al. 2012; Ximenes 2012; Ximenes & Patrick 2013). Light Detection And Ranging (LiDAR) could collect a 3D point cloud of the lava tube, and evolving gas would be detected by a mass spectrometer (Patrick et al. 2012, 2013) either connected to the cable or placed on the pit rim. It is critical for first entry to be performed in a manner that preserves the pristine pit environment.
By its nature, green reconnaissance overlaps with planetary protection. It involves the evaluation and assessment of the unknown and the desire to preserve a pristine space or planetary environment until it can be studied in detail. During initial exploration, the prevention of biological contamination should be a necessary objective. Green reconnaissance implies low-impact development and sustainability. Future mission planning should consider an environmental impact statement.
Exploration strategies for green reconnaissance include such measures as
- 1.minimizing site contamination from lunar lander blast ejecta and fuel exhaust plumes;
- 2.study, modeling, and measurements of the outgassing of space materials;
- 3.study, modeling, and measurements of the water vapor signatures from astronaut life-support systems; and
- 4.emphasizing science protection protocols for descending into the pit and entering the cave for the first time in a manner that helps preserve the pristine environment.
All of our investigations in the field, in the laboratory, and in the classroom have been designed to address high-priority topic areas of lunar research, including
- 1.identification and/or characterization of potential landing sites of high lunar science return (e.g., geomorphology, regolith, radiation, and compositional properties); and
- 2.identification, distribution, transport, and characterization of volatiles in and on the Moon.
For human habitation, the basic idea for a habitable base or shelter in a lava tube is to provide safety from hazardous radiation, micrometeorite impacts, extreme temperatures, and dust. For temperature variation protection, where extremes at the lunar surface range from −180°C to +100°C in its diurnal cycle, a lava tube interior is estimated to provide a constant −20°C relatively benign temperature environment (Hörz 1985). This eases design of complex thermal insulation and control systems and provides easier thermal control management for engineering tasks and operations. The pit itself additionally offers architectural potential for utilizing external features. For example, where large pit openings exist, an opportunity to substantially increase livable volume areas by enclosing a lunar skylight pit with a pressurized dome allows inhabitants freedom from confines of living in modules or enclosed in a cave environment (Ximenes et al. 2012; Patrick et al. 2014).
There also is a possibility of water being available in lava tube entrances similar to the processes seen by the LRO Lyman-Alpha Mapping Project (LAMP) and the PSRs at the lunar poles (Haruyama et al. 2011; Sanin et al. 2012). Of additional importance from an exploitive perspective is their potential proximity to lunar resources. A sustained human presence on the Moon requires ISRU necessary to extract consumables (e.g., O2, H2O, N2, 3He) for human life-support system replenishment. Huang et al. (2011) have mapped potentially high concentrations of FeO and TiO2 in the Marius Hills region. Lava tubes as viable candidate sites for protective habitation for lunar outpost operations become increasingly attractive if desired raw materials are nearby.
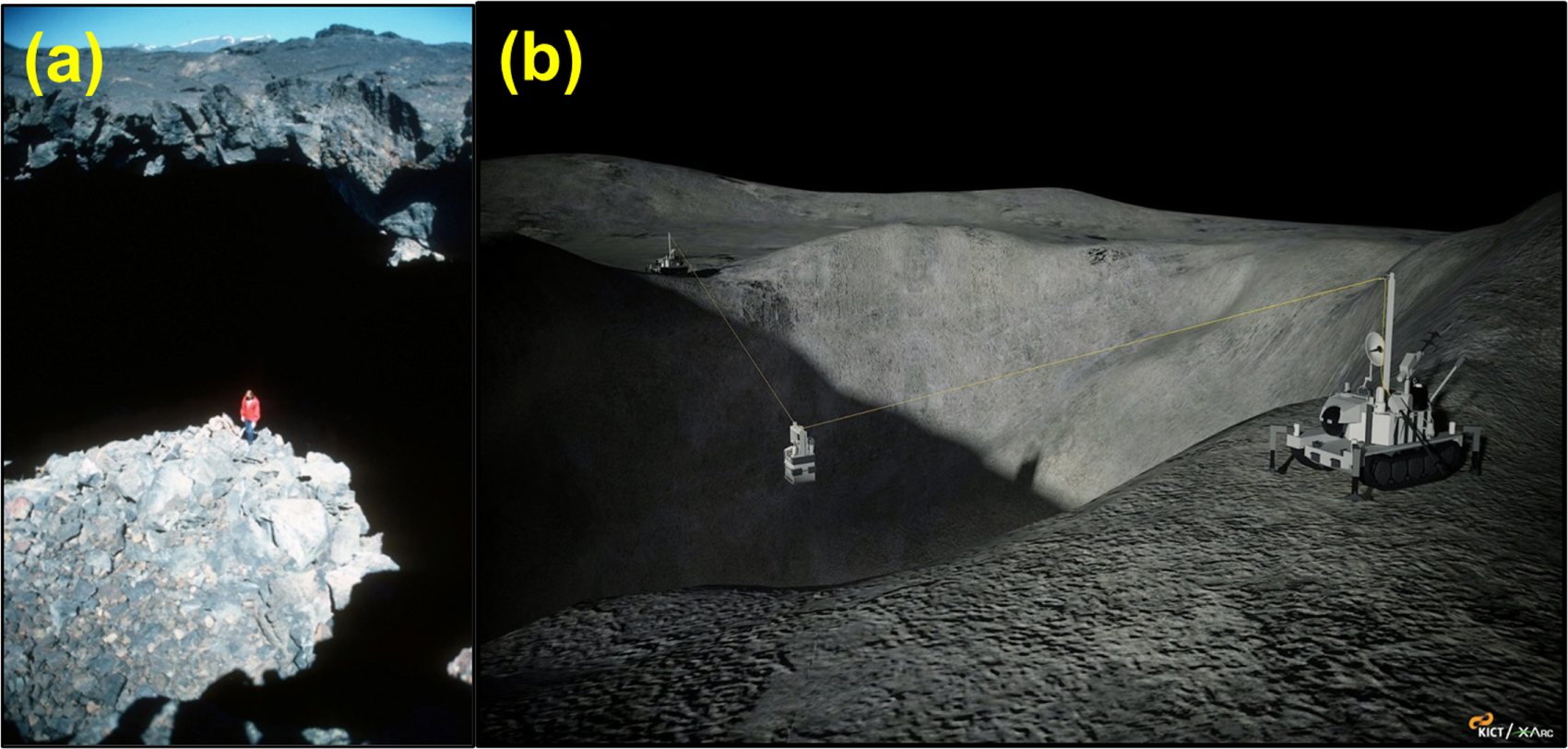
Basic scientific understanding of these features is necessary, as well as techniques for entering and examining them, both robotically and by astronauts. How far the subsurface void extends beyond the shadowed edges of the pit is unknown. It is apparent from present imagery that to reach these cavernous voids, traverses down cliffs of great depths of some 45–100 m or more with difficult terrain are required for both robots and human explorers, as demonstrated in Figure 3.

Figure 3. (a) A terrestrial lava tube with a skylight-type entrance similar to the one observed at Marius Hills is exhibited in this example from Craters of the Moon National Monument and Preserve (Idaho). For scale, sunlight is illuminating the figure on the rubble-strewn floor. Image credit: National Park Service. (b) One green reconnaissance technique would involve descending into the lunar pit in a nondisturbing manner with a type of zip line. Image credit: KICT and XArc.
Download figure:
Standard image High-resolution imageEqually challenging is the need for planetary protection during first contact with these pristine environments. Subsurface caverns preserve unique geologic environments with access to fresh, relatively dust-free outcrops of volcanic rock. In situ science investigations of the site in its pristine state would be paramount for first contact exploration. For planetary protection of MHP, detailed thematic mapping produced by our research will aid mission planning by providing a green approach to landing zone site selection or eventual "master planning" for development of the site's long-term human encroachment activities, such as surface mining operations and construction of architectural infrastructure elements.
A green reconnaissance approach for landing site selection at MHP for a robotic precursor science exploration mission would employ criteria to minimize site contamination from lunar lander blast ejecta and fuel plume exhaust. A nongreen approach for first contact with the site is the concept of fusing flyover data with surface data to achieve site characterization of the skylight by means of a lander trajectory flight path directly over the skylight hole during a precision landing approach (Peterson et al. 2011). This raises issues of site contamination from plume exhaust being dispersed over the target feature.
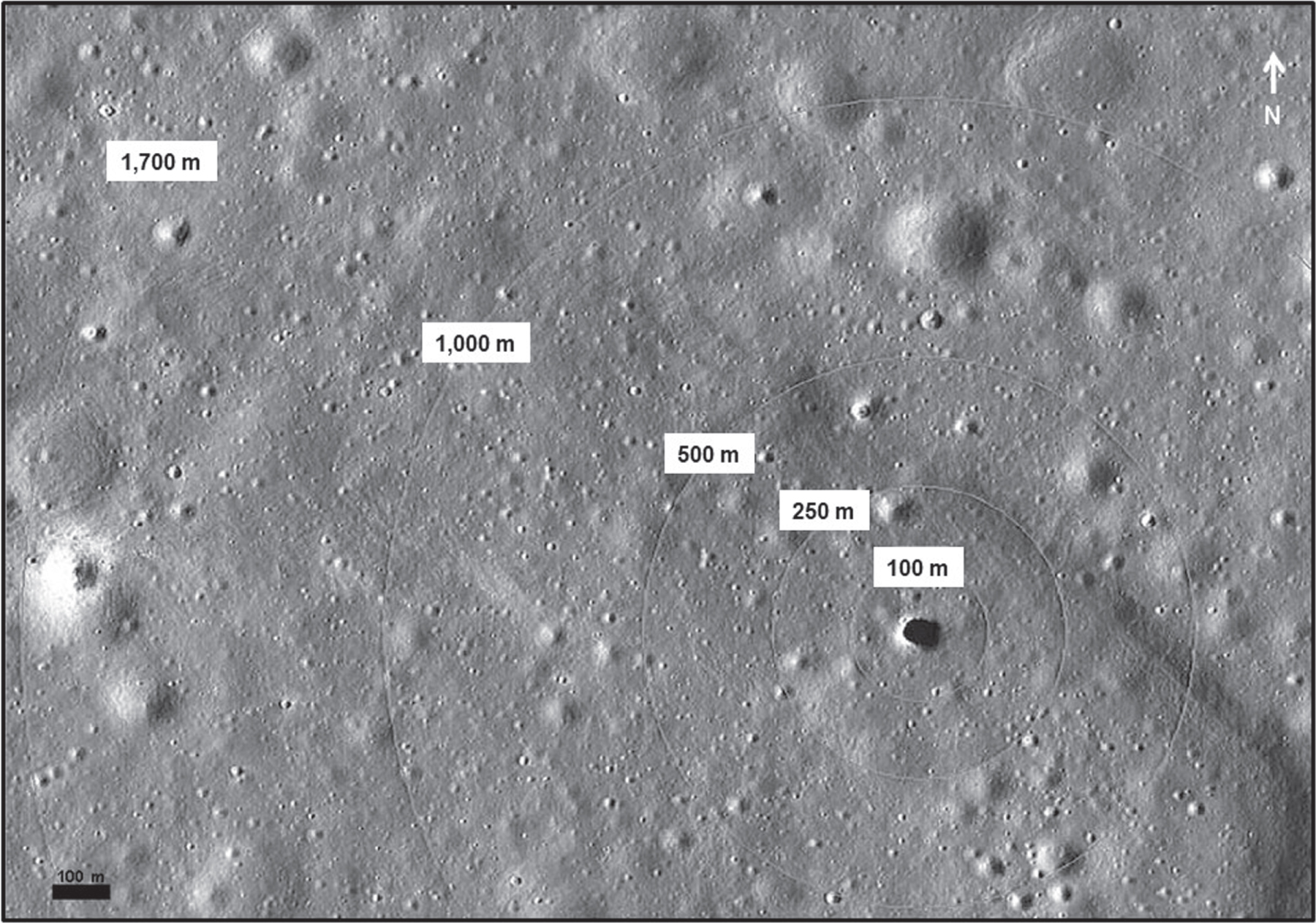
Precision landing requirements for achieving the closest possible staging location to the pit opening also may be detrimental to protecting the site from contamination. The driving requirement for precision landing is to autonomously land within 100 m of a predetermined location on the lunar surface (Johnson & Montgomery 2008). Precision landing may well be able to get within 100 m from the cliff edge, but research from Apollo data shows that average diameters of the landing site blast zones range from ∼150 to ∼260 m, and ejecta hundreds of meters more (Clegg & Jolliff 2012). Applying the concept of green reconnaissance, a protected zone should be established around MHP, as well as at other lunar pits (Figure 4). Precision landing requirements must balance the closest possible staging location to the pit versus lunar lander ejecta contamination. During initial exploration, a landing site behind some of the closer smaller domes north of the MHP shown in Figure 4 could potentially serve as protective barriers from lunar lander ejecta. A robotic rover would have to traverse approximately a 1000 m distance to the lunar pit before deploying instruments and equipment.
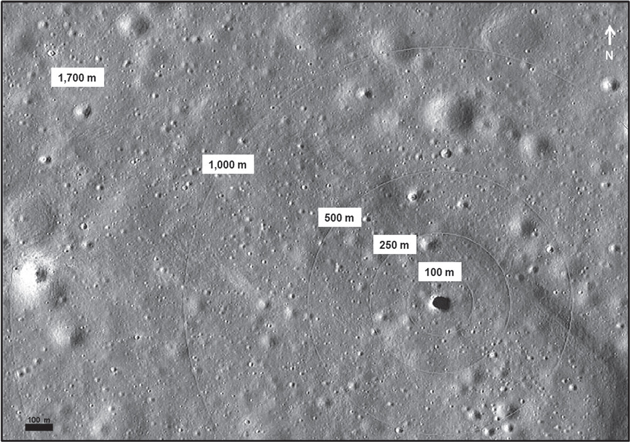
Figure 4. Labeled circles measure distance from the pit edge of MHP (dark circular spot) as a protection zone component of a green reconnaissance approach to minimize contamination from lunar lander blast ejecta and the engine exhaust plume. Mission planning scenarios incorporating local topographical and morphological characterization determine an appropriate distance from the pit for landing site and traverse approach. Image: LROC NAC image M114328462R. Image source credit: NASA/GSFC/Arizona State University.
Download figure:
Standard image High-resolution imageThe risk of site contamination from human-caused activity during early exploration stages of a site can be mitigated with a layered approach to intrusive technologies for acceptability of site disturbance and forward contamination. Considerations for planetary protection emerging from recent studies advocate localization and zoning of degrees of human impact (Boston 2010). Balancing the ever-increasing encroachment of human activities with science protection protocols is the premise of our investigation of green reconnaissance techniques.
4. Leto: A Robotic Reconnaissance First Contact Mission
The operational scenarios, technologies, and human and robotic performance feats associated with the first missions of planetary cave exploration are not well defined in the literature, or previously studied (Ximenes et al. 2012). Jawin et al. (2019) list landing sites (including Marius Hills) for Phase 1 Missions as employing static landers. Their Phase 2 Missions have enhanced technological capabilities, including automated landing site hazard avoidance, dust mitigation upon landing, and mobility via roving. Here we outline a concept of operations (ConOps) for a green reconnaissance approach for robotically accessing the MHP cave refuge. We named the mission to honor Leto, the mother of Apollo and Artemis (who was impregnated by Zeus and sought a place of refuge to give birth). Just as Leto sought a place to give birth to her twins, so does the Leto rover seek out the location of the birthplace of our lunar settlement.
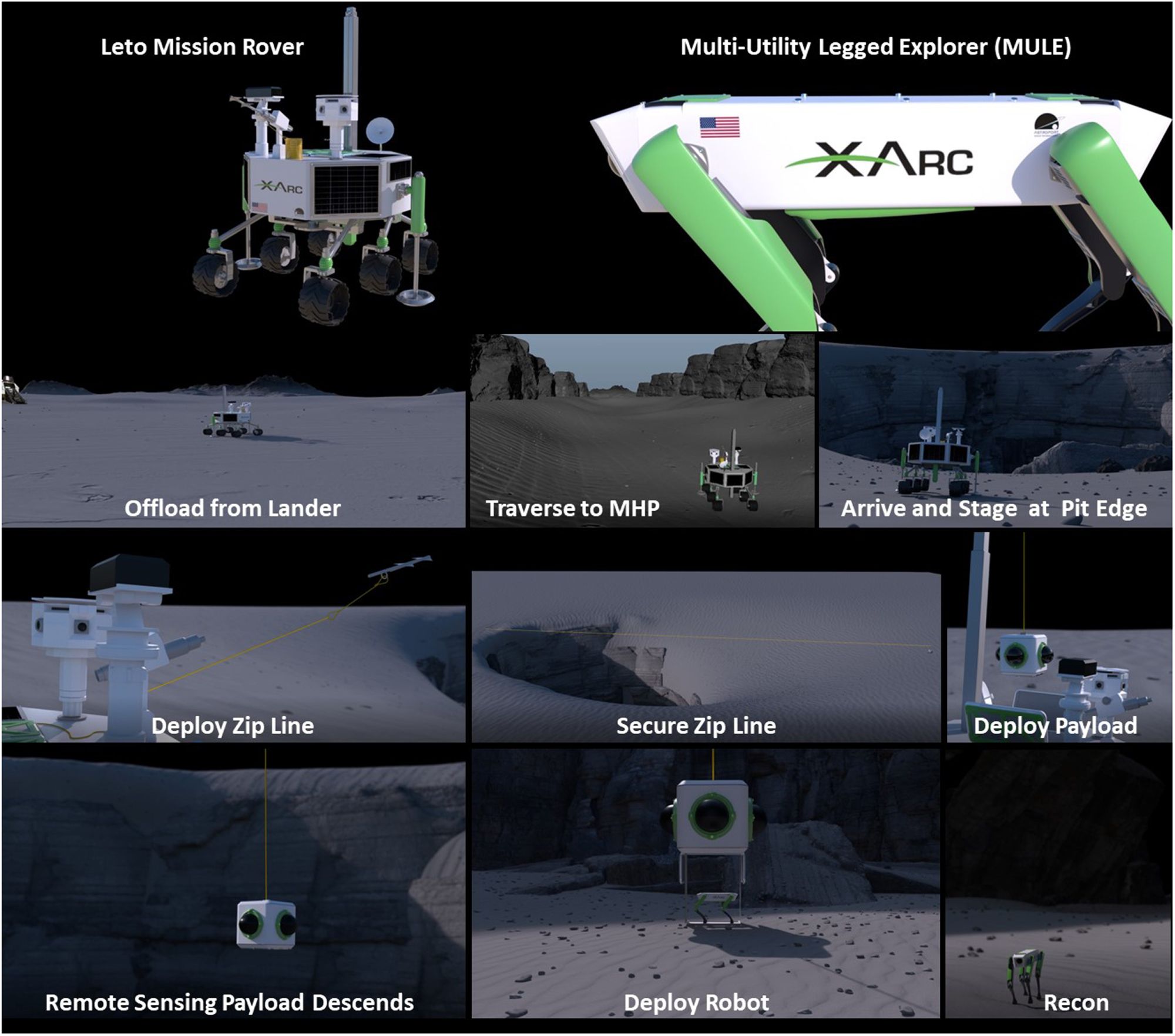
To protect the pit from contamination by a lander's rocket exhaust and plume blast ejecta, a robotic rover is landed at some distance behind high hills or geologic structures such as volcanic domes found in the surrounding area. As depicted in Figure 5, the robotic rover traverses a 1000 m path to find the lunar pit for deploying our Multi-Utility Legged Explorer (MULE) robot (Ximenes et al. 2012, 2021).
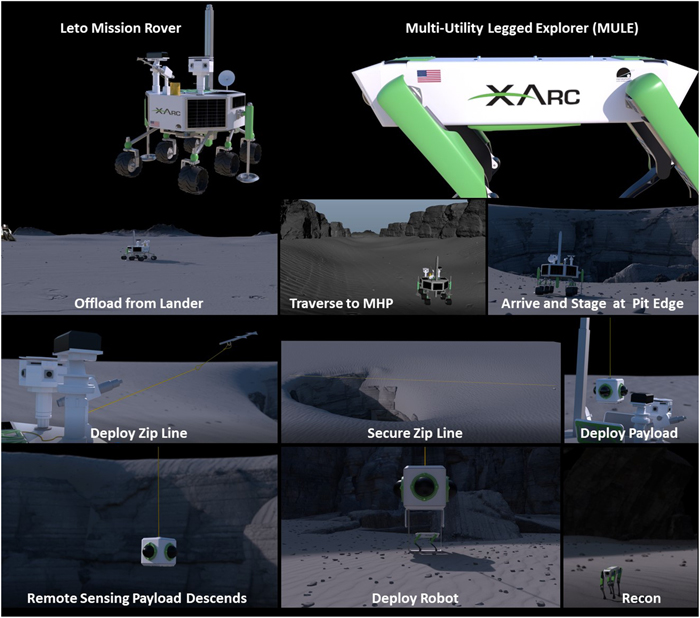
Figure 5. Mission concepts featuring a rover, MULE, and other technologies.
Download figure:
Standard image High-resolution imageMULE is a terrain-adaptable quadruped robot capable of traversing rugged cave terrain. These robots, colloquially named Spot, were developed by Boston Dynamics through Defense Advanced Research Projects Agency (DARPA) funding. NASA/JPL has also adapted the robot for their Collaborative SubTerranean Autonomous Resilient Robots (CoSTAR) program. The JPL "Au-Spot" is a modified version of "Spot," equipped with networked sensors and software to help it safely and autonomously scan, navigate, and map its environment.
As outlined in Ximenes et al. (2021), the Leto rover negotiates a traverse to a safe distance from the pit edge for staging and launch of a smart zip line across the pit void. The zip line is a tether with power, data, and communications. The zip line deployment is essentially a harpoon cannon mounted on the lander for shooting a ground penetrator for anchoring to the cliff walls of the pit. While other delivery methods exist, the harpoon solution set is a sophisticated approach that also represents a technology development investigation (or technology demonstration). Once the zip line is secured, the stored payload is offloaded and lowered into the pit. The zip line delivers the MULE robot(s) with a payload suite of science instruments for remote measurements of the pit as it descends and for exploring the pit and lava tube cave after descent. A data relay system aids reconnaissance and communication.
We are currently developing a ConOps and technology for tandem MULEs exploring the cave in a relay fashion, where one MULE-1 serves as the forward explorer with instrument suite and the second MULE-2 is a walking battery pack for extending the operating range of MULE-1. MULE-2 is tethered to the rover utility services via the lowered dropline providing power and communications. MULE-2 packs a robotic arm for sample investigations and any needed tether unsnagging. Retrieval of the reconnaissance robots is not intended and would add unneeded complexity to the mission ConOps. Robots relay all acquired data by the end of mission via cable communication link back to the surface. Robot MULEs are intended for hibernation at the mission end, stopping at the extent of their traverse in the cave. They are to be revived and repowered for use in subsequent human reconnaissance missions. The ConOps is notionally illustrated in Figure 6.

Figure 6. Tandem MULE ConOp for extending range of cave exploration.
Download figure:
Standard image High-resolution image5. Site Characterization Objectives
Basic scientific understanding of lunar pits is critical for constraining theories about lava flow thermodynamics and mare emplacement. It is not known whether lunar lava tubes or caves serve as cold traps or reservoirs for the possible accumulation of volatiles, but such potential accumulations—even for more refractory volatiles (e.g., sulfur-bearing minerals)—could yield valuable deposits of water ice. Additionally, a geomorphological investigation is an essential component of site selection because the characterization of the pit, slopes, and landforms is crucial for determining the location of field traverses and approach routes to the pit.
Our science traceability matrix is presented in Table 1. Prior to any construction or emplacement of infrastructure, lunar reconnaissance and site characterization are essential. In order to advance understanding of the origin, setting, and potential utilization of lunar pits, we outline a site characterization program that includes
- 1.remote sensing analysis for reconnaissance and resource assessment (including radar and multi- and hyperspectral data sets);
- 2.in situ sensing;
- 3.mass spectrometry as a sentinel for science;
- 4.regolith and volatile analysis for ISRU assessment; and
- 5.topographical (digital elevation model (DEM) or digital terrain model (DTM)) and morphological characterization.
Site characterization will identify
- 1.mineral resources;
- 2.geomorphologic and surface roughness; and
- 3.terrain and landscape classification to establish slope angles and rock abundance, which are essential for human safety and exploration.
The following sections address key aspects of this program.
Table 1. Science Traceability Matrix for Leto Mission Concept
| Science Objectives | Measurement Objectives | Measurement Requirements | Instruments | Instrument Requirements |
|---|---|---|---|---|
| Remote sensing (including radar) | Regional geology, geographic information system mapping (GIS), and land-use planning for site development | Imaging, high spectral/spatial resolution | Wide-angle imaging, radiometer (microwave or submillimeter from orbit) or thermal emissions spectrometer, high spectral/ spatial resolution atmospheric sounding, side-looking radar (SLR), LiDAR, altimeters | High-resolution imaging on orbit |
| In situ sensing | Exploit ISRU technologies | Microscopic imaging (MI) scale images, composition | Radar (including ground penetrating radar (GPR)), profilers, LiDAR, chemical-scan analyzers | High-resolution imaging in situ |
| Mass spectrometry | Analytical chemistry; gas inventory | High vacuum | Quadrupole mass spectrometer (QMS) (residual gas analyzer) | Commercial off-the-shelf (COTS) |
| Regolith and volatile analysis | Characterization of a lunar regolith simulant | Gas permeability tests, grain size analyses, microscopic imaging (MI) scale images, composition | X-ray diffraction, near-infrared spectroscopy, mass spectroscopy | Development of LCATS-1 general-purpose simulant, feedstock for 3D printing |
| Topographical and morphological characterization | Map 2000 m proximity zone | Multispectral data to map compositional information and radar data to map surface morphology | Radar, fusion of multisensor data | Topographic map with grid cell spacing <1 m (centimeter-scale imaging) |
Download table as: ASCIITypeset image
5.1. Remote Sensing
Remote sensing measurements are the foundation for understanding the regional geology of MHP and other lunar pits that now number in the hundreds (Haruyama et al. 2009; Robinson et al. 2012; Wagner & Robinson 2014, 2015). Table 2 summarizes some available data sets relevant for MHP. The Moon Mineralogy Mapper (M3) spectrometer was launched on board Chandrayaan-1, a lunar orbiter launched by the Indian Space Research Organization (ISRO) on 2008 October 22 (the mission ended prematurely in 2009 August). Its spectral range was from 0.43 to 3.0 μm, and despite the premature mission end, data sets were acquired for 95% of the lunar surface (Green et al. 2011), including the Marius Hills volcanic complex (Besse et al. 2011). Radar soundings by SELENE indicate a massive subsurface void some tens of kilometers in length running westward of MHP (Haruyama et al. 2017). Confirmation of this extended void by LiDAR scans from a probe lowered below surface level into the pit would confirm the existent of this lava tube and provide a deeper understanding of lunar volcanism. LiDAR scans would also collect a 3D point cloud of the pit for modeling its geometry, and evolving gas could be detected by a mass spectrometer (Patrick et al. 2012, 2013).
Table 2. Lunar Data Sets
| Global and Regional Marius Hills Maps | |||||||
|---|---|---|---|---|---|---|---|
| Data | Mission | Spatial Resolution | Source | ||||
| Global mosaic | Lunar Orbiter | 60 m pixel−1 | USGS | ||||
| UVVIS global map (five bands and RBG) | Clementine | 200 m pixel−1 | USGS | ||||
| UVVIS 750 nm filter albedo map | Clementine | 100 m pixel−1 | USGS | ||||
| Temperature map (Diviner radiometer) | LRO (DLRE) | 1/128 deg | PDS | ||||
| Topographic map | LRO (LOLA) | 470 m pixel−1 | PDS | ||||
| GLD100 WAC global DEM | LRO | 100 m pixel−1 | Arizona State Univ. | ||||
| Synthetic aperture radar | LRO Mini-RF | 15–30 m pixel−1 | PDS | ||||
| Moon Mineralogy Mapper (M3) | Chandrayaan-1 | 70–150 m pixel−1 | ISRO/PDS | ||||
| TiO2 global distribution map | Clementine | 100 m pixel−1 | USGS, Lucey et al. (2000a) | ||||
| FeO global distribution map | Clementine | 100 m pixel−1 | USGS, Lucey et al. (1998) | ||||
| Marius Hills DEM from NAC Frames | |||||||
| Lat/Lon | rms Error | No. Stereo Pairs | Total Coverage (km2) | Source | |||
| 14° N, 304° E | 3.80 | 3 | 388 | USGS | |||
| Marius Hills Pit Select LROC NAC Images | |||||||
| Image | Slew Angle (°) | Incidence Angle (°) | |||||
| M122584310L | 0.00 | 28.08 | |||||
| M114328462R | 6.80 | 61.38 | |||||
| M133207316L | 29.13 | 82.84 | |||||
| M137929856R | 42.86 | 33.79 | |||||
| M155607349R | 8.69 | 12.52 | |||||
| Marius Hills Select Gravity (GRAIL) | |||||||
| Calibrated Data Record | Instrument | ||||||
| 5214_MED_RES | Lunar Orbiter 80 MM Focal Length Camera | ||||||
Download table as: ASCIITypeset image
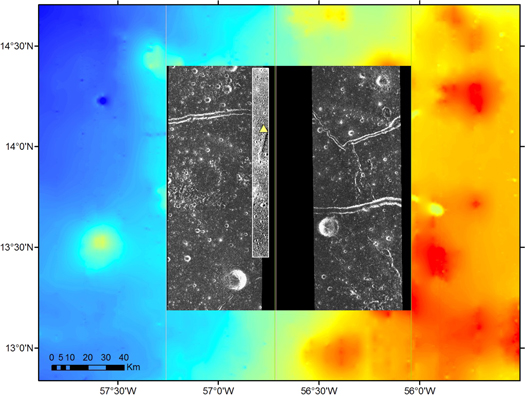
Figure 7 is a co-registered image composite for initial spectral and topographic analyses. Spectral and topographic analyses of MHP would utilize multiple data sets (e.g., high-resolution and color imaging, laser altimetry, radar mapping, temperature mapping, and mineral mapping) to (i) characterize the style of regional volcanism, (ii) characterize geomorphologic features and regolith properties as key to understanding the potential for ISRU, and (iii) understand the suitability of MHP as a potential landing site or base site for robotic and human exploration. We can interpret the spectral response seen in lunar color ratio images in terms of their composition and maturity. For example, Lucey et al. (1998, 2000a, 2000b) created algorithms for producing FeO and TiO2 maps. The mare units of Marius Hills are interpreted to have relatively higher titanium contents compared to other lunar mare (Lucey et al. 1998; Weitz & Head 1999; Lucey et al. 2000a).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 7. Remote sensing database demonstration for the MHP (location marked by a yellow triangle). A high-resolution LROC panchromatic image (thin data strip) is on top, a mosaic of two filtered and processed Mini-RF images is below (the lateral image extents are shown by thin lines), and the background image is the LOLA DEM. While most data co-registration steps were successful, the SAR data (Mini-RF) exhibit various distortions. For example, the left image is translated to the north, but the right image is rotated or scaled differently. The SAR metadata indicate that they were acquired (i) on different dates, (ii) at large incidence angles, and (iii) in different modes (ascending/descending). Data were obtained from the PDS Geoscience Node.
Download figure:
Standard image High-resolution image{kind=link}
The LRO has the instrument payload most relevant for essential spectral and topographic analyses. The Lunar Orbiter Laser Altimeter (LOLA) provides a precise global lunar topographic model and geodetic grid that serves as the foundation for lunar elevation assessments (Smith et al. 2007). The LROC consists of two NACs to provide 0.5–2.0 m scale panchromatic images of a 5 km swath and the Wide Angle Camera (WAC) to provide images at a pixel scale of 100 m in seven color bands over a 60 km swath (e.g., Robinson et al. 2010; Scholten et al. 2012). The NAC was not designed as a stereo system but obtains stereo pairs through images acquired from two orbits. LROC NAC right and left image pairs can be orthographically corrected and mosaicked to create DEMs (Tran et al. 2010; Burns et al. 2012). The Diviner Lunar Radiometer Experiment (DLRE) is a nine-channel push-broom mapping radiometer that observes the emitted thermal radiation (seven channels) and reflected solar radiation (two channels) between 0.3 and 400 μm at a spatial resolution of approximately 160 × 320 m from the 50 km nominal mission orbit (Paige et al. 2010). Diviner data can provide information about contrasting thermophysical properties between rocks and regolith fines, the areal fraction of rocks on the lunar surface, and bulk silicate mineralogy (Bandfield et al. 2011). Meyer & Hurtado (2011, 2012) describe a possible method to detect subsurface lunar lava tubes using DLRE thermal inertia data. The LRO Miniature Radio Frequency (Mini-RF) instrument uses a hybrid polarimetric architecture to measure the lunar surface backscatter characteristics and is discussed in detail in Nozette et al. (2010).
5.2. In Situ Sensing
Many other scientific objectives could also be accomplished by such an in situ exploration of MHP, including characterization of past lava emplacement, the paleo-regolith, and rubble-pile composition using infrared laser spectrometry. Optical and X-ray spectrometry techniques will measure differences between the subsurface paleo-regolith and local surface regolith, while rubble-pile imagery will provide data for collapse modeling. Other investigations would include experiments in determining subsurface radiation dosage and dust particle impacts, as well as wall temperature measurements for informing thermal conductivity models.
Understanding the mechanical properties of the lunar regolith is important for ISRU and development of architectural habitability concepts, such as using regolith as feedstock for 3D printing of structures or enclosing a lunar skylight pit with a pressurized dome (Patrick et al. 2014). This would help address the question of whether a lunar skylight can be pressurized to make it habitable. An intuitive approach of merely placing a dome cap over the skylight pit is fraught with several issues, including gaseous diffusion, bedrock fracturing, and a desiccated regolith.
5.3. Mass Spectrometry as a Sentinel for Science
The commercial off-the-shelf (COTS) quadrupole mass spectrometer (QMS) residual gas analyzer has become an important tool for monitoring the cleanliness of vacuum systems and conducting analytical chemistry during laboratory processes. The QMS can be considered as two main subsystems: gas handling and the analyzer. The analyzer is the QMS, which can only operate in high vacuum. This type of QMS belongs to a class referred to as a residual gas analyzer (RGA). Due to its small footprint, size, and cost, the RGA has made monitoring of background gases over a large mass range (1–300 Da) commonplace in the lab.
Gas studies at the lunar surface began with the Cold Cathode Gauge Experiment (CCGE) deployed during Apollos 12, 14, and 15 (Johnson & Evans 1974). Operation of the Apollo 12 CCGE in 1969 November revealed landing site contamination that not only saturated that gauge for hours but also recorded pressure signatures associated with the depressurization of the Lunar Module cabin (Johnson et al. 1970) and saturation of the gauge by undergarment coolant water from an astronaut backpack (Patrick & Mandt 2016). Recent laboratory results in lunar simulants suggest that more volatiles are released from mechanical grain-on-grain contact than from disturbances caused by illumination (Patrick et al. 2015). In addition to site contamination resulting from spacecraft fuel combustion by-products and outgassing equipment, experiments simulating disturbance of lunar regolith suggest that detectable quantities of native gases are released by mechanical disturbances from wheels, drills, probes, and astronaut footfalls. Consequently, we know of no better method for probing the lunar surface environment than with the in situ analytical chemistry capability of mass spectrometry, and we assert it to be the only suitable means to characterize native gas signatures under such ultra–high-vacuum (UHV) conditions in order to deconvolve these from artificial sources during the coming lunar surface campaigns for both exploration and ISRU.
Mass spectrometry aboard spacecraft has a decades-long record of success in the analytical chemistry of planetary atmospheres. From the atmospheric explorers of our terrestrial atmosphere (Burgess & Torr 1987) to investigations of Venus (Hoffman et al. 1979; Niemann et al. 1980), Mars (Stern et al. 2015), Jupiter (Niemann et al. 1996), and the Saturnian system (Niemann et al. 2010; Teolis et al. 2017; Waite et al. 2018), mass spectrometry has identified both major gases and trace components in planetary atmospheres. Mass spectrometry in lunar environments began with the Lunar Orbital Mass Spectrometer Experiment aboard the Apollo 15 (1971) and 16 (1972) Command Service Modules (Hoffman et al. 1972). More recently, the Lunar Atmosphere and Dust Environment Explorer (LADEE) probed the lunar exosphere from orbit for 6 months (2013–2014) with its Neutral Mass Spectrometer (NMS) and detected elevated signatures for water vapor and carbon dioxide during periods of known micrometeoroid streams (Benna et al. 2014). However, as of this date, the only mass spectrometer deployed to the lunar surface was the Lunar Atmospheric Composition Experiment (LACE) deployed during Apollo 17 in 1972 December. That instrument identified radiogenic argon (40Ar) in the lunar exosphere, as well as contaminants from the landing site (Hoffman et al. 1973).
At the lunar surface, 40Ar has been measured and arises as a result of the decay of 40K (τ1/2 = 1.28 × 109 yr) in lunar rock. This major component of the lunar exosphere was first measured at the Apollo 17 landing site in 1972 December (Hodges et al. 1974; Hodges 1975). A QMS similar to a COTS RGA would not only cover the known subsurface evolution of the native radiogenic 40Ar but also monitor the emission of any heavier gas molecules that may yet be discovered. These would have been beyond the limited mass range of LACE deployed during Apollo 17, and such instrumentation would also serve the important duty of monitoring artificial contamination from spacecraft thrusters, human life-support systems, and deployed equipment, in addition to the aforementioned native gas inventory released owing to mechanical disturbance of the lunar surface by tools and equipment for resource exploration and prospecting.
Such an in situ mission to MHP would not only offer decadal survey-level science (NRC (National Research Council) 2007, 2011) but also provide a stepping-stone "reference mission" for essential engineering and technology development in the human exploration of the Moon (Dorrington et al. 2018). In the absence of space weathering processes that deplete or completely destroy local concentrations of 40Ar and other volatiles in the upper layers of lunar regolith, it is not inconceivable that the concentration of Ar and more refractory volatiles (e.g., P, Na, K, Zn, Hg, and S) is enhanced within walls, pockets, or cold traps deep within lunar lava tubes where there may be the accumulation of volatiles (Watson et al. 1961; Arnold 1979; Pieters et al. 2009; Haruyama et al. 2011). These eons-old deposits may provide markers of the paleocosmic record and in an environment wholly undisturbed by any aeolian forces, plate tectonics, or biome.
5.4. Regolith and Volatile Analysis for ISRU Assessment
Understanding lunar regolith permeability and flow characteristics is important for the possible recovery and utilization of water. Studies testing various lunar simulants with advanced instrumentation setups have investigated gaseous permeability of the simulants for this water recovery (Toutanji et al. 2012). Other lunar events involving gas exchange processes at the lunar surface, such as the flow of rocket engine exhaust into the lunar soil and the potential for contamination of regolith by rockets (Clegg & Jolliff 2012; Clegg et al. 2014), also have inspired investigations using increasingly sophisticated apparatuses for testing lunar simulants, such as JSC-1A (Johnson Space Center; LaMarche et al. 2011).
An initial series of permeability tests conducted by our team with JSC-1A lunar soil simulant demonstrated that significant permeation of gases and fluids takes place in laboratory conditions that were designed to be analogous to the lunar surface (Patrick et al. 2013, 2014, 2015; Necsoiu et al. 2018; Patrick et al. 2019). There also are limits to the analogy our experiment represents with respect to the lunar surface. When vacuum is drawn on the low-pressure side of the simulant volume, not only is this downstream volume being evacuated, but so are the entrained atmospheric gases within the simulant.
Regolith simulant research is necessary to quantify geomechanical properties and is an important component of ISRU technologies, including 3D printed manufacturing for habitat design and planetary construction. To help satisfy the growing demand for simulants in the space industry, we have developed a general-purpose lunar regolith simulant called LCATS-1, named for the Lunar Caves Analog Test Sites program and introduced in Hooper et al. (2020). LCATS is a Space-STEM program, described in Hooper et al. (2017), Ximenes (2019), and Ximenes et al. (2019, 2020), that uses robotic technologies and terrestrial analogs in a lunar mission context. Other components of LCATS include the lunar dust environment and ISRU technologies for regolith simulant research and manufacturing for habitat design and planetary construction.
5.5. Topographical and Morphological Characterization
The spectral properties and morphometry of the lava flows, domes, and related volcanic landforms in the Marius Hills region can be used to determine whether they are distinct from the mare and whether these differences could be used to learn more about the volcanic activity that emplaced the landforms and features. In general, multispectral data are used to map compositional information, while radar data are used to map surface morphology. The inherent characteristics of radar systems make them especially valuable for terrain analyses involving texture, shape, and topographic relief. Surface roughness has the most important influence on the radar return signal amplitude because it controls the extent of backscatter.
Mapping an area using a fusion of multisensor data provides the additional benefit of mixing a variety of remote sensing data types. Using digital topographic data sets, volcanic landforms, impact craters, fault scarps, and landslides can be assessed qualitatively and quantitatively in order to understand the rates and timescales over which different landscapes develop and evolve (Hooper 2001, 2002; Hooper et al. 2002, 2003; Necsoiu & Hooper 2009a; Necsoiu et al. 2009b; Hooper & Smart 2012, 2013).
In the case of a green approach to landing zone site selection, geomorphological mapping of natural formations of surrounding domes informs how these protective features can be optimized by serving as barriers for keeping pit and cave entrances protected from contamination of ejecta and blast plumes from visiting landers. Pozzobon et al. (2021) report that the MHP surroundings are not affected by obstacles such as boulders and offer favorable trafficability. The landing should be sufficiently safe in terms of engineering constraints with slopes <10° in most of the neighboring pit area with the exception of restricted zones surrounding a limited number of impact craters and nearby depressions and rille walls. Achieving a detailed analysis of the terrain and topography provides a valuable tool in assessing a suitable landing site for the first precursor robotic missions and in situ scientific investigations of the lunar pit. We suggest that such mapping begin within a 2000 m proximity zone surrounding the pit. Initially, and with respect to a green reconnaissance approach, the exploration footprint would be limited. However, with landing site maturity, the exploration footprint should be expanded to 15 km × 15 km, which agrees with the 13 candidate landing regions for Artemis III announced by NASA in 2022 August for the lunar south pole.
6. Impact
It is critical for first entry to be performed in a manner that preserves the pristine pit environment. The mission objective is to gain an understanding of pit and cave characteristics for suitability as a refuge for future habitation and birth of a lunar settlement.
Deployment of a zip line is conducive to a concept of operations for site characterization of pit openings and prevents contamination of the pit from plume and fuel of a lander flyover or other intrusive robotic activity trying to traverse down the cliff walls. The zip line lowers down instruments/equipment from the center of the pit opening for 360°-field-of-view LiDAR measurements for a 3D point cloud of the entire pit. Science investigations, site contamination mitigation, and initial infrastructure buildup of the site are all accomplished with the initial zip line science reconnaissance mission, essentially providing the first infrastructure emplacement at the site for an eventual outpost.
Based on previous successful use of space flight mass spectrometry—from lunar orbit and at the lunar surface—combined with recent laboratory results and gas detection at the lunar poles, we believe that deployment of mass spectrometry in lunar cave environments is essential for characterizing these environments for science, exploration, and ISRU.
7. Modeling, Animation, and Future Work
As illustrated in Figure 5, we have created interpretations of the pit edges and slopes for animating the MHP mission concept (Ximenes & Shaffer 2020). This 2-minute video was produced illustrating the mission profile as developed to date. Pit diameter, size, and depth are accurately modeled. Work in progress further develops the concept with new animations of how the MULE robot enters the cave and maintains power and communications while in the cave. A detailed science traceability matrix to determine the necessary instruments that will be fitted to MULEs is provided in Table 3. Preliminary mass/volume breakdowns and budgets for instruments on MULEs are being developed to determine whether the MULE robots can traverse the lunar surface with different instruments on board. A field test in a local Texas cave using a Boston Dynamics Spot robot with mounted LiDAR and various instrumentation has been planned, and we will report the results in the future.
Table 3. Science Traceability Matrix for MULE Robot
| Goal | Objective | Measurement Requirements | Instrument Performance Requirements | Projected Instrument Performance | Mission Requirements (Top Level) | |
|---|---|---|---|---|---|---|
| Physical Parameters | Observables | |||||
| Instrumented MULE robot to traverses the lunar surface | Operate MULE on the lunar surface | Dynamic balance, robust, data collection capability, software integration for multiple operations | Mobility and autonomy | Maximum step height (30 cm) and slope (30°) a | 32 kg robot/14 kg payload a | Navigation and mobility |
| Sensing—camera and LiDAR | Image and topographic analysis of pit interior | Camera with integrated thermal band (visual to thermal); LiDAR | Imagery and topography | Database, cloud infrastructure, LiDAR in near-infrared (750 nm to 1.5 μm) | Camera system (6.5 kg) and LiDAR (1.6 kg) a | Sensing |
| Mass spectrometry | Regolith and volatile analysis—composition of chemical substances by accurately measuring their molecular masses | Three components: ion source, mass analyzer, and detector | Vacuum, gas, plasma, and surface science | Residual gas analyzer | 4 kg | Analytical chemistry |
Note.
a Boston Dynamics (http://www.bostondynamics.com/).Download table as: ASCIITypeset image
8. Conclusion
By developing MHP as a framework for planetary cave research, we will improve the community's understanding of lava tube pits and other sublunarean voids. Volatile flux, lunar volcanism, regolith processes, and the dust environment encompass science concepts and goals identified within the guiding documents by the Lunar Exploration Analysis Group (LEAG (Lunar Exploration Analysis Group) 2017) and the National Research Council (NRC (National Research Council) 2007, 2011). Detailed geologic analysis and mapping can identify mineralogical resources, ore bodies, or an accumulation of volatiles in the vicinity of or within the pit or void. The commercial and habitation potential of the site becomes increasingly attractive if a prospective mining operation can be justified for the region.
We select MHP as a site for investigation and endorse it as a "reference mission" because of its volcanic setting, proximity to the lunar equator, availability of spacecraft data, and relative size for understanding the complexity of engineering challenges for accessing these types of pits. The discovery of this pit, as well as other sublunarean voids on the Moon, provides compelling motivation for robotic and eventual human exploration missions to these sites for in situ investigations and site assessments to determine viability for long-term habitation and utilization of lunar resources. New technologies necessary for exploring planetary caves will benefit other fields of planetary research.
We propose the novel concept of green reconnaissance. This includes entering lunar lava tubes, caves, skylights, and pits in a nondisturbing way that preserves any primeval, unspoiled features. Before entering a pit for the first time, an effort needs to be made to understand the geomorphology of the pit edges, slope approaches, and surrounding regolith characteristics to help with determining optimum ingress/egress techniques in order to maintain a philosophy of minimizing site disturbance and contamination while getting instruments and robots down the pit for investigative science.
Finally, cave research is interdisciplinary by its very nature, and exploration of sublunarean voids may fuse elements of geology, chemistry, hydrology, solar physics, and microclimatology. While lunar caves may provide safety and shelter for the first human settlers, they may ultimately prove to be a stepping stone for future planetary exploration.
LCATS (Lunar Caves Analog Test Sites) material discussed in this paper is based on work supported by NASA under award No. NNX16AM33G. Opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Aeronautics and Space Administration. We acknowledge the patience and comments from anonymous reviewers that helped improve earlier versions of this manuscript.