



Abstract
The pairwise collisional growth of dust aggregates consisting of submicron-sized grains is the first step of planet formation, and understanding the collisional behavior of dust aggregates is therefore essential. It is known that the main energy dissipation mechanisms are the tangential frictions between particles in contact, namely, rolling, sliding, and twisting. However, there is great uncertainty for the strength of rolling friction, and the dependence of the collisional growth condition on the strength of rolling friction was poorly understood. Here we performed numerical simulations of collisions between two equal-mass porous aggregates with various collision velocities and impact parameters, and we also changed the strength of rolling friction systematically. We found that the threshold of the collision velocity for the fragmentation of dust aggregates is nearly independent of the strength of rolling friction. This is because the total amount of the energy dissipation by the tangential frictions is nearly constant even though the strength of rolling friction is varied.

Original content from this work may be used under the terms of the Creative Commons Attribution 4.0 licence. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
The first step of planet formation is the pairwise collisional growth of dust aggregates consisting of submicron-sized grains (e.g., Wurm & Teiser 2021). Therefore, understanding the condition for collisional growth of dust aggregates is essential.
The collisional behavior of dust aggregates has been studied extensively, by using both laboratory experiments (e.g., Blum & Wurm 2008; Fritscher & Teiser 2021; Schräpler et al. 2022) and numerical simulations (e.g., Wada et al. 2009; Hasegawa et al. 2021; Umstätter & Urbassek 2021a). It is known that the threshold collision velocity for the fragmentation of dust aggregates, vfra, depends on the strength of interparticle forces acting on constituent particles in contact.
The stickiness of dust particles has been investigated in a large number of studies (e.g., Güttler et al. 2012; Tanaka et al. 2012; Gundlach & Blum 2015). These studies found that the threshold velocity for the sticking in a head-on collision of individual dust particles is several times higher than that predicted for perfectly elastic spheres. Arakawa & Krijt (2021) concluded that the viscous dissipation for the normal motion would play a critical role in the collision between micron-sized water-ice particles.
Recently, Arakawa et al. (2022) performed numerical simulations of collisions between two equal-mass dust aggregates consisting of submicron-sized spherical ice particles. Surprisingly, they found that the main energy dissipation mechanism was not the viscous dissipation but the friction between particles in contact. Interparticle frictions are caused by tangential motions, and there are three types of tangential motions: rolling, sliding, and twisting (see Figure 2 of Wada et al. 2007). Therefore, we can imagine that the collisional behavior of dust aggregates would be affected by the strength of interparticle frictions.
The rolling friction is one of the strongest energy dissipation mechanisms. The interparticle rolling motion behaves elastically (i.e., without energy dissipation) when the length of the rolling displacement, ξ, is smaller than the critical rolling displacement, ξcrit (e.g., Dominik & Tielens 1995; Wada et al. 2007). The energy dissipation starts when ξ exceeds ξcrit.
As the interparticle rolling friction is the dominant mechanism for the energy dissipation within colliding dust aggregates, we can expect that the collisional outcome of dust aggregates must depend on ξcrit; however, it is poorly understood how large ξcrit is for micron-sized spheres. Dominik & Tielens (1995) constructed the theoretical model of rolling based on the contact theory developed by Johnson et al. (1971). They mentioned that ξcrit should be of the order of the distance between atoms in the materials, and it is typically 0.2 nm. In contrast, Heim et al. (1999) measured the rolling friction torques between individual silica microspheres by using an atomic force microscope. They found, however, that the critical rolling displacement for silica microspheres with radii between 0.5 and 2.5 μm would be ξcrit = 3.2 nm, which is 16 times larger than Dominik & Tielens (1995) assumed. We note that the upper limit of ξcrit would be given by the contact radius of spheres at the equilibrium state, a0, and ξcrit = 3.2 nm is still smaller than a0.
Krijt et al. (2014) modified the analytical theory for the rolling friction based on the concept of adhesion hysteresis, and they reported that ξcrit would be given by ξcrit ∼ a0/24 for silica microspheres when the crack propagation rate is 1–10 μm s−1. Recently, Umstätter & Urbassek (2021b) performed molecular dynamics simulations of amorphous Lennard-Jones grains and confirmed that ξcrit depends on both the material parameters and the angular velocity for rolling.
Although the rolling friction is one of the main energy dissipation mechanisms for oblique collisions between dust aggregates, dependence of the collisional growth condition on ξcrit is poorly understood. Wada et al. (2008) performed numerical simulations of head-on collisions between dust aggregates with various ξcrit. They used highly porous dust aggregates prepared by ballistic cluster–cluster aggregation in their simulations, and they investigated the condition for collisional compression and fragmentation. They reported that both the onset of collisional compression and the maximum compression linearly depend on ξcrit, but the size of the largest fragment formed after a collision is nearly independent of ξcrit. These results would be naturally explained by the findings that the collisional compression is caused by interparticle rolling motions while the energy dissipation is primarily caused by the connection and the disconnection of particles (Wada et al. 2009). We note, however, that they focused on head-on collisions and did not study collisional behavior for oblique collisions. Suyama et al. (2008, 2012) also investigated the collisional compression of dust aggregates by sequential collision simulations, but they also focused on head-on collisions.
In this study, we report the results from numerical simulations of collisions between two equal-mass dust aggregates with various collision velocity and impact parameters. We changed the strength of the interparticle rolling friction systematically, which is controlled by ξcrit. Surprisingly, we found that the threshold collision velocity for the fragmentation of dust aggregates is nearly independent of ξcrit when we consider oblique collisions.
2. Model
We performed three-dimensional numerical simulations of collisions between two equal-mass dust aggregates. The numerical code used in this study is identical to that developed by Arakawa et al. (2022), which considered the viscous drag for normal motion and also considered friction torques for tangential motions.
2.1. Material Parameters
We assumed that the dust particles constituting dust aggregates are made of water ice, and all particles have the same radius of r1 = 0.1 μm. The material parameters of water-ice particles used in this study are listed in Table 1. The particle interaction model is identical to that used in Arakawa et al.(2022).
Table 1. List of Material Parameters Used in This Study (see Arakawa et al. 2022)
| Parameter | Symbol | Value |
|---|---|---|
| Particle radius (μm) | r1 | 0.1 |
| Material density (kg m−3) | ρ | 1000 |
| Surface energy (mJ m−2) | γ | 100 |
| Young's modulus (GPa) | 7 | |
| Poisson's ratio | ν | 0.25 |
| Viscoelastic timescale (ps) | Tvis | 6 |

Download table as: ASCIITypeset image
2.2. Interparticle Rolling Motion
In this study, we regarded ξcrit as a parameter. We applied a linear spring model with a critical displacement to the interparticle rolling motion (Wada et al. 2007). When the length of the rolling displacement is ξ, the potential energy stored by the rolling displacement is given by

and the spring constant, kr, is given by

Here Fc = 3π γ R is the maximum force needed to separate the two particles in contact, and R = r1/2 is the reduced particle radius. The critical energy required to start rolling, Er,crit, is given by

Wada et al. (2007) introduced Eroll as the energy needed to rotate a particle by a π/2 radian around its contact point, which is given by

Figure 1 shows the dependence of Er,crit and Eroll on ξcrit. We normalized Er,crit and Eroll by Fc δc, where δc is the critical stretching length for particle separation, which is given by

The contact radius of spheres at the equilibrium state, a0, is given by

where is the reduced Young's modulus.
![${{ \mathcal E }}^{* }={ \mathcal E }/[2(1-{\nu }^{2})]$](https://content.cld.iop.org/journals/0004-637X/939/2/100/revision1/apjac96e1ieqn2.gif)

Figure 1. Dependence of Er,crit and Eroll on ξcrit.
Download figure:
Standard image High-resolution imageThe energy needed to break a contact in the equilibrium by the quasistatic process, Ebreak, is given by

The blue horizontal line shown in Figure 1 represents Ebreak. We found that Ebreak > Er,crit when ξcrit ≤ 3.2 nm. Not only the potential energy related to the normal compression but also the potential energies stored by the tangential displacements dissipate when two particles separate. However, the contribution of the rolling displacement is negligible for ξcrit ≤ 3.2 nm. In addition, Arakawa et al. (2022) confirmed that contributions of sliding and twisting displacements also play a minor role; they are one order of magnitude smaller than Ebreak.
The collision velocity of two dust aggregates is vcol, and the initial kinetic energy per one particle with the velocity of vcol/2 is

where is the mass of each particle. Therefore, Eroll ≫ Ekin,1 for ξcrit ≫ 3.2 nm and vcol ≪ 50 m s−1, and the collisional deformation of dust aggregates due to rolling motion would be suppressed for large ξcrit and/or small vcol cases.

2.3. Initial Condition
As the initial condition, we use the two dust aggregates prepared by ballistic particle–cluster aggregation. These aggregates are identical to those used in Arakawa et al. (2022). The number of particles constituting the target aggregate, Ntar, is equal to that for the projectile aggregate, Npro, and Ntar = Npro = 50000. The total number of particles in a simulation, Ntot, is Ntot = Ntar + Npro = 105.
Offset collisions of two dust aggregates are considered. We use the normalized impact parameter, Boff (see Arakawa et al. 2022). The square of the normalized impact parameter ranges from to 1 with an interval of 1/12. The collision velocity of the two dust aggregates is set to vcol = 10(0.1i) m s−1, where i = 13, 14, ..., 20. We also change ξcrit that controls the strength of the interparticle rolling friction. We set ξcrit = 0.2 × 2j nm, where j = 0, 1, ..., 6; the parameter range of ξcrit satisfies 0.2 nm ≲ ξcrit ≲ a0.

3. Examples of Collisional Outcomes
Figure 2 shows the snapshots of the collisional outcomes. Here we show the results for vcol = 39.8 m s−1 and . We found that the collisional behavior is similar among different settings of ξcrit as shown in Figure 2. We also analyzed the number of constituent particles in each fragment at the end of the simulation, t = 7.99 μs. The numbers of constituent particles in the three largest remnants are (Nlar, N2nd, N3rd) = (34042, 33299, 29827) for ξcrit = 0.2 nm, (34170, 32457, 30940) for ξcrit = 0.8 nm, (32571, 31598, 29338) for ξcrit = 3.2 nm, and (48491, 31900, 19003) for ξcrit = 12.8 nm, respectively. For these cases, most of the particles are included in the three largest remnants.


Figure 2. Snapshots of the collisional outcomes. Here we set vcol = 39.8 m s−1 and . Panels (a)–(d) are the time series of snapshots for ξcrit = 0.2 nm, 0.8 nm, 3.2 nm, and 12.8 nm, respectively. The time interval for each snapshot is 0.40 μs.

Download figure:
Standard image High-resolution image4. Growth Efficiency
We discuss the parameter dependence of the largest fragment formed after a collision. The collisional growth efficiency, fgro, is defined as follows (e.g., Wada et al. 2013):

Figure 3 shows the collisional growth efficiency for different settings of ξcrit, Boff, and vcol. Panels (a)–(d) show the results for ξcrit = 0.2 nm, 0.8 nm, 3.2 nm, and 12.8 nm, respectively. For head-on collisions with , fgro ≃ 1 when 20 m s−1 ≤ vcol ≤ 100 m s−1, and for grazing collisions with , fgro ≃ 0. These trends are consistent with those observed in previous studies (e.g., Hasegawa et al. 2021; Arakawa et al. 2022).



Figure 3. Collisional growth efficiency, fgro, for different settings of ξcrit, Boff, and vcol.
Download figure:
Standard image High-resolution imageWe note that Schräpler et al. (2022) proposed a model for collisions between porous dust aggregates based on their experimental results. In their model, head-on collisions of porous aggregates result in bouncing when the collision velocity exceeds the sticking threshold, and the sticking threshold decreases with increasing ξcrit. However, we have never seen bouncing behavior for head-on collisions even though ξcrit is varied. Although the real reason is unclear, this discrepancy might originate from the difference in the radius and/or the structure of aggregates; the radius of dust aggregates used in this study is approximately 7 μm, while Schrapler et al. (2022) used centimeter-sized aggregates.
The impact parameter must vary with each collision event in protoplanetary disks. Then the average value of fgro weighted over Boff would be useful to investigate whether dust aggregates can grow into larger aggregates in protoplanetary disks. The average value of fgro weighted over Boff is given by

The gray lines in Figure 3 are the Boff-weighted collisional growth efficiency, 〈fgro〉. As 〈fgro〉 decreases with increasing vcol, the threshold collision velocity for the fragmentation of dust aggregates, vfra, is defined as the velocity where 〈fgro〉 = 0. We found that vfra is nearly independent of ξcrit; 50 m s−1 ≤vfra ≤ 60 m s−1 for 0.2 nm ≤ ξcrit ≤ 12.8 nm.
Figure 4(a) shows the Boff-weighted collisional growth efficiency. Although 〈fgro〉 slightly depends on ξcrit when we set 20 m s−1 ≤ vcol ≤ 30 m s−1, vfra is nearly independent of ξcrit in our simulations. Figures 4(b)–4(d) show the collisional growth efficiency for oblique collisions. As shown in Figures 4(c) and 4(d), for grazing collisions with , fgro is nearly independent of vcol around vfra. In contrast, Figure 4(b) exhibits a clear dependence of fgro on vcol around vfra if we focus on oblique collisions with . Therefore, we can imagine that the energy dissipation for oblique collisions with and its dependence on vcol would be the key to unveiling the ξcrit dependence of 〈fgro〉 and vfra.




Figure 4. Boff-weighted collisional growth efficiency (panel (a)) and collisional growth efficiency for oblique collisions ( for panel (b), for panel (c), and for panel (d)).



Download figure:
Standard image High-resolution image5. Energy Dissipation
We check the energy dissipation due to particle interactions from the start to the end of the simulations. Figure 5 shows the energy dissipation due to rolling friction (Edis,r), sliding friction (Edis,s), twisting friction (Edis,t), connection and disconnection of particles (Edis,c), and viscous drag force (Edis,v). We also show the total energy dissipation due to all particle interactions, Edis,tot ≡ Edis,r + Edis,s + Edis,t + Edis,c + Edis,v. Here we set and investigated the dependence on ξcrit and vcol. Results for and 9/12 are shown in the Appendix as a reference (see Figures 6 and 7). The particle interaction energies for interparticle motions (e.g., Er,crit and Eroll) are summarized in Table 2 of Arakawa et al. (2022).



Figure 5. Total energy dissipation due to particle interactions from the start to the end of the simulations. The total energy dissipation due to all particle interactions, Edis,tot, is given by Edis,tot ≡ Edis,r + Edis,s + Edis,t + Edis,c + Edis,v, where Edis,r, Edis,s, Edis,t, Edis,c, and Edis,v are the energy dissipations due to rolling friction, sliding friction, twisting friction, connection and disconnection of particles, and viscous drag force, respectively. Here we set .

Download figure:
Standard image High-resolution image
Figure 6. Same as Figure 5 but with .

Download figure:
Standard image High-resolution image
Figure 7. Same as Figure 5 but with .

Download figure:
Standard image High-resolution imageWe found that Edis,r does not monotonically increase with ξcrit; there is a maximum value of Edis,r. It is clear that Edis,r → 0 when ξcrit → 0 because Eroll becomes zero. It is also natural that Edis,r → 0 when ξcrit → ∞ ; this is because the critical energy required to start rolling becomes Er,crit → ∞ . Although it depends on vcol, Edis,r takes the maximum around ξcrit ≃ 3.2 nm for vcol ∼ vfra. As the kinetic energy per one particle, Ekin,1, cannot overcome Eroll for vcol ∼ vfra and ξcrit ≫ 3.2 nm, the decrease of Edis,r for the large ξcrit would be consistent with the order of magnitude estimated in Section 2.2.
In contrast to Edis,r, Edis,s and Edis,t take large values for both the lower and the upper limits of ξcrit (i.e., 0.2 nm and 12.8 nm, respectively). For low-speed collisions with vcol ≲ vfra, Edis,t plays the major role in energy dissipation when ξcrit is set to be close to the lower or the upper limits. For high-speed collisions with vcol ≳ vfra, Edis,s plays the major role in the energy dissipation when ξcrit is set to be close to the lower or the upper limits. Conversely, Edis,r is the strongest energy dissipation mechanism when we choose a moderate ξcrit in the range of 0.8–3.2 nm for submicron-sized ice particles.
The strong dependence of Edis,s on vcol is discussed in Section 5.2 of Arakawa et al. (2022). They claimed that the strong dependence could be originated from the magnitude relation between Eslide and Ekin,1, where Eslide is the the energy needed to slide a particle by a π/2 radian around its contact point.
Interestingly, the total energy dissipation due to all particle interactions, Edis,tot, is nearly independent of ξcrit. 4 In other words, our numerical results suggest that three mechanisms of tangential frictions could complement one another. The weak dependence of Edis,tot on ξcrit might be the reason why 〈fgro〉 and vfra are not strong functions of ξcrit. As we prepared the initial dust aggregates via sequential hit-and-stick collisions between an aggregate and multiple single particles (e.g., Mukai et al. 1992), they are highly porous and have only two interparticle contacts per particle on average. Therefore, we can expect that there are higher degrees of freedom for the deformation of dust aggregates, and all three tangential motions (rolling, sliding, and twisting) can potentially play a prominent role in the energy dissipation if the strengths of the springs and their critical displacements have moderate values. We note that 〈fgro〉 and vfra considerably decrease when we perform numerical simulations of collisions between aggregates made of cohesive but frictionless spheres (S. Arakawa et al., in preparation). Although what controls the balance of energy dissipation via tangential frictions is still unclear, our results highlight the importance of three tangential motions on the collisional outcomes of porous dust aggregates made of submicron-sized particles.
6. Summary
The pairwise collisional growth of dust aggregates consisting of submicron-sized grains is the first step of planet formation, and understanding the collisional behavior of dust aggregates is therefore essential. It is known that the main energy dissipation mechanisms are the tangential frictions between particles in contact, namely, rolling, sliding, and twisting (e.g., Arakawa et al. 2022). However, there is great uncertainty for the strength of rolling friction, and the dependence of the collisional growth condition on the strength of rolling friction was poorly understood.
In this study, we systematically performed numerical simulations of collisions between two equal-mass dust aggregates made of submicron-sized ice spheres. We changed the strength of interparticle rolling friction, which is controlled by the critical rolling displacement, ξcrit. As a result, we found that the threshold collision velocity for the fragmentation of dust aggregates is nearly independent of ξcrit when we consider oblique collisions (Figures 3 and 4).
We checked the total energy dissipation due to particle interactions from the start to the end of the simulation (Figure 5). We found that the total energy dissipation due to all particle interactions, Edis,tot, is nearly independent of ξcrit. The energy dissipation due to rolling friction, Edis,r, takes the maximum when we chose a moderate ξcrit, while Edis,r becomes small if ξcrit is set to be close to the lower or the upper limits (0.2 nm and 12.8 nm, respectively). Conversely, the energy dissipations due to sliding friction, Edis,s, and twisting friction, Edis,t, become large at both the lower and the upper limits of ξcrit. Therefore, our numerical results indicate that three mechanisms of tangential frictions could complement one another.
Numerical simulations of granular matter are performed in many fields of science and engineering. We note, however, that the particle interaction models differ among numerical codes. Although the majority of these codes do not include the particle interaction for the twisting motion, our simulations showed that twisting friction plays an important role when the collision velocity of dust aggregates, vcol, is not significantly larger than the threshold collision velocity for the fragmentation, vfra. Therefore, the details of particle interaction models would be crucial for investigating the collisional behavior of dust aggregates from numerical simulations.
We acknowledge that plastic deformation, melting, and fragmentation of constituent particles are not considered in this study. These effects might be important for high-speed collisions as shown in molecular dynamics simulations (e.g., Nietiadi et al. 2020, 2022). The angular velocity dependence of the strength of tangential frictions is also ignored in our simulations. Although our results revealed that vfra does not strongly depend on the strength of rolling friction alone, the collisional behavior might be affected when the strengths of all three tangential frictions increase/decrease simultaneously. Future studies on the particle interactions from laboratory experiments and molecular dynamics simulations would be essential.
Numerical computations were carried out on PC cluster at CfCA, NAOJ. H.T. and E.K. were supported by JSPS KAKENHI grant No. 18H05438. This work was supported by the Publications Committee of NAOJ.
Appendix: Total Energy Dissipation Due to Particle Interactions
Figures 6 and 7 show the total energy dissipation due to particle interactions from the start to the end of the simulations. We set and 9/12 for Figures 6 and 7, respectively. The total energy dissipation due to all particle interactions, Edis,tot, is nearly independent of ξcrit not only for but also for and 9/12.



We note that Edis,tot is smaller than the initial kinetic energy, Ntot Ekin,1. Figure 8 shows Edis,tot as a function of and vcol. Here we set ξcrit = 0.8 nm, although Edis,tot is nearly independent of ξcrit. The reason why Edis,tot is smaller than Ntot Ekin,1 is clear; fragments have kinetic energies after collisions as shown in Figure 2.

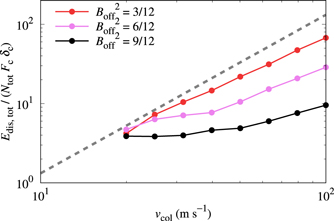
Figure 8. Dependence of Edis,tot on and vcol. Here we set ξcrit = 0.8 nm. The dashed line is the initial kinetic energy, Ntot Ekin,1, which is given by Equation (8).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download figure:
Standard image High-resolution image{kind=link}
Footnotes
- 4