
Highlights
Mechanical design methods and theoretical models of soft and hard mechanical metamaterials are reviewed based on deformation mechanisms.
Multifunctional mechanical benefits and limitations of soft and hard mechanical metamaterials are reviewed, and comprehensive performances optimization methods are categorized.
Industrial applications of soft and hard mechanical metamaterials are reviewed, perspectives and challenges are discussed.
Abstract
Auxetic mechanical metamaterials are artificially architected materials that possess negative Poisson's ratio, demonstrating transversal contracting deformation under external vertical compression loading. Their physical properties are mainly determined by spatial topological configurations. Traditionally, classical auxetic mechanical metamaterials exhibit relatively lower mechanical stiffness, compared to classic stretching dominated architectures. Nevertheless, in recent years, several novel auxetic mechanical metamaterials with high stiffness have been designed and proposed for energy absorption, load-bearing, and thermal-mechanical coupling applications. In this paper, mechanical design methods for designing auxetic structures with soft and stiff mechanical behavior are summarized and classified. For soft auxetic mechanical metamaterials, classic methods, such as using soft basic material, hierarchical design, tensile braided design, and curved ribs, are proposed. In comparison, for stiff auxetic mechanical metamaterials, design schemes, such as hard base material, hierarchical design, composite design, and adding additional load-bearing ribs, are proposed. Multi-functional applications of soft and stiff auxetic mechanical metamaterials are then reviewed. We hope this study could provide some guidelines for designing programmed auxetics with specified mechanical stiffness and deformation abilities according to demand.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 4.0 license. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
When materials or structures having negative Poisson's ratio (NPR) are compressed along the vertical direction, their dimensions along the horizontal directions decrease. Auxetic mechanical metamaterials have unique deformation characteristics, exhibiting NPR effects. In 1987, Lakes was the first to fabricate an auxetic foam, which is an auxetic material with an isotropic NPR [1]. Thereafter, researchers designed, fabricated, and investigated numerous auxetic materials and structures [2–4]. The terminology 'auxetic materials' was first used by Evans to describe the molecular network with NPR [5], and the 'auxetic' concept was widely accepted by the academic society. The elastic properties of isotropic materials can be simply described as  =
=  =
=  , where E, G, K, and ν denote the material's Young's modulus, shear modulus, bulk modulus, and Poisson's ratio, respectively. A negative value of ν can induce high shear modulus and low bulk modulus for a given Young's modulus. Owing to their auxetic deformation features, auxetic materials also exhibit high indentation resistance [6, 7], high fracture toughness [8], high impact resistance [9–11], double curvature under bending [12], and variable permeability [13]. Given their excellent mechanical properties, auxetic materials have a wide range of practical applications, including aerospace components [14], biomedical instruments and devices [15–17], electronic devices [18, 19], as well as clothes and tools for our daily life [20, 21].
, where E, G, K, and ν denote the material's Young's modulus, shear modulus, bulk modulus, and Poisson's ratio, respectively. A negative value of ν can induce high shear modulus and low bulk modulus for a given Young's modulus. Owing to their auxetic deformation features, auxetic materials also exhibit high indentation resistance [6, 7], high fracture toughness [8], high impact resistance [9–11], double curvature under bending [12], and variable permeability [13]. Given their excellent mechanical properties, auxetic materials have a wide range of practical applications, including aerospace components [14], biomedical instruments and devices [15–17], electronic devices [18, 19], as well as clothes and tools for our daily life [20, 21].
Following Lakes' work on the first artificial auxetic foam [1], numerous researchers have comprehensively investigated the fabrication and mechanical characterization of novel auxetic foams [22–30]. A large and homogeneous auxetic foam was fabricated by separating the transformation process into several stages [22]. The compression ratio along different directions, rather than the manufacturing temperature and cooling method, affected the density, stiffness, and Poisson's ratio of an open-cell auxetic foam [23]. An auxetic foam was fabricated at room temperature within a few seconds under CO2 atmosphere chamber [28]. Li and Zeng [29] provide a general principle for fabricating auxetic foams. Auxetic foams fabricated with uniform and multi-step graded compression manufacturing processes exhibited different mechanical properties [30]. Deformation mechanisms of auxetic foams are not unique and involve stretching, flexure, and hinging mechanisms [24, 25]. The nonlinear behavior of auxetic foams under stretching loading conditions are attributed to the flexure of cell walls and hinging in large deformation [26, 27], while their shear modulus is dependent on their microstructures rather than the mechanical properties of the constituent materials [27].
Two-dimensional (2D) and three-dimensional (3D) auxetic cellular materials with regular porous structures are an important part of auxetic materials [31–35]. Their mechanical properties can be designed according to demand [36], such as auxetic cellular structures with negative thermal expansion coefficient [37, 38], negative linear compressibility [39], negative stiffness [40], negative wet properties [41], extraordinary bending Poisson's effect [42], and strain rate-dependent Poisson's ratio [43]. In this paper, auxetic materials with regular structure are termed as auxetic structures. Auxetic structures and NPR effect were also found in composites [44–46], microporous polymers [47–50], ceramics [51–53], molecular auxetics [5, 54–56], and brick-mortar structures [3, 57]. The theoretical limits of Poisson's ratio of isotropic and anisotropy materials are different. Based on the mathematical theory of elasticity, the limits of Poisson's ratio are −1 ⩽ v ⩽ 0.5 for 3D isotropic solids [58]. In the case of 2D isotropic solids, the upper bound of Poisson's ratio is 1 [59]. However, Poisson's ratio for anisotropic elastic materials can be designed according to demand, without bounds along certain directions [60].
Auxetic materials are also found in nature. Poisson's ratio of pyrite crystals was proved to be −1/7 [61]. Yeganeh-Haeri et al [62] studied the auxetic behavior of α-cristobalite (SiO2). SiO2 under large axial force [63] or a temperature range of 300–1800 K [64] exhibited NPR effect. Some zeolites, such as siliceous zeolite MFI-Silicalites, also exhibited NPR effects [65, 66]. In addition, δ-Phosphorene [67], single-layer black phosphorus [68], hydrogenated borophene [69], graphene and carbon nanotubes with defects [70–72], and Mo2C nanomembranes [73] were proved to have NPR effects. Moreover, natural materials with NPR are not rare. Baughman et al [74] proved that 69% of cubic metals with face-centered cubic and body-centered cubic structures have NPR when loaded along the (110) direction. Lethbridge et al [75] investigated Poisson's ratio of 500 natural solid materials and showed that numerous metals, alloys, ionic solids, molecular solids, and many network structures have NPR effect. However, most of these solid materials showed NPR properties only along a particular spatial direction. Dagdelen et al [76] investigated Poisson's ratio of 67 000 materials and found that only SiO2 (αC), HT-AlPO4, SiO2 (α), and SiO2 (β) have average NPR. In comparison, MnV3O8, GaPO4, BVO4, FePO4, CoV3O8, FeV3O8, and SiO2 (βC) have an average Poisson's ratio close to 0 [76].
In addition to natural materials, some living biomaterials, such as cancellous bones [77], living cat skin [78], and cow teat skin [79], also have NPR effects. Gatt et al [80] discovered that tendons can also exhibit NPR effect under tension and reported that the Poisson's ratio changed when the tendons were damaged. Thus, Poisson's ratio could be an important indicator for health tendons evaluation [80]. Pagliara et al [81] observed the NPR effect in nuclei of embryonic stem cells. Consequently, the investigation of NPR in nuclei of embryonic stem cells could be an important part in recognizing life revolution.
Previous reviews of auxetic materials have focused on their structure, manufacturing process, and applications [2–4, 7, 21, 82–89]. The review of existing natural and biological auxetic materials indicates that the stiffness and deformation abilities of natural and artificially-designed auxetics can be distributed over a larger range of values. Some of these auxetic materials are soft, such as cat skin [78], while others are stiff, such as α-cristobalite (SiO2) [62]. Classical auxetic cellular structures often exhibit low modulus and strength due to their distributed porous structures [4, 90], while soft auxetic materials often exhibit low specific modulus, strength, and large elastic strain limit [19, 40]. In contrast, stiff auxetic materials often have a high specific modulus [91] and strength [92]. In this paper, the design methods for soft and stiff auxetic materials and their applications are reviewed. Soft auxetic materials can be realized with soft base material, hierarchical design, textile, and curved ribs, whereas stiff auxetic materials were realized with hard base material, hierarchical design, transfer to composite, and adding additional ribs. Systematic classification of soft and stiff auxetics according to the underlying mechanical deformation mechanisms will provide some design guidelines for the applications of auxetics in the industrial field.
2. Structures of auxetic materials
Investigating the structure of auxetic materials can provide insights into the mechanism of auxetic behavior and will be helpful in improving the properties of auxetic materials.
2.1. Re-entrant structures
The common types of auxetics include re-entrant structures, such as re-entrant hexagons, double arrowed, four-pointed star, and six-pointed star honeycombs. Evans and Alderson were among the firsts to investigate re-entrant hexagonal honeycombs [93]. Kolpakov [94] proposed an approximate calculation method for the average elastic characteristics of fine-celled framework structures similar to the re-entrant structure. Based on the 2D re-entrant structure, Robert [95] presented an isotropic 3D structure with a Poisson's ratio of −1 that consisted of rods, hinges, and springs. In general, the mechanical properties of a re-entrant hexagon honeycomb are dependent on its re-entrant angle, thickness of ribs, and length of ribs [96]. A traditional hexagonal honeycomb is a transversely isotropic material. In comparison, re-entrant hexagon honeycomb shows anisotropic behavior [96]. Poisson's ratio and stiffness are greatly affected by small changes in the effective length of structural ribs [97] or connections between inclined and horizontal ribs [98]. Lira et al [99] derived theoretical models for analyzing the shear modulus of re-entrant hexagonal honeycomb based on an energy approach. As shown in figure 1(a), the classical double-arrowed structure [33], four-point star structure [100], and six-pointed star structure [101] have one, four, and six re-entrant angles within the designed unit cell, respectively.

Figure 1. Classical 2D and 3D auxetic structures. (a) 2D re-entrant hexagonal (Reprinted from [96], Copyright (1996), with permission from Elsevier), a double-arrowed, four-pointed star (Reproduced from [100], with permission from Springer Nature), and a six-pointed star ([101, 2005], reprinted by permission of the publisher (Taylor & Francis Ltd, www.tandfonline.com.) structures ; (b) 3D re-entrant (From [1]. Reprinted with permission from AAAS) (Reprinted from [102], Copyright (2015), with permission from Elsevier), double arrowed (Reprinted from [105], Copyright (2018), with permission from Elsevier), and four-pointed star (Reproduced from [106]. CC BY 3.0) structures; (c) 2D rotating rigid squares and triangles ([65]. John Wiley & Sons. © 2000 WILEY-VCH Verlag GmbH, Weinheim, Fed. Rep. of Germany), rectangular, and different size squares (Reproduced with permission from [109]) structures; (d) 3D rotating rigid structures (Reproduced from [117], with permission from Springer Nature. Reprinted from [118], Copyright (2019), with permission from Elsevier. Reprinted from [119], Copyright (2020), with permission from Elsevier); (e) 2D chiral and anti-chiral structures (Reprinted from [127], Copyright (2010), with permission from Elsevier); and (f) 3D chiral and anti-chiral structures (Reproduced from [128]. © 2014 IOP Publishing Ltd and Deutsche Physikalische Gesellschaft. CC BY-NC-SA 3.0 [129]. John Wiley & Sons. © 2016 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim Reprinted from [130], with the permission of AIP Publishing. Reprinted with permission from [131]. Copyright (2016) American Chemical Society).
Download figure:
Standard image High-resolution imageAs shown in figure 1(b), 2D re-entrant structures can be transformed into 3D structures based on spatial translation, rotation, mirror operation, and spatial symmetrical operations. Yang et al [102] investigated a 3D re-entrant hexagon structure that may have NPR along three orthogonal directions. Schwerdtfeger et al [103] fabricated a 3D re-entrant hexagon structure that could exhibit NPR effects along two principal directions. Bückmann et al [104] fabricated a nanoscale 3D re-entrant hexagonal structure and explored new possibilities with respect to rationally designed effective materials. Similarly, 3D double-arrowed and star-shaped structures can be designed based on spatially architected 2D double-arrowed and star-shaped structures [105, 106]. There are various types of 2D and 3D re-entrant structures, and most of them exhibit anisotropic mechanical properties.
2.2. Rotating structures
Rotating rigid structures belong to an important category of auxetics, where rotating rigid squares and triangles were first proposed to explain the auxetic mechanism of the zeolites [65]. 2D rotating rigid units are shown in figure 1(c). Idealized rotating rigid squares and triangles are isotropic with Poisson's ratio −1 [107], while resultant Young's modulus depends on the stiffness constant of their hinging. Their shear modulus improved remarkably due to NPR effects [107]. Rotating rigid rectangles [108] and rotating heterogeneous squares and rectangles [109] were proposed based on rotating rigid squares and triangles. In ideal rotating rigid unit models, the nodal connection between rigid units should be perfectly hinged [110]. However, it is difficult to realize the practical fabrication of rotational rigid structures with perfect hinges. Considering this, Grima et al [111] proposed rotating semi-rigid units to describe the auxetic behavior of zeolites and predicted their Young's modulus and Poisson's ratio. Rotating semi-rigid units were also used to describe the auxetic behavior of auxetic foam [112]. Spatially periodical oriented cuts and randomly orientated cuts were used to fabricate rotating structures practically [113–116].
Based on 2D auxetics with rotational rigid structural components, 3D rotating rigid unit cells are shown in figure 1(d). For example, tetrahedral framework structures can be assumed as 3D rotating rigid structures to better understand the auxetic deformation behavior of α-cristobalite [117]. Inspired by rotating squares and triangles, two 3D auxetic structures were fabricated based on wire-woven metals [118]. The rotating rigid squares exhibit remarkable potential for designing novel 3D auxetic cellular materials with lightweight properties and high stiffness [119].
2.3. Chiral structures
Chiral structures are a special category of auxetic structures that integrate nodal rigid body rotation and rib bending or twisting deformation features. 2D chiral and anti-chiral structures are shown in figure 1(e). In the chiral structure, the nodal rigid body rotation components at the two ends of the ribs are situated on opposite sides of the same rib. In the case of anti-chiral structure, the nodal rigid body rotation components at the two ends of the ribs are situated on the same sides of the rib. The Poisson's ratio of the hexachiral structure was proved to be −1 due to the geometrical rotational symmetrical properties [120]. Spadoni and Ruzzene [121] employed a micropolar-continuum model to analyze the in-plane elastic behavior of the hexachiral honeycomb and obtained an isotropic Poisson's ratio of −1 when the circular node of the hexachiral structure is stiff. They also reported that an ideal hexachiral structure could generate an infinite shear modulus [121]. Considering the deformation coupling between rotation and bulk deformation, Liu et al [122] introduced a single material parameter related to chirality in micro-polar continuum theory to analyze the global auxetic expansion and local rotation coupling effects. Alderson et al [123] investigated hexachiral, tetrachiral, anti-tetrachiral, trichiral, and anti-trichiral honeycombs using experimental and numerical methods and showed that hexachiral and tetrachiral structures can generate NPR value of −1. In their study, anti-trichiral honeycomb with a short ligament showed NPR, whereas trichiral honeycomb showed a positive Poisson's ratio [123]. Anisotropy ratio and elastic constants of anti-tetrachiral honeycomb can be programmed and achieved through changing lattice structural geometrical parameters [124, 125]. Researchers also investigated the out-of-plane bending and shear mechanical properties of chiral honeycombs [126, 127].
Based on several typical 2D chiral and anti-chiral topological configurations, 3D chiral and anti-chiral structures are shown in figure 1(f). Bückmann et al [128] designed and fabricated 3D auxetic material to generate the ultimate Poisson's ratio of −1. Numerical analysis and experimental results showed that the 3D anti-tetrachiral structure can generate the NPR effect and anisotropic behavior [129]. In addition, 3D anti-chiral auxetic metamaterials could have tunable Poisson's ratio from −0.45 to 0.35 and phononic bandgap by changing its unit cell parameters [130]. 2D and 3D auxetic materials with isotropic negative thermal expansion properties can be realized through a chiral deformation mechanism based on the strain mismatch within the interface of the bimaterial cantilever [131].
2.4. Some other structures
In addition to typical re-entrant, rotating units, and chiral structures, more novel auxetic structures have been proposed by researchers for achieving NPR effects based on novel deformation mechanisms. Similar to the re-entrant auxetic structure, an auxetic structure with missing ribs was proposed to describe the mechanical behavior of auxetic foam [133, 134]. Lim et al [135] introduced the missing rib deformation mechanism into traditional hexagonal honeycomb structures and predicted the auxetic behavior of carbon nanotubes with local defects. Some studies proposed a nodule-fibril structure for modeling the auxetic behavior of auxetic microporous polymers [5, 47, 49], and the nodule-fibril model could predict the strain-dependent Young's modulus and Poisson's ratio of microporous polymers [49, 136]. Moreover, Gaspar et al [136] proposed a 3D nodule-fibril structure model to better understand the out-of-plane behavior of auxetic microporous polymers, and the corresponding theoretical model results agree with experimental results better than that of the traditional 2D nodule-fibril structure. Besides, novel rationally designed 2D and 3D auxetic radially-foldable structures can generate a NPR of −1 [137, 138]. Theoretical analysis showed that hexagonal and triangular radially-foldable structures are isotropic, while the square structure exhibits cubic anisotropic deformation features [138]. Cabras and Brun [139] analyzed the anisotropic elastic constant of 2D and 3D radially-foldable structures and proposed methods to realize their isotropic properties. A study showed that auxetic behavior can be realized in hollow sphere structures using the interaction between thin-wall hollow spheres through spatial assembly [140]. It should be noted that not all auxetic materials show NPR effects at the beginning of deformation. Buckling deformation-guided structures and helical auxetic yarn structures are two typical auxetic structures for realizing NPR at large strains. Buckling auxetic structure can generate NPR after buckling [141, 142], while helical auxetic composite yarn structure was realized based on a thick soft elastomeric straight core and thin stiff entangled spiraling fibers. Such composite structure becomes auxetic when the thin stiffer wrap becomes the core fiber, and the thick soft fiber becomes the helical fiber [143, 144].
Due to space limitations, all the auxetic structures could not be shown here. Nevertheless, more details on auxetic structures are provided in previous reviews [2, 4, 59, 82, 145–148].
3. Soft auxetic mechanical metamaterials with low stiffness and large deformation abilities
Natural and artificially designed soft materials are typically featured with low modulus and large elastic deformation characteristics. Poisson's ratio of materials and structures can be generally expressed as:

where  denotes strain along the loading direction, and
denotes strain along the loading direction, and  denotes strain perpendicular to the loading direction [59].
denotes strain perpendicular to the loading direction [59].  and
and  denote strains at small strains for linear elastic materials and strains at large strains for nonlinearly elastic materials. Strains
denote strains at small strains for linear elastic materials and strains at large strains for nonlinearly elastic materials. Strains  and
and  are often obtained by unit cells with periodic boundary conditions or selected several arrays of unit cells within the central region of the sample. Center unit cell of buckling guided auxetic mechanical metamaterials is shown in figure 2(a). Four marked points A, B, C, and D are used to calculate the effective Poisson's ratio. Before compression, the length along the
are often obtained by unit cells with periodic boundary conditions or selected several arrays of unit cells within the central region of the sample. Center unit cell of buckling guided auxetic mechanical metamaterials is shown in figure 2(a). Four marked points A, B, C, and D are used to calculate the effective Poisson's ratio. Before compression, the length along the  and
and  directions are
directions are  and
and  , respectively. After deformation, the displacement of the four points along the
, respectively. After deformation, the displacement of the four points along the  direction is
direction is  ,
,  ,
,  , and
, and  , while the corresponding displacement of the four points along the
, while the corresponding displacement of the four points along the  direction is
direction is  ,
,  ,
,  , and
, and  , respectively. Therefore, the strains along the
, respectively. Therefore, the strains along the  and
and  directions are
directions are


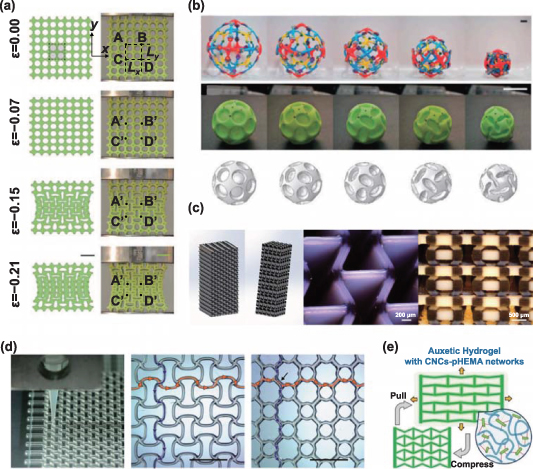
Figure 2. Soft auxetic mechanical metamaterials built with soft constituent materials: (a) buckling-induced auxetic materials made from silicone rubber (Reproduced from [154] with permission from the Royal Society of Chemistry), (b) auxetic spherical shells (Reproduced from [158]. CC BY 4.0), (c) dual-material re-entrant auxetic materials (Reprinted from [160], Copyright (2015), with permission from Elsevier), (d) PDMS-based architectures using direct ink writing ([162]. John Wiley & Sons. © 2015 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim), and (e) hydrogels for 3D printing of auxetic structures. [163] John Wiley & Sons. © 2022 Wiley-VCH GmbH.
Download figure:
Standard image High-resolution imageTherefore, the Poisson's ratio  of soft auxetic mechanical metamaterials within nonlinear elasticity during the loading process is
of soft auxetic mechanical metamaterials within nonlinear elasticity during the loading process is  .
.
In the following, soft auxetic mechanical metamaterials are classified into four main categories: soft constituent material, hierarchical design, textile auxetic materials, and curved ribs.
3.1. Soft auxetic mechanical metamaterials constructed with larger deformation constituent materials
Typical constituent soft materials, such as rubber, silicone rubber, and polydimethylsiloxane (PDMS), are used to fabricate auxetic mechanical metamaterials. Compared to other auxetic mechanical metamaterials that exhibit a NPR at the initial elastic deformation stage, buckling-induced auxetic structures can only generate NPR effects after certain compressed strain limits [149]. Therefore, buckling-guided auxetic mechanical metamaterials have been often fabricated with soft constituent materials [149, 150]. As shown in figure 2(a), arrays of circular holes are periodically distributed for triggering buckling deformation after a certain compression strain level (see  ). When the structure is compressed before buckling (see
). When the structure is compressed before buckling (see  ), periodically distributed circular voids change to periodically distributed elliptical voids. However, after buckling, the elliptical voids arranged in one direction suddenly switch into elliptical voids arranged in a mutually orthogonal configuration (see
), periodically distributed circular voids change to periodically distributed elliptical voids. However, after buckling, the elliptical voids arranged in one direction suddenly switch into elliptical voids arranged in a mutually orthogonal configuration (see  ). The underlying mechanism of the pattern transformations in buckling-induced structures is the buckling of thin ligaments between voids and the corresponding folding mechanisms [151, 152].
). The underlying mechanism of the pattern transformations in buckling-induced structures is the buckling of thin ligaments between voids and the corresponding folding mechanisms [151, 152].
Nonlinear structure buckling can trigger auxetic deformation behavior when rubber is used as the basic material, while no auxetic deformation behavior is observed when brass is used as the basic material [153]. Buckling-induced structures built with soft materials can easily generate auxetic properties. Four types of 2D buckling-guided auxetic mechanical metamaterials were designed and fabricated using silicone rubber based on the square, triangular, tri-hexagonal, and rhombic tri-hexagonal geometrical configurations (see figure 2(a)) [154]. These materials possess reversible, repeatable, and scale-independent switches between compact periodic and expanded configurations reversibly under compression [154]. Multi-phase materials (including stiff inclusions, soft matrix, and void) were used in the fabrication of buckling-induced multi-phase auxetics with soft behavior [155]. The corresponding auxetic deformation behavior of multi-phase auxetics depended on the spatial distribution positions of its three constituent phases, while the bandgap frequency ranges of elastic waves can be controlled and regulated at different deformation stages [155]. Li and Rudykh [156] showed that the extreme values of NPR, onset of instabilities, and the corresponding switches to extremely soft behavior of multiphase auxetics can be controlled by the inclusion arrangements and volume fractions. Tunable bandgaps and post-buckling deformation can also be designed by introducing stiff inclusions into multiphase auxetics [157]. Moreover, the post-buckling deformation of multiphase auxetics could be more robust as its post-buckling deformation sensitivity to the initial geometrical imperfections was significantly reduced [157]. The buckling-induced structures can be transformed into 3D structures by introducing out-of-plane deformation characteristics. Buckling deformation-guided auxetic structures design of sphere balls can be realized through buckling and hole shape transformation mechanisms (see figure 2(b)) [158]. Babaee et al [141] proposed and fabricated a class of 3D Bucklicrystal lattice structures using silicone-based rubber, and these lattice structures exhibited NPR at large compression strain up to −0.3 [141]. Yuan et al [159] fabricated similar 3D soft auxetic lattice structures with the help of selective laser sintering [159].
Soft auxetic mechanical metamaterials consisting of soft constituent materials are not limited to buckling deformation-guided auxetic structures. Dual-phase materials, elastic joints, and stiff ribs are also used to fabricate re-entrant auxetic composite structures (see figure 2(c)) [160]. The application of elastic joints allows stable auxetic behavior at large compression strains up to −0.25 [160]. Wu et al [161] fabricated silicone rubber-based pre-twist kagome lattices to avoid instability and obtain a smooth homogenous structural phase transformation. Stress–strain behavior and NPRs of these soft mechanical metamaterials can be controlled with pre-twisting angles [161]. Lattice auxetic structures built with poly (dimethylsiloxane) were designed to generate constant auxetic behavior over large strains of up to 0.2 (see figure 2(d)) [162], where, the constant Poisson's ratio can be manipulated within the range of −0.8 and 0.8 [162]. 3D printing is a useful strategy to fabricate complex auxetic materials. However, there are limited soft base materials for 3D printing. Methacrylate cellulose nanocrystals were used as a macro-cross-linking agent in poly (2-hydroxyethyl methacrylate) hydrogels for 3D printing of auxetic structures in order to create auxetic structures with large stretchability and enhanced toughness (see figure 2(e)) [163].
3.2. Soft auxetic materials with hierarchical structural design
Hierarchical design can provide physical properties in structural materials that are tailored for specific applications [164]. Rotating structures, especially rotating rigid squares, were comprehensively used in the hierarchical design of auxetic materials for generating soft large deformation features [165–167]. Based on rotating squares, Dudek et al [165] proposed hierarchical auxetic materials with programmed mechanical properties through hinge rotation resistance manipulation, which can realize the robust tunability and versatility of the proposed materials. The hierarchical design of rotating squares could also bring auxetic materials with stable structural reconfiguration and tunable phononic bandgaps [167]. Tang and Yin [168] proposed hierarchical kirigami-based auxetic materials to generate large compressibility and stretchability. Their results showed that porous square cut-based PDMS materials at the 2nd level exhibited auxetic behavior at large compression strain up to 0.5 (see figure 3(a)), while porous rectangle cut-based hierarchical PDMS material at the 2nd level could generate auxetic behavior at large stretching strain up to 1.2 [168].
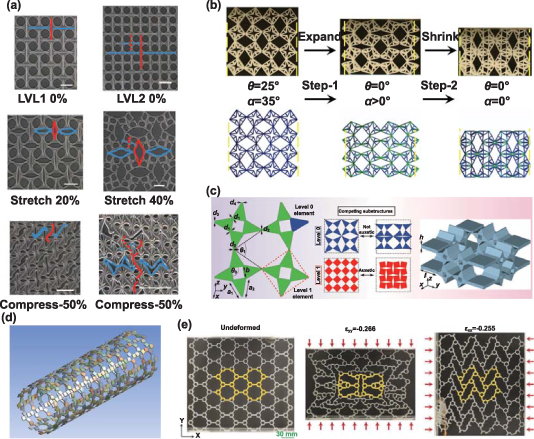
Figure 3. Soft auxetic materials constructed through a hierarchical design strategy: (a) hierarchical kirigami-based auxetic materials (Reprinted from [168], Copyright (2017), with permission from Elsevier), (b) hierarchical metamaterials with structural reconfigurability (Reprinted from [169], Copyright (2021), with permission from Elsevier), (c) hierarchical auxetic metamaterials with final shape controllability ([172]. John Wiley & Sons. © 2022 The Authors. Advanced Materials published by Wiley-VCH GmbH), (d) hierarchical auxetic stent (Reproduced from [173], with permission from Springer Nature), and (e) hierarchical hexagon structure (Reproduced from [175], with permission from Springer Nature).
Download figure:
Standard image High-resolution imageLi et al [169] proposed hierarchical metamaterials with multi-step pathways and shape reconfigurability using the synergistic deformation features of rotating squares and star-shaped structural components (see figure 3(b)). By changing the rotating angle and re-entrant angle, the stress–strain curves of the hierarchical structure can be designed to generate one, two, or even three steps according to demand [169]. The structural shape during the deformation process is related to the given stain ranges on the stress–strain curves, i.e., sudden change in the stress–strain curve corresponding to structural reconfiguration at different steps. This hierarchical metamaterial can possess NPR and large soft deformation behavior as well. In contrast to the multi-step pathways, some hierarchical auxetic metamaterials can be designed to generate synchronized deformation [170, 171]. Seifi et al [170] proposed 2D and 3D hierarchical structures with uniform and easily-controllable deformations using rotate-and-mirror operation, and the synchronized deformation was controlled by the synchronized motion of rotating units comprising the hierarchical structure.
Dudek et al [172] proposed and fabricated 2D and 3D hierarchical auxetic metamaterials with highly unusual auxetic behavior based on the cooperative deformation of constituent sub-structures (see figure 3(c)). Their experimental results showed that the auxetic behavior of the designed structure depends on the geometric parameters, and the final shape of the deformed structures was controllable [172]. Gatt et al [173] designed a class of hierarchical auxetic materials based on architected rotating squares for stent application, as shown in figure 3(d). Such novel stents based on hierarchical auxetic materials could reduce inflammation due to reduced actual surface area. Hierarchical auxetic structures were also used to create a heterogeneous surface. Auxetic materials with triggered 3D deformation patterns and programmable stress–strain response can be obtained using the hierarchical design of rotating squares as well as their thickness, and the heterogeneous surface can be realized by combining multiple hierarchical patterns [174]. The hierarchical design could generate auxetic behavior for the sub-structure with a positive Poisson's ratio. As shown in figure 3(e), auxetic behavior was observed during the compression process of the hierarchical hexagonal structure [175]. This structure can also be classified as buckling-induced auxetic structure as their auxetic behavior was induced by instabilities (i.e., buckling) and was observed over a wide strain range [175].
As shown in figure 3, most of the hierarchical auxetic structures with soft behavior were built based on rotating unit cells, and their structures at different structural levels were connected by a single point. Hierarchical design decreases the resistance of deformation as the rotation/deformation arms were much larger than their connections. Moreover, structures at different levels can bear certain deformation. The maximum deformation could be a sum of the deformations at every level, resulting in larger deformations of the hierarchical structures. Furthermore, hierarchical auxetic structures can show auxetic behavior at large strains as the structures at every level can be built by auxetic structures.
3.3. Soft textile auxetic materials
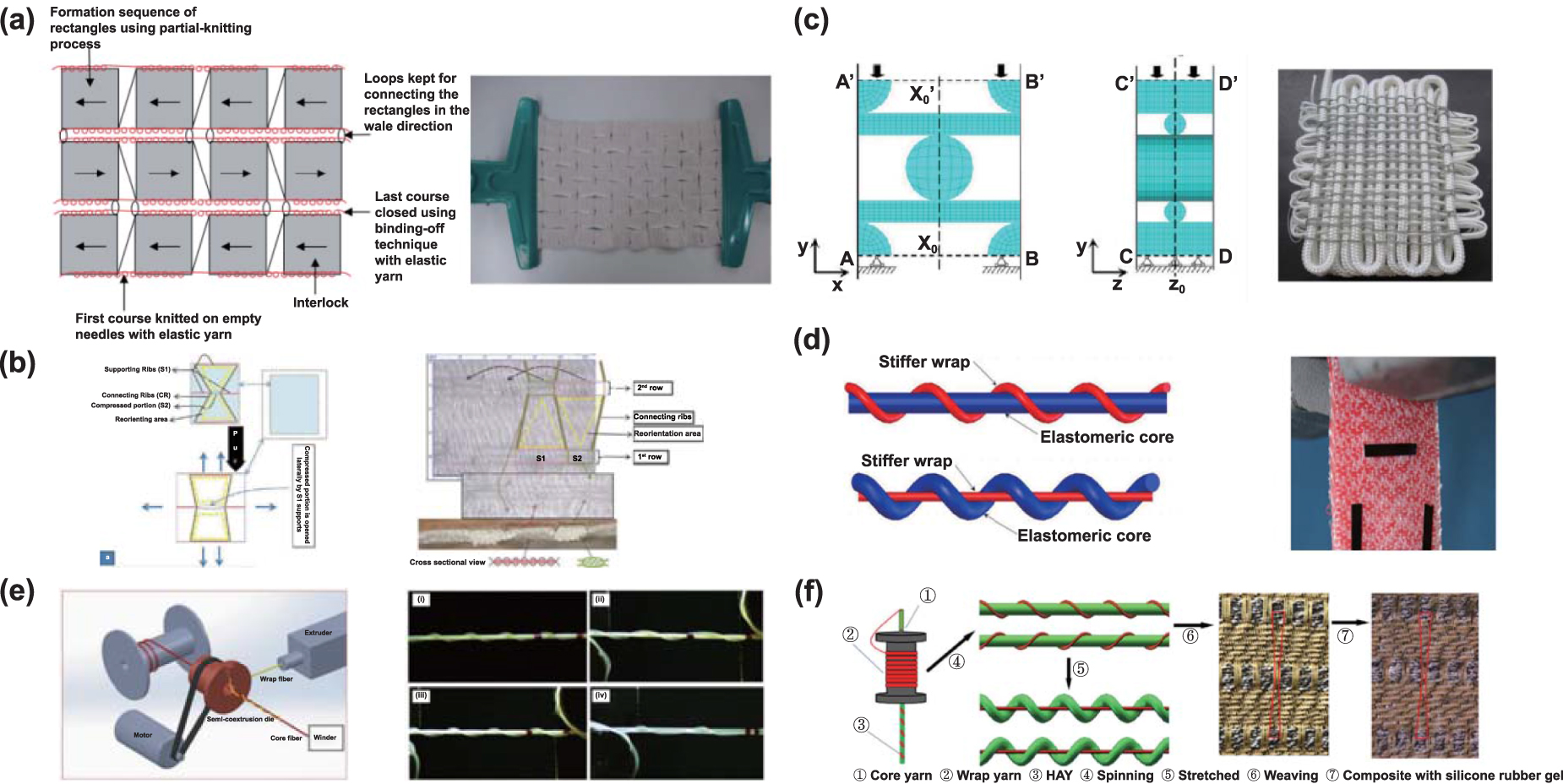
Auxetic fabrics can be fabricated using knitting technology involving conventional yarns. As shown in figure 4(a),2D auxetic fabrics made from conventional yarns were fabricated using flat knitting technology [176]. Three kinds of structures, i.e., re-entrant hexagonal, rotating rectangle, and foldable structures, were successfully fabricated in reference [176]. As shown in figure 4(b), 2D woven auxetic fabrics fabricated by Ali et al [177] possess low modulus and superior mechanical properties, including high tensile strength, high tear strength, high bursting strength, and high cut resistance. These 2D woven auxetic fabrics can be used as wearable protection. As shown in figure 4(c), Ge et al [178] proposed a 3D auxetic textile structure whose behavior depends on the structural parameters and properties of yarns. In addition, a numerical method was developed to reveal the deformation mechanism of 3D auxetic textile structure [179].
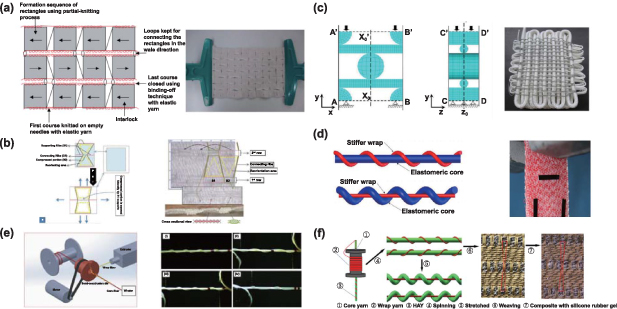
Figure 4. Soft auxetic materials built by textile and brand composites: 2D auxetic fabrics fabricated using (a) flat knitting (Reproduced with permission from [176]) and (b) woven (Reproduced with permission from [177]) technique, (c) 3D auxetic textile structure (Reproduced from [178]. © IOP Publishing Ltd. All rights reserved), (d) auxetic double-helix yarn (Reproduced with permission from [143]), (e) helical auxetic yarns manufactured using semi-coextrusion process (Reproduced from [185]. CC BY 4.0.), and (f) yarn fabric–based multi-scale auxetic composites Reprinted from [190], Copyright (2020), with permission from Elsevier.
Download figure:
Standard image High-resolution imageA helical auxetic yarn is a special type of textile auxetic material that consists of a stiffer wrap and an elastomeric core, as shown in figure 4(d) [143]. The position of the stiffer wrap and elastomeric core swap when the yarn is stretched, thus inducing NPR effects. Miller et al [143] fabricated composite structures of helical auxetic yarn that exhibited low modulus and auxetic behavior. In their study, the modulus and Poisson's ratio of the composite are 5.8 MPa and −0.1, respectively, and its stretching strain was 0.35. Meanwhile, the modulus and Poisson's ratio of helical auxetic yarn depend on the starting wrap angle [180], core/wrap diameter ratio [181], and the tensile modulus ratio of wrap and core [182]. McAfee and Faisal showed that a critical starting wrap angle can lead to maximum auxetic behavior [181]. In their study, the maximum NPR is −12.04, and the corresponding critical angle is 7°. Large auxetic behavior could be obtained when the tensile modulus of the wrapped fiber is high and the tensile modulus of the core fiber is low. The tensile modulus ratio of the wrap and core should be larger than 20 in order to obtain auxetic behavior [182]. The maximum Poisson's ratio of helical auxetic yarn can also be predicted using an artificial neural network and semi-empirical model [183].
Investigations were also performed to improve the fabrication techniques of helical auxetic yarn. Slippage of the wrap could reduce the auxetic behavior of the helical auxetic yarn. To avoid wrap slippage, a helical auxetic yarn was transformed into a composite yarn by adding soft coatings onto the surfaces of fibers [184]. In addition, Zhang et al [185] proposed a semi-coextrusion process to fabricate large-scale and cost-effective auxetic yarns for practical industrial applications.
In recent years, new types of auxetic yarns have been proposed based on helical auxetic yarn. Razbin et al [186] proposed a double-core helical yarn with auxetic behavior (see figure 4(e)) and also proposed a modified theoretical model to predict the maximum NPR of the yarn by considering the nonlinear behavior of Poisson's ratio of the fiber core components. Ge et al [187] proposed a novel plied yarn structure formed with two soft yarns and two stiff yarns for achieving auxetic behavior under axial tension. Jiang and Hu [188] proposed and fabricated a tubular auxetic braided structure with 16 yarns using a standard braiding technique to overcome the yarn slippage problem.
Highly stretchable auxetic fabrics have also been proposed and fabricated by researchers using helical auxetic yarn [189, 190]. Woven fabrics formed with helical auxetic yarns showed self-folding and self-curling behavior in the natural state [189]. When stretched, this woven fabric showed the maximum Poisson's ratio value of −0.3 at a strain value of 200%. Chen et al [190] fabricated a multi-scale auxetic fabric by constructing a re-entrant structure with a helical auxetic yarn; this fabric exhibited high stretchability, stability, and soft behavior (see figure 4(f)). They used this fabric to fabricate an auxetic composite and showed that the tensile strain of auxetic fabric and auxetic composite could be over 108% and 82%, respectively [190].
3.4. Soft auxetic materials consisting of curved ribs
Curved structures possess softer behavior than those built with straight lines. Curved microstructures have been successfully used by researchers to design stretchable and flexible electronics [191]. Soft auxetic mechanical metamaterials with curved ribs were also designed and fabricated.
Structural materials with low-modulus, large elastic strains, and nonlinear stress–strain behavior were obtained by introducing horseshoe-curved structures into the conventional triangle, hexagon, and kagome lattices (see figure 5(a)) [192]. The mechanical responses of these structural materials can be tailored to match the nonlinear mechanical performances of real skins, which can be used for tissue engineering and soft biomedical devices [192]. Ma et al [193] developed a theoretical model of horseshoe structure to predict their nonlinear J-shaped stress–strain response as well as Poisson's ratio. The hierarchical design of horseshoe structure is beneficial for generating lower Young's modulus and higher stretchability [192, 194]. Another curved microstructure similar to the horseshoe structure was used in the hexagonal honeycomb structure, including re-entrant hexagonal honeycomb and regular hexagonal honeycomb, to obtain a honeycomb lattice with reconfigurable shape, high stretchability, and tunable Poisson's ratio [195]. The targeted deformed shape can be realized by controlling geometrical parameters and ambient temperature [195].
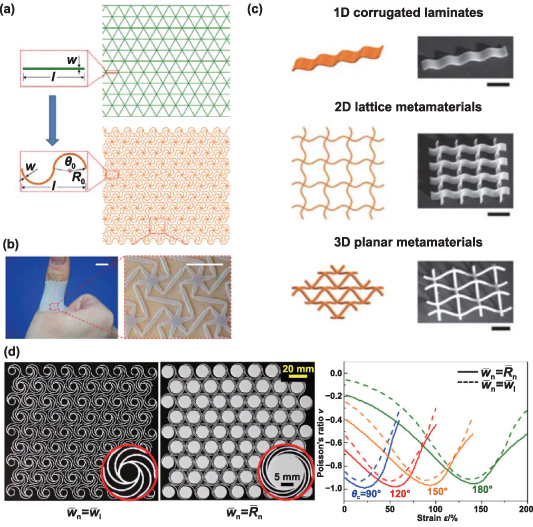
Figure 5. Soft auxetic materials consisting of curved ribs: triangle lattice with (a) horseshoe (Reprinted from [193], Copyright (2016), with permission from Elsevier) and (b) zigzag (Reproduced from [196] with permission from the Royal Society of Chemistry) microstructure; (c) 2D and 3D lattice structures with sinusoidal microstructure (Reproduced from [198], with permission from Springer Nature); and (d) chiral structure with curved cells Reprinted from [199], Copyright (2021), with permission from Elsevier.
Download figure:
Standard image High-resolution imageAs shown in figure 5(b), zigzag microstructures are introduced in a triangular lattice for designing soft materials with isotropic Poisson's ratio within the range of −1 to 1 [196], and the strain range of the structure material can be controlled from 0% to ∼90% [196]. Replacing the straight ribs in a square lattice with sinusoidally shaped ones can also lead to structural materials with auxetic behavior and soft performance [197]. Experimental and numerical investigations have showed that the Poisson's ratio of this material can be changed from −0.7 to 0.5, and the ultimate tensile strain can go up to 0.5 [197]. Li et al [198] used sinusoidally shaped microstructure for designing 2D and 3D lattice structures with soft behavior and NPR effects (see figure 5(c)). Compared to the classical 2D honeycomb, the sinusoidally shaped microstructure could generate out-plane deformation under external loading, and 2D honeycomb was transformed into 3D meta-structures. Liu et al [199] designed chiral soft auxetic mechanical metamaterials with tunable mechanical responses and high ultimate strain limit (see figure 5(d)). The ultimate stain, nonlinear stress–strain curves, and ultimate strength of chiral structures, can be precisely manipulated with several key geometric parameters [199].
Soft auxetic mechanical metamaterials consisting of curved ribs often exhibit nonlinear mechanical properties and usually generate J-shaped stress–strain curves under tensile loading conditions [193]. Such a design scheme can provide a general strategy for designing mechanical metamaterials with the perspective of nonlinear mechanical response, especially for biomedical applications.
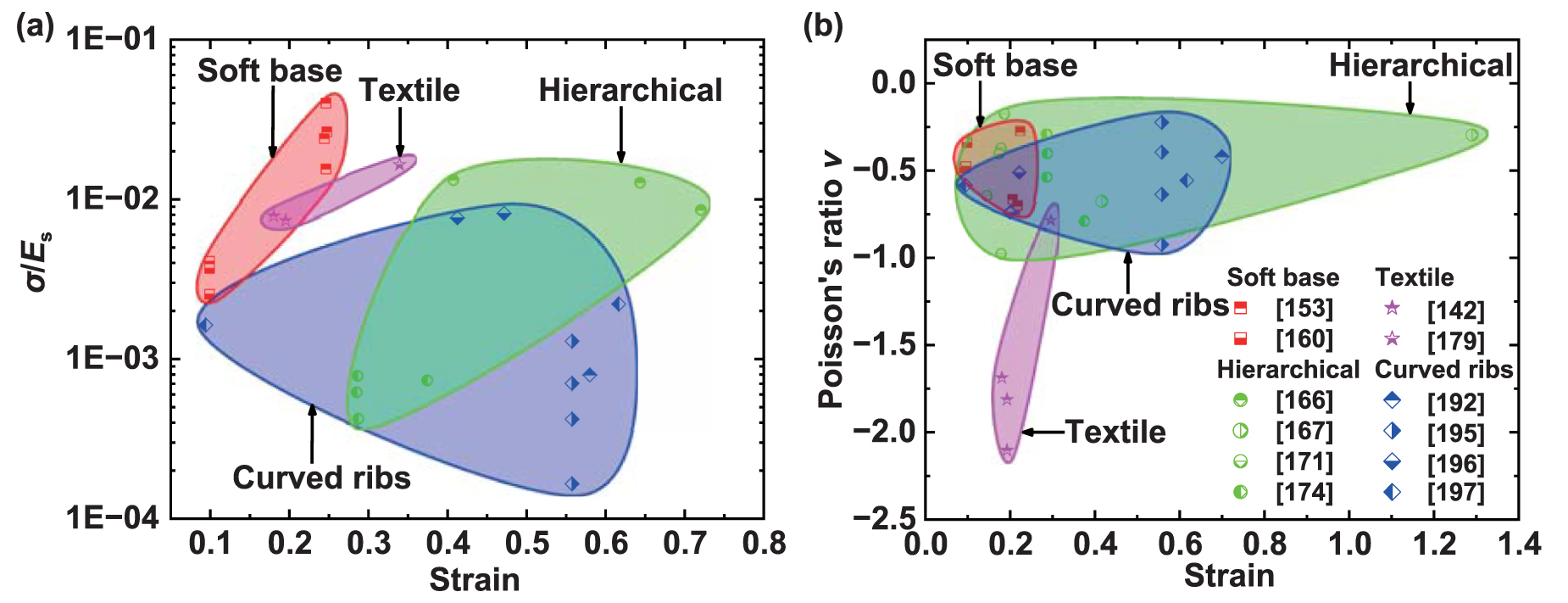
Figure 6 shows a comparison of normalized stress and Poisson's ratio versus strain of soft auxetic materials built with soft constituent material, textile, hierarchical design, and curved ribs. As shown in figure 6(a), the effective stress  of auxetic materials was normalized by the Young's modulus
of auxetic materials was normalized by the Young's modulus  of the constituent materials. Materials with low normalized stress at large strains exhibit improved soft behavior. Generally, auxetic mechanical metamaterials designed with curved ribs [193, 196–198] and hierarchical [167, 168, 172, 175] structures exhibit low stress and a larger range of strains. These materials also exhibit auxetic behavior at large strains. As shown in figure 6(a), the normalized stress
of the constituent materials. Materials with low normalized stress at large strains exhibit improved soft behavior. Generally, auxetic mechanical metamaterials designed with curved ribs [193, 196–198] and hierarchical [167, 168, 172, 175] structures exhibit low stress and a larger range of strains. These materials also exhibit auxetic behavior at large strains. As shown in figure 6(a), the normalized stress  of auxetic mechanical metamaterials with curved ribs is smaller than 2 × 10−4 when the ultimate strain is approximately 0.56. The hierarchical auxetic structure given in [168] can generate auxetic deformation, and the ultimate strain is larger than 1.3 (see figure 6(b)).
of auxetic mechanical metamaterials with curved ribs is smaller than 2 × 10−4 when the ultimate strain is approximately 0.56. The hierarchical auxetic structure given in [168] can generate auxetic deformation, and the ultimate strain is larger than 1.3 (see figure 6(b)).
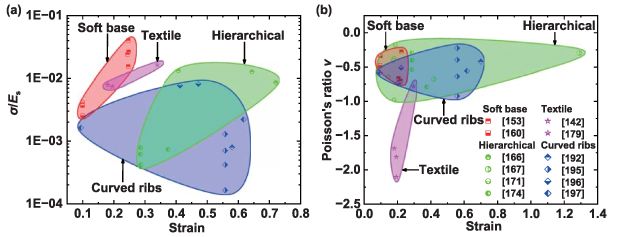
Figure 6. Comparison of mechanical properties of soft auxetic materials built with different methods: (a) normalized stress; and (b) Poisson's ratio.
Download figure:
Standard image High-resolution imageThe design methods for soft auxetic mechanical metamaterials are not limited to the above-mentioned methods. For instance, topological optimization is an effective method to design auxetic mechanical metamaterials with expected mechanical properties [200]. Zhang et al [201] carried out topology optimization of chiral auxetic metamaterials based on bi-material structural schemes and modulated the final stiffness and NPR based on the volume fractions of each constituent material phase. Andreassen et al [202] developed auxetic mechanical metamaterials with low bulk modulus (0.2% of its constituent material's bulk modulus) and Poisson's ratio of −0.5 using the topology optimization method. Multi-objective topological optimization method was successfully used to design 2D auxetic materials based on a compliant mechanism [203], and this method can be extended to design auxetic mechanical metamaterials with large deformation, nonlinear elasticity, or elastoplasticity deformation abilities [203].
4. Stiff auxetic materials
Auxetic mechanical metamaterials with high stiffness and high strength are classified into the following four categories: hard constituent materials, hierarchical structural design, composite structures, and adding additional load-bearing ribs.
4.1. Stiff auxetic materials composed of hard constituent materials
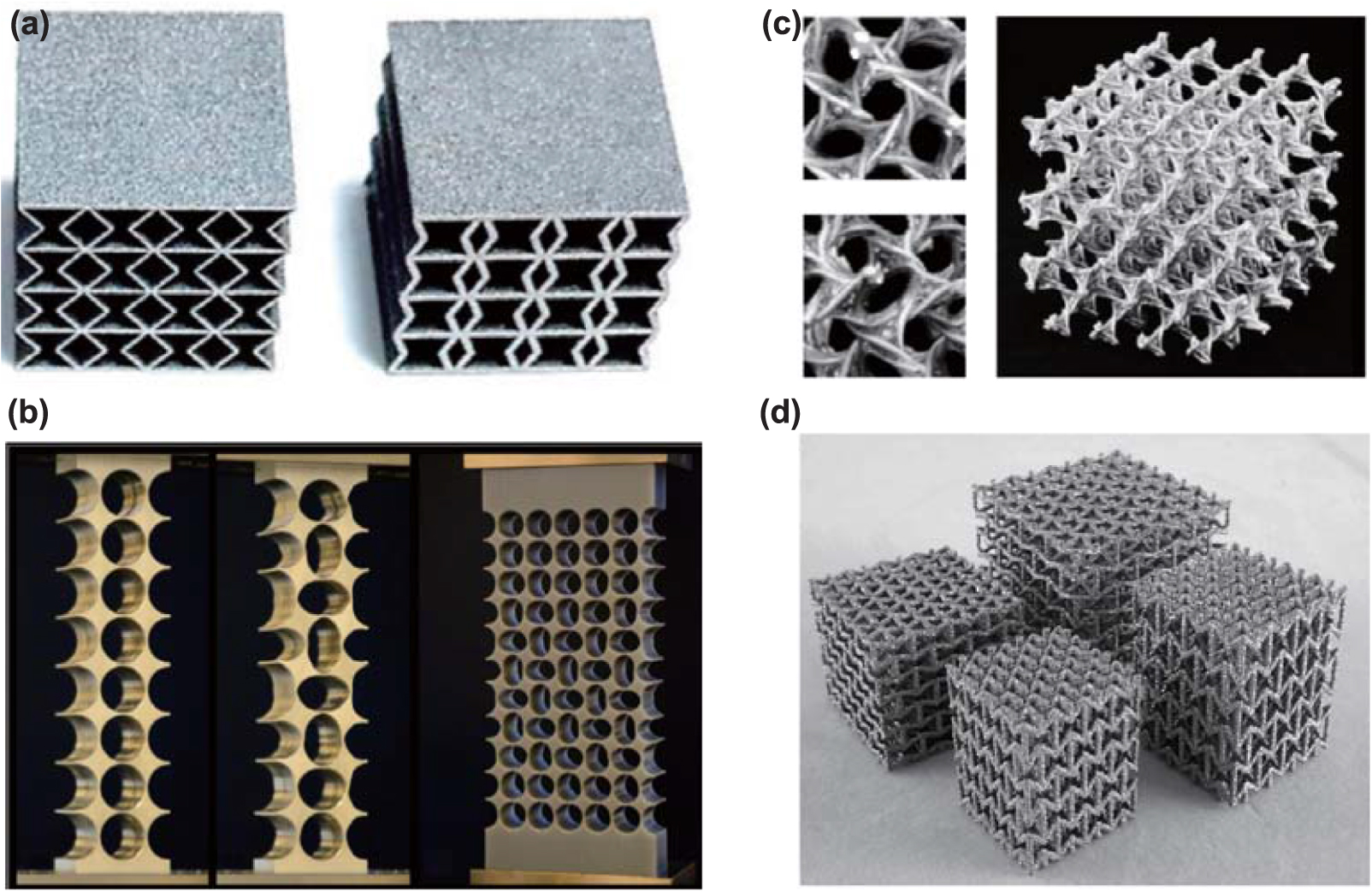
Block hard materials, such as metals, show stiff behavior due to their intrinsic property. Auxetic mechanical metamaterials constructed with hard constituent materials produce higher stiffness and strength than the same structures built with soft constituent materials. Al-based 3D auxetic lattices were fabricated with 3D printing and investment casting hybrid manufacturing [204]. The relative density and Poisson's ratio of Al-based auxetic structures were in the range of 0.13–0.37 and −0.58 to −1.55, respectively [204]. The corresponding Young's modulus was in the range of 34 MPa–337 MPa [204]. Experimental results showed that Poisson's ratio of thin- and thick-walled auxetic structures made through 3D printing with AlSi10Mg constituent materials ranged from −0.108 to −0.257 (see figure 7(a)) [205]. The corresponding Young's modulus of these structural materials can be designed up to 2 GPa [205]. As shown in figure 7(b), mechanical metamaterials with buckling deformation components were fabricated using metal and plastic sheets [206], indicating that buckling deformation can generate the NPR effect [206]. Two metal-based 3D auxetic materials were fabricated using wire-woven technique through mimicking the deformation mechanisms of rotating rigid unit cells (see figure 7(c)) [118]. The metal-based 3D auxetic materials made of spring steel wires were prepared with heat-treatment technique during brazing, which can generate an ultimate strength up to 44 MPa [118].
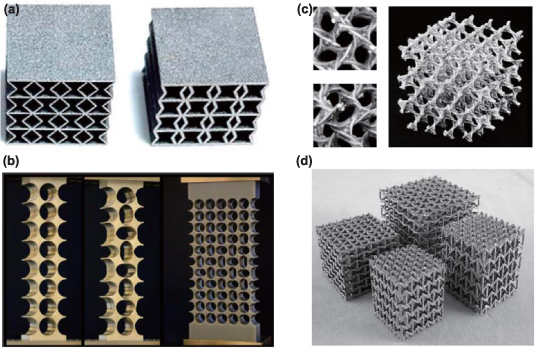
Figure 7. Stiff auxetic materials constructed with hard constituent materials and robust structural schemes: (a) AlSi10Mg-based auxetic structure (Reprinted from [205], Copyright (2020), with permission from Elsevier), (b) metal-based buckling-induced (Reprinted from [206], Copyright (2020), with permission from Elsevier), (c) wire-woven (Reprinted from [118], Copyright (2019), with permission from Elsevier) structure, and (d) Ti-6Al-4V 3D re-entrant structure Reprinted from [208], Copyright (2012), with permission from Elsevier.
Download figure:
Standard image High-resolution imageSchwerdtfeger et al [207] designed a 3D re-entrant cellular structure with NPRs along two directions, while positive Poisson's ratio along the other direction. They used a selective electron beam melting technique with a base material of Ti-6Al-4V to fabricate the 3D re-entrant cellular structure, and its NPR effect ranged from −0.2 to −0.4 [207]. Topological optimization with additive manufacturing technique restraints was developed for designing 3D auxetic cellular structures with desirable mechanical properties [103], Poisson's ratio and Young's modulus of the designed structure were −0.588 and 1.51 GPa, respectively. The corresponding Poisson's ratio and Young's modulus of the as-fabricated auxetic mechanical metamaterials were −0.58 ± 0.04 and 1.34 ± 0.03 GPa, respectively [103]. Similarly, Yang et al [208] used Ti-6Al-4V materials to fabricate 3D re-entrant materials with NPR along three principal directions (see figure 7(d)). When the relative density was about 0.31, the resultant Young's modulus and strength of the as-fabricated auxetic mechanical metamaterials were 5 GPa and 76 MPa, respectively [208]. Besides lightweight alloy constituent materials, Wang et al used assembly method to fabricate carbon fiber-reinforced polymer 3D auxetic mechanical metamaterials with double-arrowed structural configuration [105]. They showed that their composite 3D double-arrowed structure possesses higher specific stiffness than that of the metal structure [105].
4.2. Stiff auxetic materials with hierarchical design
The hierarchical design of auxetic structures can generate soft mechanical behavior, but it can also lead to stiff auxetic mechanical metamaterials. Generally, re-entrant unit cells were used for the hierarchical design of stiff auxetic mechanical metamaterials as they have higher specific stiffness and specific strength. Sun and Pugno [209] proposed a hierarchical auxetic cylindrical tube based on re-entrant hexagonal structural configurations and investigated its effective elastic properties based on Euler–Bernoulli beam theory (see figure 8(a)). This hierarchical tube exhibits higher resistance against fiber pullout, generating superior strength and toughness [209]. Hierarchical auxetic honeycombs designed based on a re-entrant structure also show superior effective stiffness. As shown in figure 8(b), hierarchical re-entrant metamaterial with star-shaped sub-structural unit cells was proposed [210]. Thus, hierarchical re-entrant mechanical metamaterials exhibited large auxetic behavior and high specific stiffness by controlling their parent and sub-structural parameters [210].
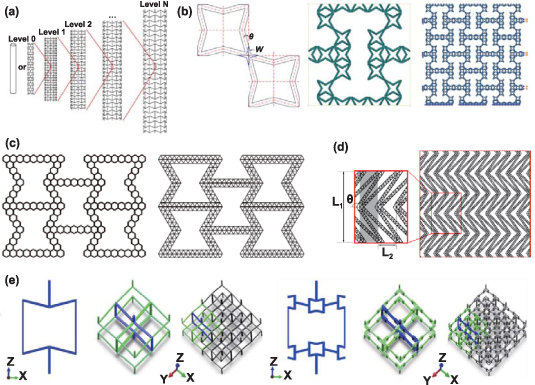
Figure 8. Stiff auxetic mechanical metamaterials with hierarchical design: (a) hierarchical auxetic cylindrical tube (Reproduced from [209]. CC BY 4.0), (b) hierarchical re-entrant metamaterials with star-shaped subordinate cells (Reproduced from [210]. CC BY 4.0), (c) hierarchical re-entrant hexagon (Reprinted from [211], Copyright (2019), with permission from Elsevier), (d) double-arrowed (Reproduced from [92], with permission from Springer Nature) honeycomb with conventional lattice substructure, and (e) vertex-based hierarchical re-entrant structure Reprinted from [212], Copyright (2022), with permission from Elsevier.
Download figure:
Standard image High-resolution imageAs shown in figures 8(c) and (d), conventional lattice structures were also used in the hierarchical design of stiff auxetic materials. Compared with the original re-entrant honeycomb, hierarchical re-entrant honeycombs with cell walls built by a hexagonal and triangular lattice exhibited 298% and 108% improvement in the mean crush force under quasi-static loading [211], resulting in 292% and 105% improvement in the specific energy absorption indicators [211]. Rayneau-Kirkhope [92] fabricated a similar hierarchical re-entrant structure with a sub-structure consisting of the conventional lattice, as shown in figure 8(d). They used double-arrowed and re-entrant hexagonal structures as the main structure to obtain high stiffness and strength [92]. Shen et al [212] showed that vertex-based hierarchical re-entrant structure could also generate higher Young's modulus than its original structure with specific geometrical parameters. In their vertex-based hierarchical re-entrant structure, the original connections of the re-entrant structure were replaced by a smaller re-entrant sub-structure at different scales (see figure 8(e)) [212].
As shown in figure 8, most of the hierarchical auxetic structures with stiff mechanical properties are based on re-entrant structures and their structure at different structural levels were connected by more than two points. On the one hand, increased nodal connections significantly increase the resistance to the rational motion of connections, reducing degrees of freedom. On the other hand, when the ribs of the main structure are subjected to a bending load, the substructure in the ribs endure stretching deformation, owing to the mechanical benefits of hierarchical design, which can generate stiff auxetic mechanical metamaterials.
4.3. Stiff auxetic materials based on composite structural design
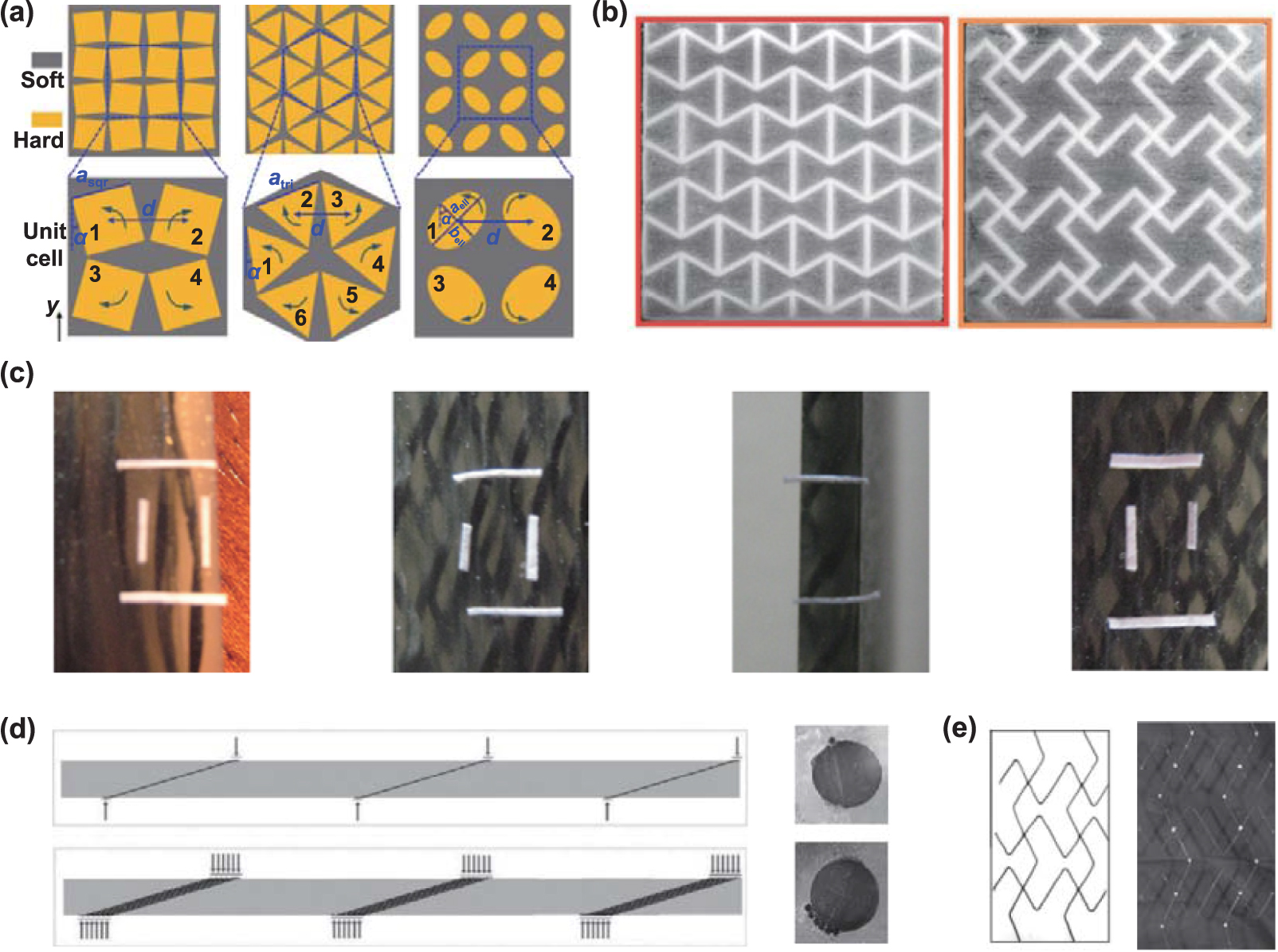
By introducing the second phase into the single structural phase auxetic material, a novel auxetic composite can be realized for improving the mechanical properties of single-phase auxetic material. Typically, composite materials or structures are composed of matrix and reinforcing phases in the matrix. An auxetic composite could be an auxetic matrix hybrid with a reinforcing phase, or an auxetic reinforcing phase hybrid with matrix. Auxetic behavior and enhanced modulus could be obtained if the ribs of the auxetic structure are not too slim [213]. For the convention composite, inclusions often have much higher stiffness or strength than the corresponding matrix. However, the stiffness of the auxetic composite could be significantly increased when inclusions have the same stiffness as that of the matrix [214]. The stiffness of an auxetic composite with soft matrix and hard auxetic inclusions relies on the structure and arrangement of the auxetic inclusions, as shown in figure 9(a) [215].
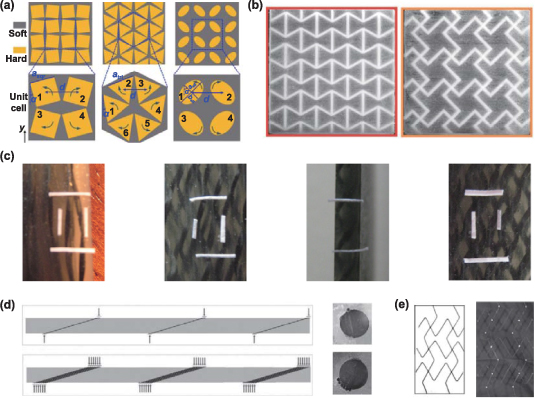
Figure 9. Stiff auxetic materials based on composite structural design: (a) rotate hard-particle reinforced composite (Reproduced with permission from [215]), (b) 3D printed auxetic composite (Reprinted from [218], Copyright (2018), with permission from Elsevier), (c) fiber composite with helical auxetic yarn reinforced (Reprinted from [144], Copyright (2012), with permission from Elsevier), (d) high stiffness auxetic composite yarns (Reproduced with permission from [221]), and (e) braided composites with missing rib structure Reprinted from [222], Copyright (2014), with permission from Elsevier.
Download figure:
Standard image High-resolution imageResearchers have also investigated the practical fabricated auxetic composite following the simulations or theoretical methods given above. For example, a 2D composite with a re-entrant structure frame shows higher stiffness and damping behavior [216]. Auxetic composites made from aluminum auxetic lattice and polymer filling matrix exhibit higher elastic modulus and strength compared to the original single-phase auxetic structure [217]. Auxetic composite fabricated using 3D printing shows enhanced stiffness, indentation resistance, and impact resistance, compared with traditional non-auxetic composites [132, 218]. As shown in figure 9(b), the auxetic composite reinforced by re-entrant honeycomb frame shows a nearly linear scaling relation [218]. Studies on the crushing behavior of auxetic composites have shown that auxetic composites could produce higher mean crushing force, compared with traditional non-auxetic reinforced composites [219]. Therefore, auxetic composites have potential in improving the energy absorption ability of single-phase auxetic constituent materials [217, 219, 220].
As shown in figure 9(c), carbon fiber was also used to fabricate a unidirectional fiber composite with helical auxetic yarn for reinforcement of mechanical performance [144], and stiffness up to 4 GPa and Poisson's ratio value of −6.8 were observed in their experiment. The stiffness of carbon fiber-based auxetic yarns can be improved further. Lolaki et al [221] used two or more stiffer yarns to fabricate auxetic yarns with high stiffness (see figure 9(d)). When the stiff warp yarns and elastic core were fabricated with fine steel wire and Nylon filament, auxetic yarns with an elastic modulus of 9 GPa and Poisson's ratio of −16.82 were realized. Subramani et al [222] fabricated and investigated braided composites based on missing ribs structural design schemes (see figure 9(e)), where the matrix, braid structure, and axial reinforcement of the braided composites are epoxy resin, polyester filaments, and glass fibers, respectively. Poisson's ratio of the braided composites can be tuned in the range of −0.3 to −5.2 by changing the initial geometric parameters [222].
4.4. Stiff auxetic cellular materials by adding additional ribs
Auxetic composite have large Young's modulus and strength. However, most of their materials are solid without pores, which increases their global relative density and decreases their physical properties and design space. Therefore, researchers introduced stiff auxetic cellular materials built by adding additional ribs.
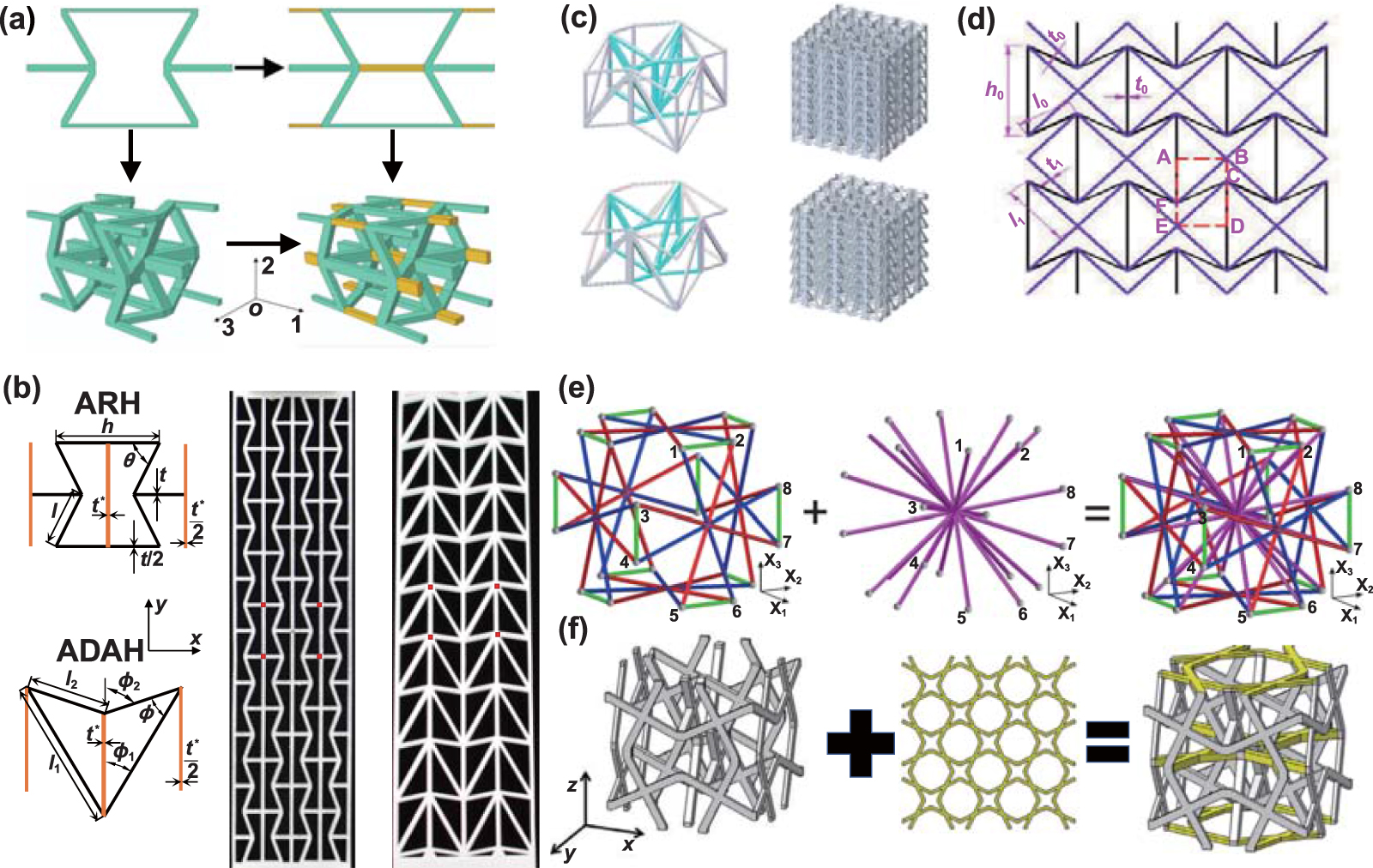
Adding ribs to the structure of the lattice material could significantly change its mechanical behavior. For example, the introduction of additional straight ribs into the diamond lattice along certain spatial directions can transform the deformation mode of the diamond lattice from bending-dominated mode to stretching-dominated mode. As shown in figure 10(a), Lu et al [91] added an additional horizontal rib (shown in yellow) in the re-entrant honeycomb to obtain an auxetic honeycomb with enhanced Young's modulus. For the convenience of description, this structure is short for ARH-H, and theoretical and numerical methods were used to investigate the elastic properties of the ARH-H. When the force constant of the additional ribs is smaller than that of the original horizontal ribs, the Poisson's ratio of ARH-H is negative. If only change the adding rib's force constant, there is a linear relation between Young's modulus and Poisson's ratio of the ARH-H. Young's modulus of an ARH-H could enhance by 800% compared with the original re-entrant honeycomb, while its NPR reduces by 27%. The yield strength of the ARH-H could be remarkably enhanced compared with re-entrant honeycomb [223]. 3D ARH-H also exhibited enhancement in Young's modulus and the linear relation between Young's modulus and Poisson's ratio [224].
Adding ribs along the vertical direction can generate different mechanical properties according to demands. Li et al [225] added straight ribs into the re-entrant and double-arrowed honeycomb along the vertical direction in order to design auxetic materials with enhanced mechanical properties (see figure 10(b)). Here, these structures are short for ARH-V. Experiment and numerical results exhibit that both the Young's modulus and strength of ARH-V could increase by 340% when the re-entrant angle is 60°, compared with their original honeycomb [225]. Poisson's ratio of ARH-V is independent of Young's modulus when loaded along the vertical direction. With the increase in Young's modulus, the corresponding Poisson's ratio does not change. Gao et al [226] also proposed a similar honeycomb where isotropic Poisson's ratio between −1 and 0 can be obtained by changing the structural parameter of auxetic structures. In addition, they transformed 2D honeycombs into 3D auxetic structures and proposed a feasible method to fabricate this 3D auxetic structure with high-performance continuous carbon fiber-reinforced polymer [227] (see figure 10(c)).

Figure 10. Stiff auxetic materials built by adding additional ribs into auxetics with traditional structural configurations: (a) adding horizontal ribs in 2D and 3D re-entrant structures (ARH-H) (Reprinted from [91], Copyright (2016), with permission from Elsevier. Reprinted from [224], Copyright (2017), with permission from Elsevier), (b) adding vertical ribs in 2D re-entrant structure (ARH-V) (Reprinted from [225], Copyright (2019), with permission from Elsevier), (c) 3D tree-like structure (Reprinted from [227], Copyright (2021), with permission from Elsevier), (d) adding rhombic honeycomb in 2D re-entrant structure (Reprinted from [228], Copyright (2017), with permission from Elsevier), (e) adding diagonal elements in 3D radially-foldable structure (Reprinted from [139], Copyright (2016), with permission from Elsevier), (f) and adding star structure in 3D cross-chiral structure Reprinted from [231], Copyright (2017), with permission from Elsevier.
Download figure:
Standard image High-resolution imageThe mechanical benefits of adding ribs to the auxetic structure are not limited to Young's modulus and strength. When the rhombic honeycomb was added into re-entrant honeycomb, novel auxetic structure with increased in-plane Young's modulus and buckling strength can be realized [228]. As shown in figure 10(d), when the rhombic honeycomb is rotated by 90°, bilinear elastic characteristic can be realized, making use of local buckling deformation features [229]. Addition of sinusoidal-shaped ribs in the re-entrant honeycomb enhanced energy absorption [230]. This was determined using two structures: model 1 involved the two sinusoidal-shaped ribs into the classical re-entrant honeycomb, while model 2 involved the addition of extra vertical rib along with the sinusoidal-shaped ribs. Model 2 showed the highest plateau stress and highest energy absorption capacity among re-entrant honeycomb, model 1, and model 2.
Analytical results showed that adding additional ribs could help adjust the anisotropic properties of auxetic materials and transfer the original anisotropic auxetic mechanical metamaterials into isotropic samples. The introduction of additional diagonal structural components into the 3D radially-foldable structure can transform a novel 3D auxetic structure into isotropic, as shown in figure 10(e) [139]. Similarly, the addition of a star structure in a 3D cross-chiral structure will lead to a uniform auxetic behavior in three principal directions with all on-axis Poisson's ratios closer to the limit of −1 [231], as shown in figure 10(f). Compared with the original 3D cross-chiral structure [232], the addition of star structure enhances the energy absorption efficiency and show higher capability of energy absorption [233].
Figure 11 shows a comparison of stiff auxetic materials built with hard constituent material, additional adding ribs, hierarchical methods, normalized Young's modulus and yield strength versus relative density for these auxetic materials. Here, the effective Young's modulus  and yield strength
and yield strength  of the auxetic materials were normalized by the Young's modulus
of the auxetic materials were normalized by the Young's modulus  and yield strength
and yield strength  of their base materials. In general, materials with higher Young's modulus and yield strength of the same relative density exhibit better stiff properties. Compared with hierarchical and hard constituent material methods, adding additional ribs in original auxetic structures is a more effective method for obtaining stiff auxetic materials. As shown in figures 11(a) and (b), the normalized Young's modulus and yield strength of auxetic materials built by adding ribs method are much higher than that of the hierarchical design and hard constituent material methods.
of their base materials. In general, materials with higher Young's modulus and yield strength of the same relative density exhibit better stiff properties. Compared with hierarchical and hard constituent material methods, adding additional ribs in original auxetic structures is a more effective method for obtaining stiff auxetic materials. As shown in figures 11(a) and (b), the normalized Young's modulus and yield strength of auxetic materials built by adding ribs method are much higher than that of the hierarchical design and hard constituent material methods.
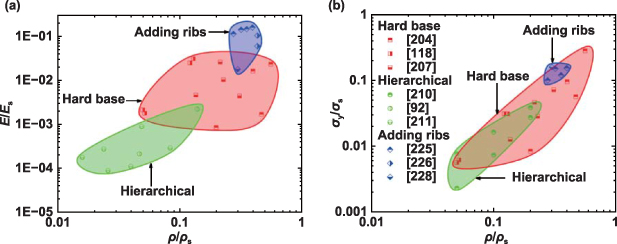
Figure 11. Comparison of mechanical properties of stiff auxetic materials built with different methods: (a) normalized Young's modulus; and (b) yield strength.
Download figure:
Standard image High-resolution image4.5. Stiff auxetic cellular materials built by other methods
In addition to the above-mentioned methods, there are many other methods to design stiff auxetic materials. Topological optimization can effectively design stiff auxetic materials [200]. Schwerdtfeger et al [103] developed a special regularization technique-enhanced topological optimization method combined with a given auxetic structure to obtain auxetic materials with a Poisson's ratio of approximately −0.58 and Young's modulus of approximately 1.34 GPa. The topological optimization method based on the parametric level set method and numerical homogenization method can be used to obtain a series of auxetic materials with nonlinear gradually stiffer properties [234]. The obtained structures were manufactured with additive manufacturing, and their properties were verified through simulation and comparison of compression experiments [234].
Structural hybrid combination is an effective method to design stiff auxetic materials. The combination of rotated re-entrant structures with rational spatial symmetrical operations can help in the fabrication of 2D and 3D auxetic structures with high stiffness [235, 236]. A previous study combined the re-entrant, trichiral, and anti-trichiral deformation mechanisms to obtain auxetic materials with high stress, low strain, and large NPR along particular directions [237]. In addition, the combination of re-entrant structures with star-shaped structures [238, 239] or re-entrant structures with double arrowed structures [240] could be used to obtain auxetic structures with increased energy absorption capacity. If the inclined and non-inclined walls are designed with different thermal expansion coefficients, the effective thermal expansion coefficients of the combined structures can be negative [236].
Mass distribution optimization along struts, cross-section shape design of cell wall, and composite multi-phase structures are also effective methods for designing stiff auxetic mechanical metamaterials. Auxetic structures obtained by mass distribution optimization along strut axial directions can exhibit high plateau stress and high plastic collapse and can absorb more energy without changing their stiffness [241]. Anti–tetra-chiral structures composed of rolled cross-section ligaments were proved to have enhanced energy absorption performances compared with anti-tetra-chiral structures with straight ligaments [242]. Inspired by particle and fiber-reinforced composites, multi lattice auxetic structures were proved to have high strength and high energy absorption performances [243].
5. Applications of soft and stiff auxetic materials
Soft and stiff auxetic materials can be used in different areas according to mechanical performance demands.
5.1. Industrial applications of soft auxetic materials
Auxetic textile materials can be used as apparels [21, 145], such as maternity dresses [145], children's wear, garments, and shoes [244]. The lateral expansion of auxetics under axial loading can generate double-curvature features under bending. Thus, maternity dresses made from auxetic textiles can exhibit lower stress concentrations and can be more comfortable to wear compared with conventional maternity dress (figure 12(a)). Figure 12(b) shows sports shoes made of auxetic structures manufactured by Under Armour company and Adidas company. Both the sole and vamp of the shoes are made of auxetic structures, and the auxetic structure of the sole exhibit better capacity of the buffer as they can generate superior energy absorption capability.

Figure 12. Applications of soft auxetic materials: (a) maternity dress (Reprinted from [145], Copyright (2019), with permission from Elsevier), (b) sports shoes, (c) skin-mounted electrophysiological sensors (Reproduced from [192], with permission from Springer Nature), (d) auxetic conductive cardiac patch ([248]. John Wiley & Sons. © 2018 The Authors. Published by WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim), (e) 3D printed auxetic scaffold (Reprinted from [251], Copyright (2021), with permission from Elsevier), (f) auxetic stent (Reproduced from [16], with permission from Springer Nature), (g) auxetic stretchable sensor ([259]. John Wiley & Sons. © 2018 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim), and (h) 4-degree-of-freedom actuator From [263]. Reprinted with permission from AAAS.
Download figure:
Standard image High-resolution imageAuxetic textile materials can also be used as smart bandages [17]. For example, the wound-healing agent can be filled into auxetic textiles. When the wound swells, the micro holes of the auxetic textile will open up space and release the wound-healing agent. When the wound heals, the micro holes of auxetic textiles within the bandage will close and stop releasing the wound-healing agent [21]. In addition, soft auxetic materials are a perfect candidate for biomedical device applications as they can exhibit multifunctional physical properties [245]. The skin of humans and animals often exhibits nonlinear 'J-shaped' stress–strain curves [78, 246, 247] and NPR [78]. This unique mechanical behavior can be precisely mimicked with soft auxetic materials consisting of horseshoe microstructure [192, 196]. Therefore, these soft auxetic materials can be used as skin-mounted shape-morphing conformal electrophysiological sensors [196] (figure 12(c)). Kapnisi et al [248] introduced an auxetic conductive cardiac patch for the treatment of myocardial infarction (figure 12(d)). They reported that auxetic conductive cardiac patches exhibit better native heart movement conformation performances compared with unpatterned patches because its mechanical properties and deformation features can be designed to match the native heart tissue [248].
Tissue engineering scaffold is an important application of soft auxetic materials. For example, scaffolds with tunable Poisson's ratio are more suitable for emulating the mechanical behavior of native tissues [249, 250]. Tissue engineering scaffolds with NPR properties exhibit higher cell growth efficiency [251], proliferation [250, 252], and secreted collagen [253]. Figure 12(e) shows the fabrication of 3D printed auxetic scaffolds using thick and thin electrospun fibers, making use of the melting electro-writing technique [251]. These auxetic scaffolds can improve cell adhesion and growth performances remarkably [251]. Soft auxetic materials also show promising potential for stent applications. A previous study designed and fabricated an auxetic stent for the prevention of dysphagia and treatment of esophageal cancer [16] (see figure 12(f)). Wu et al [254] fabricated an NPR stent with high recoverability (diameter and length recovery ratio more than 95% and 97%, respectively) using a fused deposition modeling method and a biodegradable polymer. Vascular grafts with NPR can also exhibit higher compliance. The vascular scaffold with the middle layer of the NPR structure showed higher compliance of 1.7 times and 3.8 times higher than the scaffold with positive Poisson's ratio and commercial polytetrafluoroethylene vascular grafts, respectively [255]. In addition, soft auxetic materials can also be used as skin grafts, active skin [256, 257], and neck braces [258].
Soft auxetic materials are the perfect choice for designing stretchable electronics. Some examples include stretchable strain sensors [259, 260], nanogenerators [261], and stretchable conductors [262]. As shown in figure 12(g), the sensitivity of the sensor with the NPR frame can be more than 20 times higher than that of conventional sensors because of the synergistic contribution of the NPR effect and strain concentration [259]. Strain sensors consisting of hierarchical auxetic structures could exhibit high repeatability (⩾104 cycles), linearity, and low hysteresis under strains up to 50% [260].
Figure 12(h) shows an auxetic actuator based on shearing auxetic deformation features [263]. A previous study proposed an actuator with 4-degree-of freedom to realize complex movement by combining four shearing auxetic cylinders with right- and left-hand behavior [263]. The flexural [264, 265] or twisting [264] motion of a single-cylinder tube was also manufactured with an NPR microstructure. Soft auxetic materials can be used for constructing soft robotic devices [266]. Liu et al proposed a soft crawling robot with a perception and motion module using auxetic structures, which can realize advancement and rotation movements easily [267].
Soft auxetic materials can also be used as acoustic isolation/phonic crystals. The elastic band gaps of soft auxetic material can be continuously controlled by harnessing uniaxial tension [268]. The vibro-acoustic performances of auxetic mechanical metamaterials can be rationally tuned and programmed through the graded arrangement of auxetic structures in annular cellular structures [269].
5.2. Applications of stiff auxetic materials
Some of the human tissues and organs are required to endure external loading; thus, stiff mechanical properties are mandatory. For example, an artificial intervertebral disc with NPR effect can prevent bulging mechanical deformation, which can induce an external load on the lumbar intervertebral disc [270]. Figure 13(a) shows a hybrid metamaterials-based bone implant (hip stems) structure consisting of a unit cell with NPR and a positive Poisson's ratio [271]. This meta-implant could improve the implant-bone contact under complex biomechanical loading and potentially implant longevity [271]. Stiff auxetic materials can also be used as bone screws. Yao et al [272] fabricated auxetic bone screws based on the 3D-printing method (see figure 13(b)) and reported that these screws could improve their bone-screw fixation stability [272].

Figure 13. Applications of stiff auxetic materials: (a) meta-implants (Reproduced from [271] with permission from the Royal Society of Chemistry), (b) auxetic bone screws (Reprinted from [272], Copyright (2020), with permission from Elsevier), (c) bullet ([273]. John Wiley & Sons), and (d) blast resistance materials Reprinted from [10], Copyright (2016), with permission from Elsevier.
Download figure:
Standard image High-resolution imageStiff auxetic materials can be used in bullet design as the bullet made of auxetic material can significantly reduce the lateral expansion dimension of the bullet when it passes through the barrel. This further reduces the kinetic energy loss caused by friction between the bullet and barrel (see figure 13(c)) [273]. Stiff auxetic materials could also be used as blast resistance materials due to the NPR and mass flow effects. A numerical study showed that the maximum back facet displacement of NPR composite panels under blast loadings was reduced by up to 30% compared with monolithic ones. This finding exhibited the mechanical benefits of NPR effects of auxetic cores (see figure 13(d)) [10].
6. Outlook and challenges
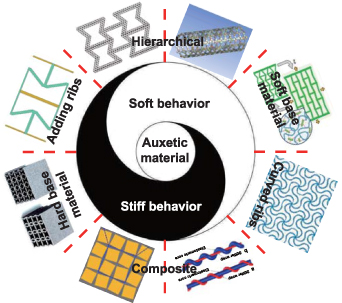
This review summarizes major advances in the design methods of soft and stiff auxetic materials, including auxetic cellular materials, auxetic textile materials, and auxetic composite. An overview of classical methods used for designing soft and stiff auxetic materials is shown in figure 14. In this paper, several methods to design and fabricate soft or stiff auxetic materials were reviewed. These methods include soft constituent material, hierarchical design, textile, curved ribs, hard base material, transfer to the composite, and adding additional ribs. In general, fabrication using soft constituent materials and curved microstructure ribs can improve the soft properties of auxetic material. Fabrication using hard constituent materials and adding additional ribs into the original microstructure can be used to efficiently design novel stiff auxetic materials. The hierarchical design of auxetic microstructure could lead to soft or stiff auxetic materials according to demands. In addition, textile and composite auxetic materials can be designed to be either soft or stiff based on their geometry and constituent materials. With respect to their applications, soft auxetic materials can be used as apparel, biomedical devices, smart scaffolds, stretchable electronics, acoustic isolation materials, and smart actuators. In comparison, stiff auxetic materials can be used as medical implant devices with stiff properties, such as artificial intervertebral discs, hip stems, and bone screws. In addition, stiff auxetic materials are the perfect candidate for bullet and blast resistance materials and structural applications.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
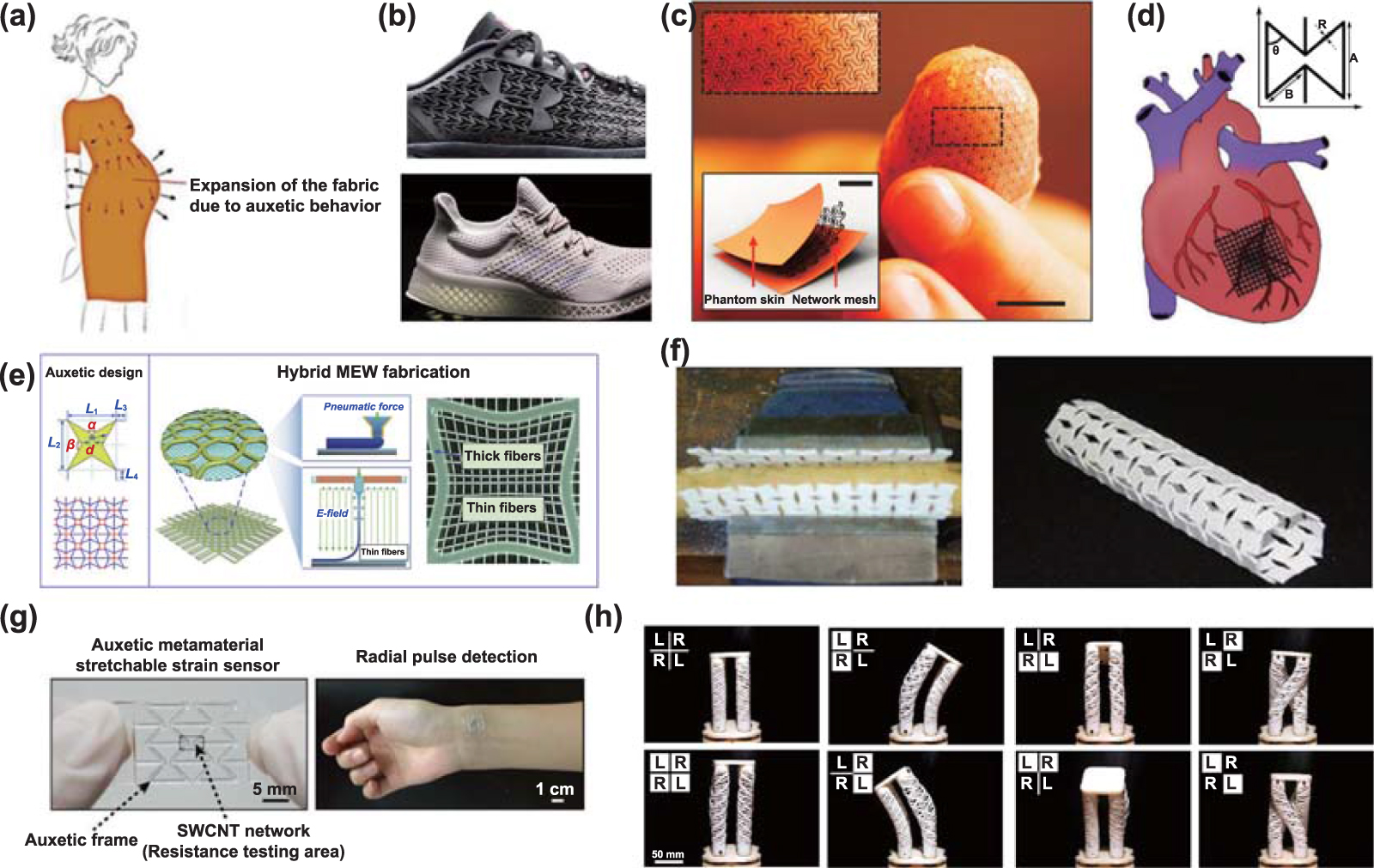{kind=link}
{kind=link}
Figure 14. Overview of the methods to design soft and stiff auxetic mechanical metamaterials.
Download figure:
Standard image High-resolution image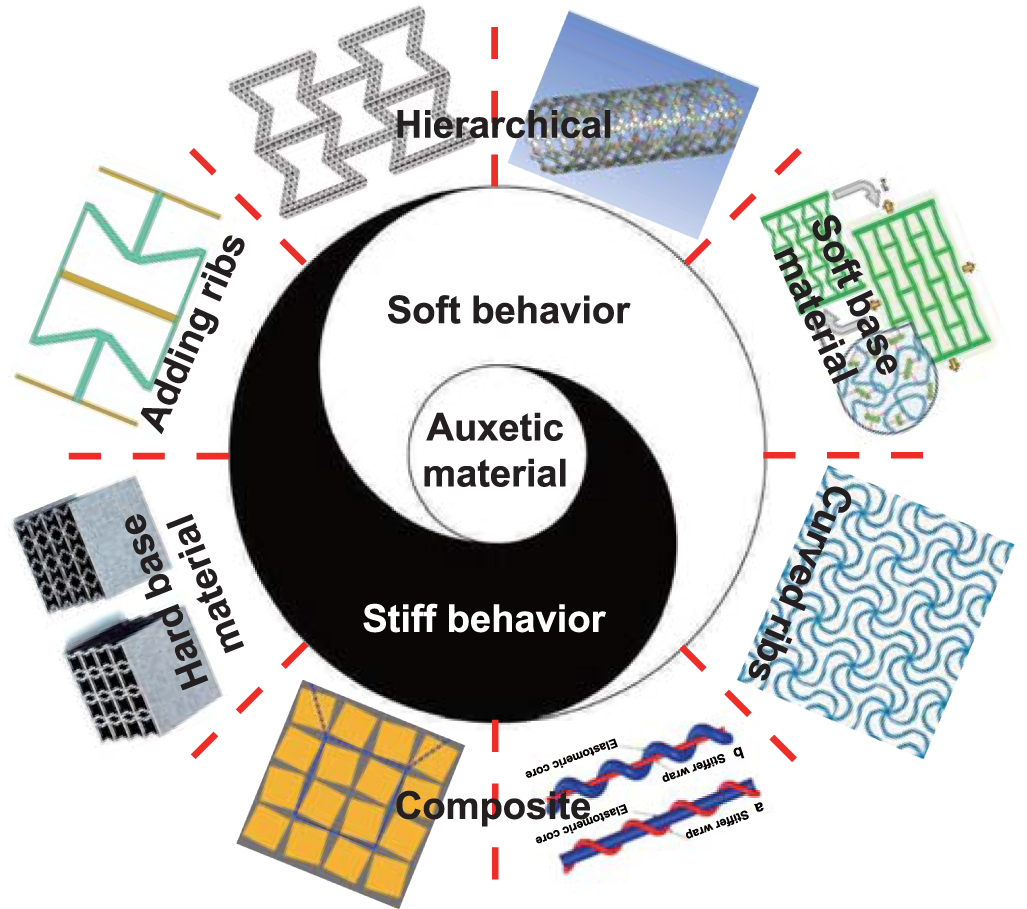{kind=link}
The design and fabrication methods reviewed in this paper can efficiently fabricate soft and stiff auxetic mechanical metamaterials. Nevertheless, more research works on soft and stiff auxetic materials should be done to satisfy the multifunctional and harsh service requirements of future engineering. In the future, the following research directions will be worth for investigations:
- 1)Real industrial applications of soft and stiff auxetic materials. Although soft and stiff auxetic materials have some applications, their widely practical applications are still limited, particularly for stiff auxetic materials. Since fracture toughness and fatigue are important mechanical properties for engineering components in real applications, future studies should focus on the fracture toughness and fatigue of soft and stiff auxetic materials.
- 2)Design 2D and 3D soft or stiff auxetic materials with extreme or multifunctional properties. More 3D soft and stiff auxetic materials should be proposed and investigated. In the case of soft auxetic materials, designing novel structures with programmable total stress–strain curves and Poisson's ratio behavior, rather than elastic properties, under small elastic deformation are more useful. Stiff auxetic materials with extremely high stiffness and strength, as well as high fracture toughness, have wide potential applications in engineering structural components. Soft and stiff auxetic materials with programmable acoustic, thermal, mechanical, shape transformation, electronic, optical, or even chemical performances will provide choices for acoustic isolation, biomedical devices, biomedical implants, smart actuators or robots, and stretchable electronics applications.
- 3)Challenges in manufacturing soft and stiff auxetic materials. Manufacturing techniques with functional constituent materials should be of great scientific meaning for the design and fabrication of auxetic materials with multifunctional properties. Soft materials that experience extremely large deformations may undergo failure due to defects during the fabrication process. Manufacturing techniques with extremely high precision and large manufacturing size should be developed in future work. 3D printing is an effective technique to manufacture auxetic materials with complex structures, large total sizes, and extremely small-featured sizes. Future works can also aim for developing fast manufacturing techniques with high precision and low cost.
Acknowledgments
These authors acknowledge the financial support from the National Natural Science Foundation of China (Grant No. 12102193); Shenzhen-Hong Kong-Macau Science and Technology Program (Category C) (SGDX2020110309300301); Key R&D Program from the Science and Technology Department of Sichuan Province (Key Science & Technology Project) (No. 2022YFSY0001); Changsha Municipal Science and Technology Bureau under the Grant kh2201035. The authors would like to thank enago (www.enago.cn) for providing English editing.