
Abstract
Soft robotics aims at creating systems with improved performance of movement and adaptability in unknown, challenging, environments and with higher level of safety during interactions with humans. This Roadmap on Soft Robotics covers selected aspects for the design of soft robots significantly linked to the area of multifunctional materials, as these are considered a fundamental component in the design of soft robots for an improvement of their peculiar abilities, such as morphing, adaptivity and growth. The roadmap includes different approaches for components and systems design, bioinspired materials, methodologies for building soft robots, strategies for the implementation and control of their functionalities and behavior, and examples of soft-bodied systems showing abilities across different environments. For each covered topic, the author(s) describe the current status and research directions, current and future challenges, and perspective advances in science and technology to meet the challenges.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 4.0 license. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
Introduction
1. Soft robotics: new generation of adaptable, self-morphing, growing robots
Barbara Mazzolai, Alessio Mondini, Emanuela Del Dottore and Laura Margheri
Bioinspired Soft Robotics Laboratory, Istituto Italiano di Tecnologia, Italy
Overview
Soft robotics aims at creating systems with high level of adaptability for operations in unknown and challenging environments and where a safer human-robot interaction is needed.
With the increasing vision of using robots beyond the structured industrial context, the spectrum of applications of soft machines is becoming remarkably broad. From natural environment exploration to human-made infrastructure inspection, from medicine to space, soft robots are of major interest because of their peculiar abilities of morphing, perception-based behavior, highly dexterous manipulation and versatile gripping, adaptive locomotion, anchoring, adhesion, and growing.
Much of the research in soft robotics is linked to biomimetics, thus living organisms are often considered as a model, because they are masters to put in place simplifying principles that make their sensory-motor behavior efficient and highly flexible to respond to dynamic changes. The secret of natural systems lies in the smart characteristics of how their body is designed and in how their intelligence is embodied and distributed in it, allowing them to effectively adapt, grow and survive. And here lays the link with soft robotics: similarly, soft robots benefit of the use of smart and multi-functional materials (gels, elastomers, biological materials, etc) and of a body compliant with the external environment. Intelligence is also integrated in the body ('embodied') and co-develops with it, emerging from the interaction of the body itself with the world. This way, soft robots' sensory-motor behavior becomes more efficient in responding to dynamic changes, as for living organisms.
Started in the years 2006–2008 as a niche of robotics, soft robotics is now a well-known sector, with a proactive and well-connected community of researchers world-wide [1]. Not only robotics engineers, but also biologists, computer scientists, mathematicians—just to mention a few—are part of the community of soft robotics.
Particularly relevant, is the link between soft robotics and material science and the mutual benefits that the corresponding communities are reaching. Using soft, multi-functional, material structures for the design of new forms of actuation and sensing, together with new modeling and control architectures, soft robots have been allowed to achieve different abilities such as jumping [1, 2], peristaltic locomotion [3], elongation and shortening [1], climbing [4], stretchability [5], adaptable grasping [6, 7], combined bending and stiffening [8], flying [9, 10], self-healing (SH) [11], self-morphing and growing [12].
For consolidating and pushing forward the abilities of soft robotic components and systems, a deep effort is necessary towards an advancement of materials chemistry, mechanics, as well as novel fabrication techniques for systems development and robust materials interfacing. A cross-fertilization of disciplines that is beyond the currently widely claimed multidisciplinary approaches, guiding a design that merges together aspects of the natural and the digital environment.
Roadmap organization and aim
With a highly multi-disciplinary background of scientific and technological sciences, this Roadmap on Soft Robotics aims at covering some of the major aspects of components for the design of soft robots and especially of the role of multi-functional materials in improving soft robots' behaviors and peculiar abilities.
The roadmap includes different sections with a description of current status, current and future challenges, and a perspective of needed advances in science and technology to meet the challenges for different components and systems.
Experts in technologies for soft actuators design and development, bioinspired materials, control of soft robots' functionalities and behavior, and design of soft-bodied systems at macro and nanoscale, have contributed to this work.
The main objective of this document is to give an overview of the current state of the art of the field and to draw the attention on the main challenges that researchers could tackle to advance the area with both scientific and technological impacts.
The intended audience includes both young researchers and students that are approaching the topic, and experienced researchers that are interested in having a reference and reading about possible open questions and perspectives.
Thanks to the multi-disciplinary characteristics of the field of soft robotics, all the sections could be relevant for many areas of engineering, as well as for material science, biology, or computer science.
Open challenges and perspective
Soft robotics is still in its first ramp-up phase of research in terms of technological maturity and systems applicability. Since the first years, the field has been characterized by a multi-facet scenario, investigating unconventional materials, studying the relations between morphologies and functionalities, challenging problems of self-organizations, self-stability and self-assembly [13].
This multi-disciplinary mark is still maintained, as demonstrated along this Roadmap, encompassing new technological solutions and challenges for multi-functional bioinspired materials, different types of soft and variable stiffness actuators, new models of control architecture, and presenting integrated systems from macro to micro scales. This is a core feature for the field, and a fascinating characteristics for all the researchers who come from different sectors and can meet and share different know-how.
In soft robotics, the link across the research for innovative technologies and the pursue of scientific discoveries with biological investigations on natural models is strong and bidirectional.
Looking at the living world and taking inspiration from natural behaviors, adaptive morphologies, energy-consumption strategies—which are all at the core of the soft robotics research—represent the fundamental steps towards the design of a new wave of robotic solutions that are not only more relevant in real-world scenarios, but also more sustainable.
As soft robots are on the rise with a lot of promising applications, we need not only to pose and respond to new ethical and legal questions, but also deal with ecological and global health issues. The community of robotics is in fact starting to discuss more deeply how to design the new generations of technologies in order to be better integrated in our world without affecting it, energetically or with new tons of e-waste [14–16].
Soft robotics can be a game changer to effectively design artificial systems with a null impact in the biological world. Soft bioinspired robots of the future will be able to adapt and evolve, will be made of recyclable or biodegradable or biohybrid materials, and will use renewable forms of energy without weighing on the natural ecosystems energy balance.
Similarly to natural systems, these green soft robots will be developed to follow a life-like circle and to better integrate into the natural ecosystem, creating a new wave of environmentally-responsible machines [15].
2. Electro-responsive elastomeric actuators
Federico Carpi
Department of Industrial Engineering, University of Florence, Via di S. Marta, 3, 50139 Florence, Italy
Status
Among Electromechanically Active Polymers, which are 'smart materials' that deform in response to electrical stimuli, dielectric elastomer (DE) actuators [17] show the greatest potential for soft mechatronics [18]. They are capable of large electrically-induced strains and stresses, in some cases exceeding those of mammalian muscles [19]. As compared to electromagnetic motors, DE actuators (DEAs) have low specific weight, high energy density, fast response, self-sensing ability, scalable performance, low power consumption and silent operation, as well as an intrinsic mechanical compliance, which can also be electrically controlled [18].
An elementary DEA consists of a soft insulating membrane (made of silicone, acrylic or other elastomers), coated on either side with a compliant electrode material (e.g. carbon-loaded silicone), so as to obtain a deformable capacitor. When a voltage is applied between the electrodes, electrostatic forces squeeze the membrane, causing a reduction of its thickness and an increase of its surface (figure 1).
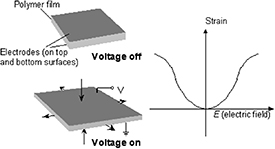
Figure 1. Working principle of an elementary DEA.
Download figure:
Standard image High-resolution imageThe effective compressive stress p can be quantified as [17]:

where  is the dielectric permittivity of vacuum,
is the dielectric permittivity of vacuum,  is the elastomer's relative dielectric constant, E is the electric field, V is the voltage and d is the membrane's thickness.
is the elastomer's relative dielectric constant, E is the electric field, V is the voltage and d is the membrane's thickness.
Due to their large electrical deformability, DEAs are studied as 'artificial muscles', especially for bioinspired machines. Examples include robotic fingers, grippers and arms, tuneable lenses for robotic vision, as well as terrestrial (legged, crawling and hopping), aerial and underwater robots [20]. As an example, figure 2 shows a hexapod robot [21], having soft legs made of the artificial muscle itself, such that structure and actuation were fused together. Each leg was a spring roll DEA, with multiple electrodes, which could be individually driven, so as to create bending motions according to multiple degrees of freedom. This solution, which is not possible with conventional motors, demonstrates how soft machines can simplify robotic design, avoiding complex mechanisms and reducing weight.
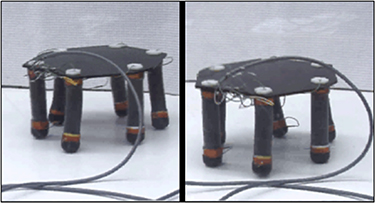
Figure 2. Example of a bioinspired robot using dielectric elastomers both as structural components (legs) and actuators (muscles). Reproduced from [22]. © IOP Publishing Ltd. All rights reserved.
Download figure:
Standard image High-resolution imageCurrent and future challenges
Due to non-linearities deriving from their hyper-visco-elastic properties, DEAs require special control strategies. These are still largely unexplored and, in the opinion of the author, their challenges are analogous to those for accurate control of the most used Soft Robotics technology, i.e. soft pneumatic actuators. Indeed, they are both based on hyper-visco-elastic bodies.
However, DEAs also raise distinctive challenges. One of them deals with attempts to harness electromechanical instabilities (especially snap-through instability), in order to obtain giant actuation strains; whilst feasibility has been proven [23], applicability to the majority of DEA-based devices and applications is not straightforward, requiring further developments. Differently, recent progress in addressing the following two additional challenges is showing interesting outcomes, with wide applicability.
High voltages
As a main limitation, DEAs need high driving voltages (typical order of 1 kV), which have the following implications.
In terms of electrical safety, the drawback is mitigated by the electrostatic principle of operation, which requires low currents. This allows for using electrically safe low-power sources [18].
In terms of size of the electronics, the low power requirement enables the use of compact, portable, battery-operated units [18]. However, any electronics in the kV range will always be bulkier (due to need for insulations) and more expensive (especially due to a lower market share) than any electronics working at one-order-of-magnitude lower voltages.
These limitations scale up as the number of degrees of freedom (i.e. independent DEAS) to be controlled increases, as they need either independent channels or ad-hoc strategies, such as multiplexing from a single high voltage source via high voltage transistors.
Overcoming such issues requires a reduction of the voltages in the range below 500 V, where highly compact electronics suitable for DEAs has been demonstrated [24]. Moreover, a few hundred Volts are typical for the low-size and low-cost electronics of common products like piezoelectric actuators.
Low forces
In order to actuate systems that have a size in the millimetres-centimetres range and have to be compact, lightweight and energy efficient, DEAs have significant advantages over conventional actuators. However, when it comes to large-scale and large-force systems, DEAs cannot compete with traditional electromagnetic, pneumatic or hydraulic drives. As the actuation performance is a direct consequence of the constitutive matter and physical principle of operation, clearly any technology always has an ideal range of optimal use. Nevertheless, attempts can be made to try to somewhat extend that range. For DEAs, increasing the maximum force output is a challenge addressed with various strategies, as discussed below.
Advances in science and technology to meet challenges
Reduction of the driving voltages
In order to reduce the voltages, according to equation (1) there are two approaches: (a) a long-term strategy is at the level of material synthesis and targets new elastomers with a higher dielectric constant [25]; (b) a short-term strategy is at the level of material processing and aims to manufacture thinner membranes.
In order to implement these strategies, the best materials of choice (in terms of environmental stability, reliability, versatility and low cost) currently are silicones. Even with off-the-shelf compositions, the possibility to reduce the thickness down to a few microns, while keeping adequate actuation capability, has been demonstrated [26]. This shows that DEA operation at a few hundred Volts might soon become standard practice, enabling more compact and cost-effective electronics.
As a downside, however, thinner membranes will require stacking of multiple layers, so as to preserve a desirable elastic force of the actuator. Therefore, multi-layer manufacturing is expected to play a key role in the future.
Increase of the output force
In order to increase the forces, two approaches have been described. The first one consists in combining a DEA membrane with springs acting as biasing elements able to amplify displacements and forces. A key breakthrough has recently been achieved with cone-shaped DEAs made of stacked membranes combined with a bi-stable mechanism, consisting of linear bias springs and negative-rate bias springs: an 86 × 86 × 25 mm3 actuator was able to produce a displacement of ∼3 mm and a force of ∼100 N, which was ∼200 times greater than the force achievable from conventional membrane DEAs [27].
A second strategy to increase the forces consists in combining DE actuation with electro-adhesion. A remarkable improvement has been achieved for bending-type DEAs wrapping around an object (e.g. for grasping), using a modified design of the electrodes, which enhanced the fringe electric fields at their edges: the fringe fields were able to significantly polarize the object's surface, so as to generate attractive (electro-adhesive) forces, exchanged with the electrodes' charges; with this approach, a low DEA force (1 mN) was complemented with a high electro-adhesive holding force (3.5 N shear force for 1 cm2), greatly improving the grasping performance [28].
Concluding remarks
DEAs offer significant opportunities to develop electrically controlled bioinspired robotic machines. They advantageously enable effective mimicry of biological 'behaviors' (e.g. types of motions) and properties (e.g. in terms of combination of structure and function), to an extent and with a level of integration that are not possible with any conventional actuation system. Indeed, even in comparison with soft pneumatic actuators (as the most used technology in Soft Robotics), DEAs offer a unique combination of a soft body with direct electrical driving, overcoming the typical limitations of bulky driving units.
However, as compared to pneumatic actuators and other motors, DEAs require higher voltages and generate lower forces. Although successful strategies to circumvent these limitations have been demonstrated, DEAs appear today more suited as a complementary, rather than alternative, technology to them. Indeed, its advantages become progressively more evident as the size of the systems reduces, whilst conventional technologies increasingly show their limitations towards miniaturization.
3. Soft hydraulic muscle
Koichi Suzumori
Department of Mechanical Engineering, Tokyo Institute of Technology, Ookayama, Meguro, Tokyo 152-8550, Japan
Status
Suzumori proposed a new field in soft robotics, Power Soft Robotics [29]. One might think that soft robots generally have poor at power and force capacity, which results in safety and shape-adaptability, although this is not correct because power and softness are independent ideas and it is possible to realize robots that have both softness and power. Many examples that show both power and flexibility can be found in nature. The elephant trunk deforms very flexibly while it works very powerfully, giraffes fight by attacking each other's necks while the necks work flexibly at the same time to absorb the dynamic energy to protect themselves, and snakes kill animals that are bigger than their body by strangling them. Suzumori believes that power soft robotics is one of the most promising new fields in soft robotics, by which powerful and gentle rescue robots can be realized.
A key component in realizing Power Soft Robotics is a powerful and soft actuator. In particular, the hydraulic McKibben muscle is one of the most promising actuators currently in use. The McKibben muscle is one of the oldest artificial muscles [30] and is well-known and widely used today. It consists of a rubber tube and braided cords around the tube. Applying fluid pressure to the rubber tube results in expansion of the rubber tube in the radial direction, changing the blading angle of the bladed cords and causing the muscle to contract in the axial direction. Most specimens are driven pneumatically with air pressures lower than 0.7 MPa. Pneumatics higher than 0.7 MPa is not generally used [31] because highly compressed air easily stores big energy in it, which would have potential danger such as explosion and instantaneous unstable motion of actuator [32], while hydraulics can generally use a much higher working pressure, i.e. 7–35 MPa because of high incompressibility of water/oil. Applying high-pressure hydraulics to the McKibben muscles has great potential for pioneering Power Soft Robotics.
Several Mckibben muscles driven by a hydraulic pressure of approximately 5–7 MPa have been developed [33, 34]. Figure 3 shows an example of these, which can generate a maximum contracting force of 11.5 kN and a maximum contracting ratio of 30% by applying hydraulic pressure of 7 MPa.
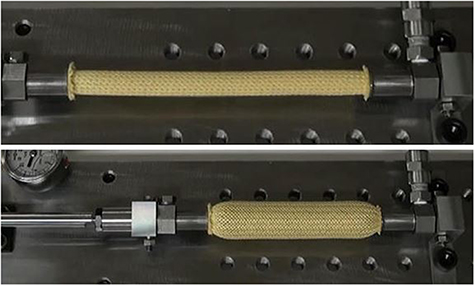
Figure 3. An example of hydraulic McKibben muscles [34]. Normal status with no hydraulic pressure applied (upper figure), where the outer diameter of the muscle is 13 mm. Contracting status (lower figure), where a hydraulic pressure of 7 MPa is applied; the muscle contracts to 30% of the original length.
Download figure:
Standard image High-resolution imageCurrent and future challenges
There have been several other studies on hydraulic McKibben muscles, but most of them are driven with pressures lower than 1 MPa [35]. As the contracting force is proportional to the applied fluid pressure, higher pressure is essential to demonstrate the hydraulic muscle's advantage. In our research team, we are working for hydraulic McKibben muscles driven by 10 MPa hydraulics using a new rubber material.
There are still several major issues and challenges. One issue is the material of the rubber tube, which requires physical strength and good elasticity: resistance to high pressure and large deformation ability, durability with respect to repeated deformations, small non-linearity, small hysteresis, and small creep behavior [36]. In the case of oil hydraulics, oil resistance is also essential. In addition, chemical resistance to weatherability is also very important. For example, resistance to ultraviolet light or low/high temperature is required in some environments where power soft robots will work. Because soft materials used in soft robots show generally poorer performance with respect to physical/chemical durability in comparison with stiff materials used in conventional robotics, material science should play a large role in soft robotics.
Hydraulics include oil hydraulics and water hydraulics. Generally, oil hydraulics are currently more popular for hydraulic actuators because there are various commercial components for oil hydraulics, and it is much easier to design oil hydraulic control systems than water control systems. However, most polymer materials have poor oil resistance, and the development of good rubber materials for McKibben muscles is an important issue.
The development of a compact hydraulic control system is another technical challenge. For example, small, cheap, energy-efficient pumps and servo valves are necessary. In the case of water hydraulics, rustproof control devices working under low lubrication conditions are necessary [37]. Flexible and thin hoses and small couplers, especially multi-channel swivel joints or slip rotating joints, are also challenging issues. In addition, all these devices are expected to be soft.
A power soft robot design method that fully takes advantage of hydraulic soft muscle properties is another challenge because it requires unique ideas that differ from conventional robot designs.
Advances in science and technology to meet challenges
Several studies of rubber materials with good strength and good elasticity, which include resistance to high pressure, large breaking elongation, high durability, small non-linearity, small hysteresis, and small creep behavior, have been conducted for use as a muscle tube [33, 34], resulting in several hydraulic McKibben muscles as shown in figure 3. Research is still ongoing to improve the rubber properties.
To maintain muscle softness under higher applied pressure, bundling thin muscles instead of using one thick muscle is a good approach. As the contraction force depends on the cross-section of the muscles or the total cross-sectional area of each bundled muscle, bundled muscles generate a force of approximately 80% of one muscle that has the same diameter because some dead areas exist between the thin muscles that do not contribute to the contraction force. While the force decreases by 20% with bundling, bundling realizes a contracting ratio larger than that of the original muscle. These interesting phenomena have been reported in pneumatic McKibben muscles [38, 39] and can be applied to hydraulic muscles. In this sense, extrusion molding processes of thin rubber tubes and the bundling process are now ongoing.
Many hydraulic devices for hydraulic control, such as pumps, valves, hoses, and couplings, have also been developed [34]. However, most of them were developed for larger and higher-pressure hydraulics. Miniature devices for lower-pressure systems than conventional hydraulics are required. In addition, new devices with soft bodies would greatly contribute to totally soft hydraulic muscles.
Figure 4 shows examples of soft power robots consisting of soft McKibben hydraulic muscles. To design a powerful long arm, shown in the right picture in figure 4, for example, combining contracting and extending muscles is essential. In general, a cantilever requires two portions on its cross-section to resist the bending moment: a portion supporting compressive stress, and a portion supporting tensile stress. The existence of both realizes bending stiffness and a bending moment [40]. In the elephant trunk, the same mechanism is involved. This type of unique design method to take advantage of hydraulic soft muscle properties is important for realizing power soft robots.
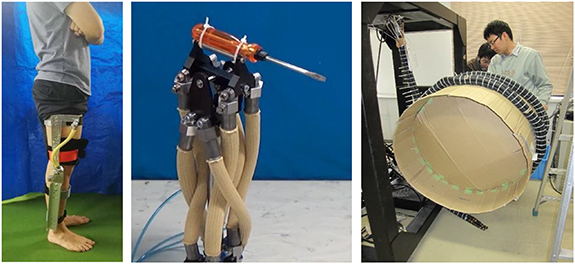
Figure 4. Examples of power soft robot applications of soft hydraulic muscles. Knee support device based on four-bar linkage and hydraulic artificial muscle [4] (left), rotational-compliant joint with hydraulic McKibben artificial muscles [42] (middle), and long bending rubber arm combining contracting and extending muscles [40] (right). Reproduced from [41]. CC BY 4.0.
Download figure:
Standard image High-resolution imageConcluding remarks
I believe that power soft robotics is a new, promising research field is, in which new soft robots with power and softness can be realized. For this purpose, soft hydraulic muscle is a key device. I believe that rubber materials, soft and miniature fluid control devices, and system integration methods are key technologies to realize power soft robots.
Acknowledgments
The work shown in this section was partially supported by JSPS KAKENHI Grant Numbers JP18H05465, JP18H03760, 26249028, and the ImPACT Program of the Council for Science, Technology, and Innovation.
4. Variable stiffness technologies for soft robotics
Matteo Cianchetti
The BioRobotics Institute, Scuola Superiore Sant'Anna, 56025 Pisa, Italy
Department of Excellence in Robotics & AI, Scuola Superiore Sant'Anna, 56025 Pisa, Italy
Status
The ability of varying the stiffness of a material or of a mechanism in a robot originates as a direct consequence of the use of soft and compliant materials in soft robotics. While on one side the use of soft materials enables a series of unprecedented capabilities, in general it also limits the maximum force that the robot can exchange with the environment. Excluding those cases where deformability, dexterity and intrinsic safety are important and sufficient for the intended task (e.g. morphing, inspection), usually it is necessary that the soft/compliant systems vary their stiffness. Tunable stiffness can be used to improve stability and force application, but it can also enable selective reconfigurability and variable kinematics (blocking/releasing degrees of freedom).
A stiffness variation can be obtained in three ways:
- Stiffening by deformation. An active soft actuator usually exploits its deformation to generate mechanical work and this deformation, in turn, causes a material stiffening;
- Stiffening by antagonistic activation. Active actuation technologies combined in pairs so that their action is equal and opposite to each other results in no deformation of the overall system, but with increase of stiffness;
- Stiffening (or softening) by variation of intrinsic properties. There exist some physical principles that can be exploited to develop semi-active actuation technologies.
The third option is gaining increasing attention, because it potentially provides higher compactness and it is decoupled from deformation. Moreover, these technologies can be also used as recoverable mechanical fuses and for mechanical energy dissipation. This group includes: shape memory materials (SMMs), electro- or magneto-rheological fluids (ERFs or MRFs), jamming transition (JT) and low melting-point materials (LMPMs). Note that, all these technologies increase the stiffness upon activation, except the last one, which on contrary softens.
Current and future challenges
Soft robotics is still at its infancy in terms of technological maturity and variable stiffness technologies are even younger. For this reason the current main challenges are related to the classic elements to be mastered in order to exploit a physical principle behind an observed macroscopic behavior as a new actuation technology [43]: (a) model the phenomenon; (b) explore material aspects; (c) develop a complete concept, including any structural involvement.
Optimal results on the material aspects have been already achieved in the study of SMM, but the research is still very much on the definition of usable and reliable models to describe the phase transformation phenomenon, which is very complex for the number of parameters involved in the process [44], although their use as variable stiffness systems (i.e. without involving deformation) slightly simplifies the approach.
Modeling is also the major limit of technologies based on JT [45]. The phenomenon is easy to observe, but more complex to be used properly. Modeling involves the description of interaction among several parameters of both the filler and the containing membrane, but the most limiting factor is represented by the difficulty in predicting the packing of the filler inside the membrane. This is easier for fiber and layer jamming provided that regular shapes and a limited amount of elements are used [46, 47], but it is very complex for granular jamming. Distinct Element Modeling (sometimes combined with Finite Element Modeling) and probabilistic approaches remain the only possibilities.
LMPM are based on simple phase transformation phenomena, thus the current challenges are mainly related to material science research aiming at achieving high stiffness variability with the lowest amount of provided heat. However, an adequate and complete structural concept is still under investigation, considering that the principle is based on the material passing from solid to liquid (and vice versa), that thus needs encapsulation too [48].
ERF and MRF suffer from the same encapsulation limitation, although the concept has been also extended to elastomers and networks [49]. For this class, materials reached a good level of maturity, but providing the triggering field still remains a bottleneck, since they require high electric voltages or the integration of (usually bulky) electromagnets.
Advances in science and technology to meet challenges
The main characteristics of the analyzed variable stiffness technologies are reported in table 1 along with the limitations identified in the previous section and labeled under one of three aforementioned elements.
Table 1. Summary of the characteristic performances of the main variable stiffness technologies (data adapted from [50–52]).
| Technology | Physical principle | Trigger | Energy consumption | Variation range | Soft state order of magnitude | Increase (decrease) stiffness velocity | Major current challenge | |
|---|---|---|---|---|---|---|---|---|
| Shape memory materials | Alloys | Phase transition | Heat | 102 W | 8–10× | 101 GPa | Fraction of seconds (seconds) | Model (complex interaction among multiple parameters) |
| Polymers | Glass transition | 101 W | 2–102× | 102 MPa | Seconds to minutes (seconds) | |||
| Rheological fluids | Electro- | Viscosity variation | Electric field | 101 W | 5× | 101 mPas | Fraction of seconds (N/A) | Material (high electric field) |
| Magneto- | Magnetic field | 100 W | 10–37× | 102 mPas | Structure (inclusion of electromagnets) | |||
| Jamming transition | Granular | Friction variation | Fluid | 102 W | 40× | 10° MPa | Seconds (fraction of seconds) | Model (complex interaction among multiple parameters) |
| Fiber | 5× | 101 MPa | ||||||
| Layer | 10× | 101 MPa | Structure (simple structures do not fully exploit the technology potential) | |||||
| Low melting-point materials | Alloys | Phase transition | Heat | 100 W | 25–104× | 102 kPa | Seconds to minutes (seconds to minutes) | Material (maximize phase transition velocity without compromising stiffness variation) |
| Wax | 103× | 101 kPa | ||||||
| Polymers | 86× | 10° MPa | ||||||
The limitations mentioned in modeling, often lead researchers to a trial-and-error approach, which can use direct comparison of results to identify trends or general design rules. On the other side, this method not only lacks of optimality, but reveals a further necessary advancement: the standardization of testing. Too often results are very different or even contradictory due to different testing conditions and interpretation of data.
Limitations related to materials are usually the result of a necessary compromise between mechanical and electrical (i.e. ERF) or thermal properties (i.e. LMPM), which can affect both the initial stiffness value and the variation range.
Structural design limitations refer to the necessity of elaborating novel design solutions to enhance the basic transduction principle and should aim at facilitating integration also at small scale. Fabrication is thus another important factor that requires improvements, especially for those technologies that involve manual steps or assemblies. However, the use of modern manufacturing techniques (such as additive manufacturing), which are more and more pervasive and affordable, could provide precise and repeatable production processes.
Unmet challenges also lead to devices that are not efficient and present high power consumption. However, while for ERF it is depending on material properties and structural design where there is room for improvement, for SMM and LMPM, efficiency is intrinsically low due to the underlying thermal principle exploited to obtain variable stiffness. Moreover, JT requires a different analysis and it is often subject of debate, because its efficiency depends on whether the fluidic source is included in calculations. The necessity of a further external device remains also a limiting factor on the portability of JT-based systems. Some solutions based on micro pumps have been proposed, but always negotiating with performances in terms of response time and generated pressures. Anyhow, in principle, a major advantage of this kind of systems remains related to the possibility to maintain stiffening without consuming energy (simply using normally closed valves).
Concluding remarks
The advancement rate related to variable stiffness technologies is nowadays very high, thanks to the growing interest gained by soft robotics and related technologies. However, in general, their level of readiness is not yet sufficient for being sustainable on large-scale applications.
To speed up the process, accuracy on terminology and standard procedures to interpret and report data may be extremely useful. 'Stiffness' (or 'rigidity' if referred to an overall and omnidirectional increase of resistance to mechanical deformation) is well-suited to define the behavior of the system in the elastic regime, but it should be noted that all these technologies can easily exceed their yield stress (sliding in JT, yielding in LMPM, flowing in ERF and MRF, stress induced phase transition in SMM). Although usually it is not easy to identify the separation point between the two domains, it would be important to include these data in the evaluation of variable stiffness technologies. Moreover, this transition leads to apparent and recoverable plasticity, which absorbs and dissipates energy. This further important functionality would deserve more attention to be better exploited.
Acknowledgments
This work was partially supported by the European Union's Horizon 2020 research and innovation programme through the SoftGrip Project under Grant Agreement No. 101017054.
5. Materials systems for soft robotics and architecture inspired by plants
Thomas Speck
Plant Biomechanics Group & Botanic Garden, and Cluster of Excellence livMatS @ FIT, University of Freiburg
Status
Plants are not the first choice if one looks for inspiration in bioinspired materials systems to be applied in soft robotics or motile structures in general. However, plants offer a plethora of inspirations, which are often overlooked as plant movements are typically too slow (e.g. growth processes) or too fast (e.g. motile traps in carnivorous plants) to be detected by the human eye [53]. Especially in the last two decades plant movements and the underlying structures have attracted increasing interest for the development of bioinspired materials systems [54, 55]. Detailed analyses of the form-structure-function relationships of plant tissues and organs, whose hierarchical structuring comprises up to ten orders of magnitude, and their scale overarching mechanical properties [56] allow the transfer of previously little-used or even unknown properties into novel bioinspired materials systems [54]. These developments include plant-inspired materials systems with high load-bearing and pronounced energy dissipation capacity at little mass [57], with various self-x-properties, as e.g. self-repair [58] or self-cleaning [59], but also motile systems for various fields of application in soft-robotics [60] and green architecture [54]. Of special importance for bioinspired compliant and motile materials systems as used in soft robotics and façade-skins is the finding that plants typically perform movements without localized hinges but by elastic deformation of larger regions of their tissues or organs (Figure 5 and 6) [53–55]. By this, stress concentrations, which are typical for pivot points in animal and conventional technical joints, are avoided and these plant structures are less prone to failure caused by overload and/or pronounced wear. For future technical applications, more studies on and an increasing development of plant-inspired material systems in general and mobile systems in particular will lead not only to more durable (e.g. less wear and tear and self-repair) but also to 'greener' (e.g. less material invest and maintenance) technical products, which can also combine high efficiency with aesthetics borrowed from nature [54]. In this way, plant-inspired materials systems and technologies may not only help to reduce the CO2 footprint but lead to novel smart solutions being of particular interest in soft robotics and architecture [54, 60].

Figure 5. Examples of plant-inspired soft robots and architectural motile systems showing motion and/or actuation patterns inspired by the form-structure-function relationships of plants. (A)–(C): Façade-shading systems flectofold (A) and the biological role model water-trap plant (Aldrovanda vesiculosa) which traps close by motion-amplification caused by bending of the leaf mid-rib, shown in open (B) and closed state (C). (D), (E): Plantoid growing robot (D) inspired by the motion principles of growing roots (here: root system of a cotton plant Gossypium sp.) (E). (F), (G): Robot tendril using SMA searcher to braid with a parallel tendril (F) inspired by intertwining searcher twigs of lianas (here: Dutchmans pipe, Aristolochia macrophylla) (G). (H)–(J): Pneumatically actuated artificial Venus flytrap (H) combining motion principles of the Venus flytrap (Dionaea muscipula), which traps close by snap buckling of the two leaf halves, shown in open (I) and closed state (J), and of the water-trap plant (Aldrovanda vesiculosa) (B) and (C). (D) courtesy of Barbara Mazzolai, (E) wikimedia commons/public domain, (F) Reproduced from [61]. CC BY 4.0.
Download figure:
Standard image High-resolution image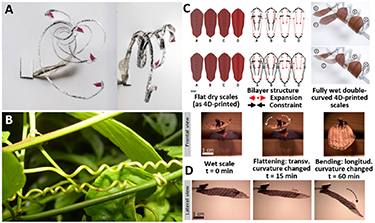
Figure 6. Examples of plant-inspired soft robots and architectural motile systems using materials systems and actuation modes inspired by plant models. (A), (B): Bioinspired artificial tendrils using osmotically actuated materials systems for twining around a support (A) and the twining tendrils of the passion flower plant (Passiflora coccinea) (B) representing a biological role model. (A) Reproduced from [63]. CC BY 4.0. (C), (D): 4D-printed hygroscopically actuated scales for building envelops and roofs (C), and a seed cone (D) and seed cone scales from biological concept generator pine (Pinus wallichiana). Reproduced with permission from [64].
Download figure:
Standard image High-resolution imageCurrent and future challenges
Until recently, plant-inspired soft robots and other motile systems typically used motion and/or actuation patterns based on the form-structure-function relationships that cause motion in the model plants. Examples include plantoid growing robots inspired by root growth [12, 60], SMA robotic searcher twigs [61], cellular actuators [54], façade-shading systems flectofin and flectofold [54, 55], and various types of artificial Venus flytraps [62]. Despite their impressive functionality, these examples were largely produced and actuated by conventional technical materials and methods (e.g. plantoid: additive manufacturing; robotic searchers: shape memory alloys; cellular actuator and flectofin/flectofold: hydraulically or pneumatic actuated compound materials; AVTs: various technical materials). To use the full potential offered by motile plant structures inspiration should be taken also from the materials systems building the underlying structures that allow for their complex, highly robust and resilient movements. This transfer is still in its infancy, but recent studies using osmotically/hygroscopically actuated materials systems with (hierarchical) structuring inspired by twining tendrils [63] or pine cone scales [64] impressively prove the potential of such approaches. They allow for complex multi-phase movement patterns combined with considerable mechanical robustness of the motile structures. A major challenge for achieving complex and higher-dimensional shape changes at an acceptably short time range (< minutes) in macroscopic passive hydraulically actuated materials systems as used for soft robots or architectural elements (>10 cm) is the poroelastic time scale [53, 65]. To meet this challenge, flow rate depending motion speed has to be markedly improved, which could be achieved by structural speed boost mechanisms [53, 55], and long-term performance degradation of (most) hygroscopic materials must be addressed [65]. Today, plant inspired motile systems nearly exclusively use inspiration by nastic plant movements, i.e. movements pre-programmed in the materials systems and performing always in the same way after stimulation. This is often an advantage in technical applications [54], but represents only a minor part of the variety of plant movements. Of particular interest are tropistic movements (as e.g. chemo-, geo-, photo-, thermo-, thigmotropisms), which depend on the direction and (often) intensity of the triggering stimulus [53]. Tropistic movements are currently very rarely transferred in bioinspired applications [61, 66].
Advances in science and technology to meet challenges
Novel sophisticated methods for quantitatively analyzing and simulating the form-structure-function-relation on various hierarchical levels in plant role models and plant-inspired technical products were developed and accessible since the 1990s. Despite the fact that these methods, such as magnetic resonance imaging, confocal laser microscopy and environmental electron microscopy, provide new and fascinating insights into the hierarchical structuring and functioning of still 'living' biological structures, and even in 3D to a degree of detail that was previously hardly imaginable, such as micro-computed tomography, atomic force microscopy and x-ray diffraction (via beamlines) [55–57], multiscale mechanics and other functions as well as the structure-function relationship of plant models are (often) not yet sufficiently understood [67]. This holds especially true on the mesoscale, i.e. the size range between the higher micrometer- and the lower millimeter-range, which is of considerable interest for bioinspired motile structures. For this size range not only improved instruments for structural and mechanical analyses are desirable, but also better scale overarching simulation tools. For the transfer of plant-inspired concepts into technical applications new production methods, as e.g. 3D/4D-additive micro-manufacturing, 3D-braiding-pultrusion and laser spinning, enable for the first time the transfer of many outstanding properties of the biological role models into biomimetic products for reasonable costs. They allow to produce—like nature—complex materials systems and structures from small to big and to combine different hierarchical levels. Here a more pronounced transfer of the hierarchical structuring and an increased functionalization of the interfaces may help for a more sophisticated transfer. To make the best possible use of the inspiration of plant models for moving technical systems, also the materials used are of utmost importance. Many of the demonstrators developed today use materials (systems) like hydrogels, shape memory alloys, liquid crystalline elastomers, ionic polymer metal composites or DEs [57, 60, 62], which are very helpful to build proof-of-concept demonstrators but often lack sufficient long-term performance and stability and/or are too expensive for industrial application. Therefore, in addition to a further improvement in analyzing and simulation methods (especially in the meso-length scale) specifically novel more durable and in ideal case sustainable actuating materials are highly desirable.
Concluding remarks
Especially during the last ten years plant-inspiration for motile technical structures has become more and more visible and accepted. I am optimistic that the progress in science technology needed to address the above mentioned challenges will take place within the next decade. However, in addition to technical demands necessary for tapping the full potential plants offer for soft robotics and green architecture, there exists an increasingly urgent science policy problem: the number of organismic botanists being able to perform the necessary plant studies is constantly decreasing since the 1970s. The major reason is the increasing dominance of molecular biology in life sciences. This not only caused a decreasing interest of students in organismic biology but also an ongoing disappearance of the corresponding professorships. Keeping in mind the potential and increasing importance of organismic plant biology for biomimetics and for more sustainable future technologies this development represents probably the major thread and should be stopped.
Acknowledgments
This project has received funding from the European Union's Horizon 2020 Research and Innovation Programme under Grant Agreement No. 824074, and from the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) under Germany's Excellence Strategy—EXC-2193/1—390951807. The author thanks especially Falk Esser, Linnea Hesse, Simon Poppinga, Olga Speck and Marc Thielen but also many other colleagues of the Excellence Cluster livMatS and the FET-EU-project GrowBot for helpful discussions.
6. Sustainably grown: the underdog robots of the future
Stoyan K Smoukov
Active and Intelligent Materials Laboratory, Queen Mary University of London, London E1 4NS, United Kingdom
Status
Automata have captured people's imagination for millennia. From Ctesibius' water clock and moving owl more than two centuries B.C., recent integration with electronics and independent high-density power sources has produced today's mobile robots. These including rescue robots resembling dogs, snakes, and other animals. In humanoids, the last two decades' exponential developments have eclipsed the 2002–2004 humanoid RoboCup where just standing in place and kicking a ball was considered the top achievement. The recent demos by Boston Dynamics [68] of robots rebalancing after being pushed, as well as synchronized dancing skills, show the goal of a RoboCup team of robots beating the human world champion team by 2050 by FIFA rules is very much on track.
It is hard to imagine current approaches are lacking somewhere, yet they will not be applicable to the majority of robots in the near future. We are on the verge of two new transitions that will transform robotics. One is already under way—the miniaturization of robots, to the point where invisible, microscopic robots could be around us and inside us, performing monitoring or even life-saving functions. We have seen systematic bio-inspired efforts to create microbe-like, microscopic robots. The trend has parallels with miniaturization in the electronics industry, where exponentially smaller and more energy efficient units have been produced each generation. To put this statement in context, examples already include magnetic microswimmer robots, employing bacterial modes of locomotion, which are biocompatible, potentially ready for integration within our bodies. They require lithography to create clever microscopic screw-type structures [69], enough to produce the cork-screw swimming movement. Such micro-robots have encapsulated, picked, and delivered cells, protecting them from shear forces in fluids [70], while others have captured non-motile sperm, propelled them, and ultimately fertilized an egg [71]. We explore how such developments in micro-robots will change our world in the relatively near future.
The second trend is bottom-up robotics, growing robots from a solution medium, as if they were bacteria. This field is emerging at the intersection of a number of disciplines, discussed below. An overarching common theme is the creation of artificial life from a non-biological starting point.
Current and future challenges
Sustainability and energy efficiency are front-and-center issues as robotics becomes more useful, more affordable, and therefore more ubiquitous. This is especially true of microscopic robots that would be too small and cheap to collect and recycle traditionally. All current microelectronics and most micro-robots rely heavily on lithography for their manufacturing. This top-down method, though extremely precise, is rather wasteful. For highly integrated chips, a 20 g chip requires 1.7 kg of materials inputs [72]. Bottom-up sustainable approaches can mitigate/eliminate such waste.
E.g. inspired by plant roots, a robot created an embedded 'root' system building a tube around a 3D printing head that also doubled as a burrowing tip [73]. This creative additive strategy may greatly decrease the environmental impact and increase the versatility of architecture of embedded tube networks down to millimeters. New physical principles and interactions between building components are needed, however, for effecting growth of robots on the micro- and nanoscale to parallel that in biological cells and cellular components. The aim would be to 'grow' robots at the same cost as plants and bacteria, with a similar end-of-life decomposition cycle.
As micro-robots get smarter, a natural impulse is to integrate them with the electronics which we associate with computation. Smarter micro-robots could greatly enhance the field of electroceuticals [74], e.g. with their ability to relocate to different nerves and sense/deliver the right stimuli. It is also worth keeping in mind that in nature the most energy efficient computation devices, our brains, run on ionics, not electronics. Since 2007, huge gains in the field of ionic diodes [75] promise the creation of ionic logic and computation.
Creating artificial life is another blue sky challenge that may be achieved within the lifetimes of some present readers. On the small scale numerous challenges include how to harvest energy and integrate power systems, defining shape, enabling locomotion, environmental sensing, computation, enabling division, and eventually reproduction, heredity, and evolution. In this respect the goals of engineering robotics on the microscale overlap with those of synthetic biology in its purest form. In the next section we show significant progress in almost all the above areas starting from abiotic compounds.
Advances in science and technology to meet challenges
The smallest articulated swimmer (just <1 μm) is limited not only by the expense of lithography, but also by the inadequacy of simply miniaturizing large structures. New principles needed for movement at smaller length scales also afford simpler designs. Understanding self-assembly and phase behaviors of small molecules would let us grow them as plants and animals grow in nature, from nutrient media using internal programmed mechanisms. Materials science and robotics are currently in a stage of development of learning from life at those scales [76].
The discovery of artificial morphogenesis [77] from cooling, has allowed spherical oil droplets to transform in both sizes [78] and into shaped polymer particles [79]. Phase transitions yield regular 3D (icosahedra and octahedra) and quasi-2D geometric shapes (hexagons, pentagons, rhomboids, triangles, trapezoids and rods). Only two chemical components are needed besides water, to grow such shapes, and remarkably only two components also for producing flagellated active swimmers, which can be recharged from fluctuations in the environment [80]. Further functional integration in synthetic biology would let us mimic cells with minimal number of components [81].
A combinatorial approach to multifunctional polymers has recently removed the unpredictability of including extra functions in single molecules by interpenetrating multiple phases with their separate functions. Both simultaneous synthesis and sequential interpenetration are possible [82]. Combining ionic actuation and shape memory has achieved programmable movement [83], supercapacitor energy storage [84], and self-sensing muscles [85]. All these techniques are compatible with efforts under way to combine multi-functionality with bottom-up shaped polymer particles, to grow swimming, self-sensing, programmable and autonomous polymer robots. SH is being developed for materials to drive energy harvesting and storage in the next generation of micro-robots [86].
Peptide amphiphiles are now assembling gels and tissues with biological signaling and nanofiber materials with state-of-the-art tunable functionality. Recent structures with both covalent and non-covalent interactions expand greatly the ability for tunability, responsiveness and repair, as well as dynamic functional assemblies [87]. Sequence-defined polymers are aiming to play the role of proteins in new assembly and nano-robotic systems. Progress is being made in error-free sequence synthesis, reading sequences, and also developing the potential for repair and the creation of catalytically active analogues of enzymes [88].
Concluding remarks
The drive of micro-robotics towards artificial life is both fundamental and practical. Constructing a living system would be the most concrete possible answer to the Origin of Life, while also exploring minimum requirements and expanding the conditions under which it could thrive. Practically, a population of micro-robots could be persistently maintained under the right circumstances, though individuals die and decompose, consistent with the goals of sustainability.
Growing invisible microscopic robots bottom-up is the convergent goal of several different fields—from self-assembly of responsive materials, to bottom-up synthetic biology [89], to physics and chemistry of active matter. They all aim at reproducing aspects of life, both for understanding life's mystery, and re-creating life 'from scratch', as 'doing' is the ultimate form of 'understanding'. Reproduction in life is also the ultimate form of self-repair—with the promise of improvement and adaptation from generation to generation.
Acknowledgment
Acknowledging funding from the UK EPSRC fellowship (EP/R028915/1).
7. Wood and cellulose composites for material optimisation
Ingo Burgert1,2, Tobias Keplinger1,2 and Gilberto De Freitas Siqueira2
1Wood Materials Science, Institute for Building Materials, ETH Zurich, 8093 Zurich, Switzerland
2Cellulose and Wood Materials Laboratory, Empa, Swiss Federal Laboratories for Materials Science and Technology, 8600 Dübendorf, Switzerland
Status
The hierarchical structure and embedded functionality within plant cell walls equip even dead plant tissues with the capability to function as sensors and actuators. This makes plant organs and plant components excellent role models and building blocks for composite materials and systems with autonomous behavior for soft robotics applications.
In particular, the specific control of cellulose fibril orientation is a powerful tool as it allows for adjusting the composites stiffness and anisotropy and predetermines the pattern and magnitude of deformation and movement [90]. In this regard, the remarkable bending or torsional movements of pine cone scales and awns are excellent examples. Such bilayer deformation mechanisms can be easily transferred to bioinspired technical applications via the combination of thin wood layers with different fiber orientation utilizing the anisotropic swelling and shrinkage of the wood layers [91].
An alternative approach to develop cellulose composites for soft robotics applications is to extract anisotropic cellulose nanofibrils (NFCs) or nanocrystalss (CNCs) by disassembly of plant cell walls and use them as reinforcing fibrous phase in hydrogels or hydrophobic matrices for the adjustment of their mechanical performance and deformation behavior [92]. By controlling the cellulose building blocks alignment, not only stiffness can be tailored, but also mechanical anisotropy can be implemented and controlled [93]. Likewise bioinspired wooden bilayer structures, hydrogel composites can perform predetermined shape changes but with faster response times and larger deformability.
In addition to 'bottom up' nanocellulose assembly processes, increasing research activities follow a 'top down approach', which retains the beneficial hierarchical wood structure and cellulose directionality, but enhances deformability due to softening modification treatments. In this way, hierarchical cellulose scaffolds are produced, in which embedded responsive polymers and hydrogels provide soft robotics functionality [94, 95].
Current and future challenges
A major challenge of bottom-up processes, utilizing cellulose NFCs or cellulose CNCs as reinforcing phases in hydrogels and polymer matrices, are their energy intense disassembly and reassembly processes. These are also the limiting factors in reaching larger dimensions. However, great progress has been made by additive manufacturing techniques like 3D- and 4D-printing of cellulose-based composites, which allow the design of sophisticated structures with potential application in soft robotics [97]. The development of CNC/CNF containing inks with optimized properties for both, the extrusion process and the final state remains challenging, because the required shear thinning properties during extrusion restrain the nanocellulose ratio in the ink. Furthermore, in order to retain the printed filament dimensions of the final element under ambient conditions, the structures need to be freeze-dried. This restricts sample size and the ice crystal formation partly spoils the cellulose nanoparticles alignment achieved during the extrusion process. Main advantages, however, are the possibility to combine the cellulose building blocks with various polymer matrices and monomers, to control their degree of alignment in the final element due to shear and extensional forces upon printing and the freedom to design customized structures with relatively complex architectures.
Top-down approaches that utilize the structural hierarchy of dead biological tissues like wood for actuation and movements have less constraints regarding scaling but possess other limitations. The activation of rather rigid wood structures requires generation of high forces, which necessitate the interaction of cell walls with water. Volume changes of modifying agents, for instance of embedded thermo-responsive polymers, do not result in stresses being capable of sufficiently deforming the unmodified wood structure. Hence, without an additional functionalization or modification step only humidity changes are a sufficient stimulus for wood actuation, which certainly limits their applicability in the field of robotics. Moreover, the slow sorption processes result in long response times and therefore, only comparably thin bi-layer elements achieve reasonable actuation times.
A common limitation that can arise for both, bottom-up and top-down approaches is the limited repeatability of movements. When polysaccharides or proteins are used as building blocks, the systems will show viscoelastic behavior with creep and/or relaxation during actuation and movement. Carrying own weight or manipulating units with a certain mass may impede the infinite repeatability of robotic operations. Moreover, the natural variability of bio-sourced building blocks or structures can be a severe challenge as they hinder a precise prediction of the designated movement.
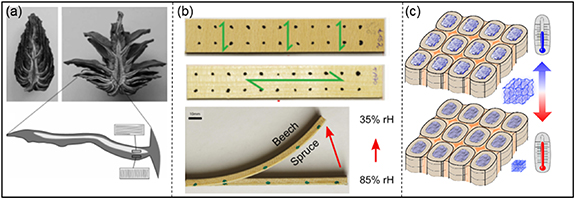
Figure 7. (a) A pine cone cut along its longitudinal axis, with one half wet and one half dry (mirrored in the image); drawing of the bilayer structure of the scale and the cellulose fibril orientations in the cell walls [90] reprinted with permission of The Royal Soc.. (b) Bioinspired wooden bilayer with different fiber orientation actuated by humidity change. Reproduced from [91]. CC BY 4.0. (c) In situ formation of PNIPAM hydrogel in the lumina of wood cells for wood materials with embedded temperature responsivity. [96] John Wiley & Sons. © 2016 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim.
Download figure:
Standard image High-resolution image
Figure 8. (a) Wood hydrogel bent in two directions can recover its original shape. [95] John Wiley & Sons. © 2018 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim. (b) Anisotropic swelling of a 3D printed CNC-PNIPAM hydrogel results in curling and bending of the structure. (c) Light responsiveness of a printed CNC composite with shape change after illumination. [101] John Wiley & Sons. © 2020 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim.
Download figure:
Standard image High-resolution imageAdvances in science and technology to meet challenges
For bottom-up approaches, great progress in controlling the directionality of cellulose building blocks and a feasible upscaling has been made by flow-assisted organization of CNFs into macroscale fibers [98]. Such fibers could be used for reinforcing elements of hydrogels to reach larger dimensions in soft robotics applications. Additionally, it needs further advances in 3D-printing techniques and ink properties fine tuning to better match requirements for extrusion and the printed product, in order to enable more sophisticated cellulose-based systems. Importantly, 3D-printers still have to become more versatile to process inks with a wide variety of composition. The major limitation that printed hydrogel actuators need to be kept in humid environments or freeze/supercritically dried to avoid shrinkage might be tackled with recent progress in solvent exchange processes or freeze-thawing-drying at ambient pressure. The latter allows for scalable fabrication of highly porous cellulose-based foams [99], but might be also applicable to drying of 3D printed inks, upon further adjustment.
The actuation of wood-based or wood-derived elements could be accelerated by chemical modifications to speed-up the water uptake or release. Additionally, geometric adaptations that reduce sample volume in actuating segments are possible. However, based on the abovementioned challenges, it remains rather unlikely that hydro-actuated wood elements, although being able to perform autonomous movements, become a dominating material in soft robotics applications.
Potentially, new opportunities arise from concepts that use delignified wood structures, in which the beneficial cellulose orientation is retained. The removal of lignin strongly reduces the transverse rigidity of cell walls, making thin wood sheets more flexible without losing elastic anisotropy [94, 95, 100]. Such cellulose composites allow for a higher cellulose volume fraction and relatively simple upscaling techniques compared to the disassembled counterparts.
Beyond actuation of entire elements, these cellulose structures may also function as hierarchical scaffolds of large porosity in which soft stimuli responsive hydrogels can be embedded for their actuation as switchable membranes in cellulose-based compartments [96].
Concluding remarks
Cellulose composites are likely to play a decisive role in material optimization for soft robotics applications in the future. Cellulose can act as a reinforcing phase for hydrogels and other matrices (as cellulose scaffold or as cellulose building blocks (NFC/CNC)), which allows adjusting, increasing and controlling the stiffness and elastic anisotropy of the composites. Further developments in bottom-up 3D-printing technologies will enhance this process, but certain challenges still have to be addressed. The use of cellulose scaffolds in a top-down approach may become an important alternative, but it needs more research activities in this field to identify its true potential.
In the future, aspects of materials selection and functionalization as well as materials decomposition after use phase need to become more relevant in order to implement a better composites recyclability and sustainability. Using cellulose, a renewable and CO2 storing resource, certainly provides benefits, but functionalization treatments and mixture with less sustainable materials can easily spoil the natural merit.
8. Shape-memory polymers and actuators for soft robotics
Andreas Lendlein
Institute of Active Polymers, Helmholtz-Zentrum Hereon, Teltow, Germany
Institute of Chemistry, University of Potsdam, Potsdam, Germany
Status
Shape-memory polymers (SMP) are active materials capable to perform shape-shifts on demand [102]. When exposed to heat, SMP can revert a mechanical deformation, which was temporarily stabilized by solidification of a switching phase. Such phase is formed by chain segments, which are linked to net-points determining the permanent shape of the material. The switching segments are flexible at high temperature and allow the deformation of the polymer as they can change from a random coil to an oriented, stretched conformation. Upon release of the external stress at this high temperature, the original, permanent shape is recovered driven by an entropy gain. If the SMP is cooled below the thermal transition Ttrans associated to the switching phase while keeping it deformed, the switching segments lose their conformational flexibility and fix in this way a temporary shape, which is obtained after releasing the external stress. This temporary shape stays unchanged until the temperature exceeds a switching temperature Tsw. It can be determined in thermomechanical tests and depends on the temperature Tdeform, at which the SMP was deformed before. Deformations between the temporary shape and the permanent shape can be quite high given the nature of elastic deformability of polymer networks. Elongations larger than 1000% have been successfully realized. This classical thermally induced shape-memory effect (SME) of polymers is a one-way effect. Once the permanent shape has been recovered the polymer needs to be programmed again.
This limitation was overcome by the discovery of shape-memory polymer actuators (SMPA), which are able to reversibly switch between two shapes controlled by temperature [103, 104]. The reversible movement of such materials is based on the crystallization induced elongation of actuation units consisting of chain segments oriented along the deformation direction and melting induced contraction by entropy-driven recoiling. While one-way SMP can serve as thermomechanical energy storage systems, SMPA can be applied as artificial muscles in soft robots.
Current and future challenges
The one-way SME of polymers can be applied in macroscopic robotic systems such as space vehicles. Self-unfolding sun sails or self-expanding porous tires are examples for features which have been successfully demonstrated using SMP as thermomechanical energy storage systems. The expansion of a folded or compressed device is also of interest for minimally invasive surgery, where a spacious implant needs to be implanted through a small incision [107]. Once the relevant position for the procedure has been reached, e.g. by use of a catheter, the implant should expand to its application relevant spacious shape driven by the release of the stored mechanical energy. A typical requirement in such type of applications is the capability of the materials to perform complex shape-changes. This challenge has been initially addressed by triple-shape polymers, which can perform two subsequent shape-changes while the temperature is increased. Meanwhile, several shape changes can be programmed in one material in terms of a multi-shape effect [108]. Even thermosensitive quadruple-shape hydrogels could be realized. Research in this area is going on and new records in the number of shape changes as well as technologies to change the sequence of shape-changes can be expected. The latter has been addressed exemplarily by a multi-material system, in which different ways to transfer heat in the material system led to variations, which part of the devices moved first [106]. These systems are in principle performing a sequence of several one-way SMEs, which are triggered at different temperature levels. In this way the stored mechanical energy can be release in portions.
SMPA are highly relevant for soft robotics as artificial muscles [109]. They have been explored as active material in robotic hands and grippers. Textiles for soft robotic skin applications are being developed and could be further advanced to act as an exoskeleton. SMPA are thermally-controlled and (re)programmable with regard to the geometry of the reversible shape change, such as stretching, bending or twisting. This (re)programmability is enabled by a second set of crystallizable domains, which are forming crystallites associated to melting temperatures (Tm), which are higher than the Tm range related to the actuating units. These crystalline domains form a scaffold structure within the SMPA, which spans the oriented actuating segments along the direction of the macroscopic movement. The incorporation of two different actuating units with distinct temperature ranges of their thermal transitions results in non-continuously moving actuators, which are a first step towards more complex shape-shifting geometries.
The application of SMP and SMPA materials in robotic systems [110] requires adequate processing/programming technologies including digital fabrication methods [111, 112] and suitable connectivity to controller systems, which could be electronic or optical systems.

Figure 9. (a) Thermally induced one way shape-memory effect of a polymer. [105] John Wiley & Sons. © 2005 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim. (b) Reprogrammable shape-memory polymer actuator. [103] John Wiley & Sons. © 2013 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim. (c) Adjustable sequence of two shape changes in a multimaterial system exhibiting a triple shape effect. [106] John Wiley & Sons. © 2013 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim.
Download figure:
Standard image High-resolution imageAdvances in science and technology to meet challenges
Recent progress in one-way SMP/temperature-memory fiber technology demonstrates the relevance as thermomechanical energy storage systems. Programming is the process to load the nanocomposite fibers containing graphene oxide nanosheets by twisting [113]. The stored energy is released when the twisted fiber is heated. Such thermosensitive twisted fibers could serve as microengines driving small softs robots.
Living machines, especially those working autonomously by harvesting energy from the environment and being controlled by stimuli provided by nature, are a relevant technology field for SMPA. An example illustrating this potential are external shading lamella for house facades, which close during intense sunlight period driven by heating and open in the evening automatically as temperature decreases. The challenge here is the scalability of the SMPA technology, which can be addressed by using commodity semi-crystalline (co)polymers or blends of these in combination with postprocessing crosslinking [104]. Longterm stability is essential for such applications and could be reached by integrating additional functions such as SH [114] or antioxidant capabilities of the SMPAs. SMPA technology could also be used to build a heat engine harvesting energy from cyclic day/night temperature changes. Formation of SMPA-based (nano)composites could also lead to magneto-sensitive or electrically conductive artificial muscles. Coupling the functions of indirect heating and thermally-controlled actuation would result in actuators, which could be controlled by alternating magnetic fields [115, 116] or by electrical current. Electrically-controlled artificial muscle fibers can be integrated in textiles and in that way form a platform for soft textile robots. In general, there is a need for faster actuation, lower energy consumption and control by alternative stimuli, especially low-intensity light would be of great interest. Finally, medical applications of soft robots are demanding multifunctional SMPA, which are cell-/tissue- compatible and potentially degradable. Recent advances in shape-memory sheet actuators involved the demonstration of programmable bioinstructivity directing stem cell differentiation into the osteogenic lineage [117]. Health technologies supporting elderly people by soft robots is another promising field.

Figure 10. (a) SMPA based shading lamellas (b) heat engine driven by a concertina-shaped SMPA drive element. (a), (b) Reproduced with permission from [104]. (c) Reversible noncontinuous twisting actuation. Reprinted with permission from [118]. © 2017, American Chemical Society. (d) SMP fibers for rotating microengines (figure on the right). From [113]. Reprinted with permission from AAAS.
Download figure:
Standard image High-resolution imageConcluding remarks
Artifical muscles and efficient energy storage systems are key components of soft robots. SMPA and SMP are therefore highly relevant active materials for the field as they can be produced based on commodity polymers, their processability by established methods such as extrusion or injection moulding has been demonstrated and they provide (re)programmability. Complex structures including multi material systems can be designed and fabricated by digital technologies, which allow fast prototyping and individualization. Future design principles for such robots might also be inspired by nature, especially by principles found in the plant kingdom [119]. Progress is expected towards multifunctionality as well as system compatibility for various controller technologies. SMPA are also attractive candidate materials with regard to sustainability as renewable starting materials are available and SMPA can be driven by temperature changes in the natural environment. Healthcare technologies, autonomous systems for agriculture or aerospace as well as living machines including adaptive buildings are promising application areas for SMPA based soft robots.
Acknowledgments
This work was financially supported by the Helmholtz Association through programme-oriented funding and received funding from the European Union's Horizon 2020 research and innovation program under Grant Agreement No. 824074 (GrowBot).
9. Modeling soft robots
Felix Vanneste, Olivier Goury and Christian Duriez
University of Lille, Inria, CNRS, Centrale Lille, UMR 9189 CRIStAL, F-59000 Lille, France
Status
In soft robotics, the behavior of the robot in deformation is inherently dependent on the type of material that is used. Consequently, we limit the focus of this perspective paper to modeling approaches that include constitutive laws of materials.
Solid body deformation laws from continuum mechanics include the material properties and are an excellent basis for accurate modeling of the soft robots. Numerical methods are routinely used in engineering to integrate these equations and model deformable structures. In civil engineering for example, the finite element method is used to assess structure strength and stability. But in these types of applications, there is no special concern of having interactive simulations, running at high frame rate. A first challenge in modeling soft robots was to make numerical methods compatible with real-time simulation which is necessary for control.
Several approaches were proposed to solve this performance problem, among which we can cite:
- Reduced parametrization: typically used for slender robots, this allows to describe the motion with few degrees of freedom along one space direction only. Examples include Cosserat or Kirchhoff models [123].
- Model Order Reduction: applied to finite element models, it allows to represent the degrees of freedom in a reduced yet accurate surrogate model, which allows for interactive simulations, and can be used for robots with any geometry [120].
- Static condensation: used on a coarse FE mesh to obtain the compliance coupling between actuators and effectors, it can lead to direct and inverse kinematic models [121, 124].
- Automatic derivation: in [125], the gradient of a sensing objective can be computed with respect to design variables, allowing for an automatic optimization of sensors placement. This is an alternative approach for inverting models, for design and control.
- Exploitation of high-performance computing to speed up the computation, using clusters or GPUs.
Soft robots are naturally more suited to interact with their environment. Consequently, an important aspect is to model these interactions and in particular contacts, in an interactive manner. This was done in real-time using an inverse model and a QP-solver in [121]. Numerical models of deformation can also be used for sensor data fusion [126]. For feedback control, these mechanical models can be used in closed-loop to adapt to sensors readings dynamically [127].
Current and future challenges
There is an obvious need to account for constitutive laws that are more complex than (hyper-)elasticity. Plasticity [130] or fatigue laws received little attention in the community but are key to predict the reliability of soft robots. An issue related to that is the problem of mixing different materials in the same robot to create specific behaviors. Then, regarding the inclusion of various kind of actuation, multiphysics model are needed to couple the mechanics of the robot with heat transfer for shape-memory alloy, electrical field [131] for electro-active polymers, chemical for ionic polymers, or pressure for pneumatic actuators. Regarding underwater robots, of flying robots, the mechanics must be coupled with fluid-flow simulations [132].
Then, for fitting these complex models to real-life, work remains to be done in the field of identification to find correct physical parameters in an efficient and accurate manner.
Dealing with complex contact situations must be addressed, since contacts play an important role especially in soft robots but can be a computational deadlock, when robots have complex geometries or induce self-collisions, and can lead to numerical instabilities. A first investigation was made in [133].
Regarding the use of these models to train AI algorithms or for design optimization remains an open question since these applications have their own challenges. When using the model to train a machine learning algorithm for control, it is still difficult to make sure the training is done on sufficient data when considering interactions with the environment: will the trained control be able to handle new contacts?
For design, many parameters are involved, such as shape, constitutive law, actuators positions, etc... Using a simulation of the robot is very useful. When optimizing with simulations, a reward function is defined and has often to be a compromise between several objectives that have to be weighted. Finding a generic method to define those reward functions is still an open question. Another difficulty occurs when considering parameter with respect to which it is hard to define the derivative of an objective function. These issues, challenges and opportunities of simulation for robotics were identified recently in [134].
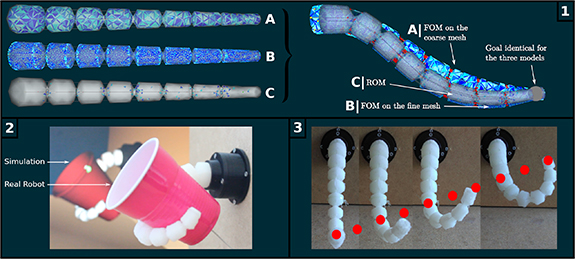
Figure 11. (1) Position comparison between a full order model (FOM) with fine and coarse mesh and a reduced order model (ROM) of a tentacle [120], (2) soft robot controlling the orientation of a plastic cup actuated online using the output of the simulation handling contacts in real-time [121], (3) dynamic control of a tentacle tip along a trajectory [122].
Download figure:
Standard image High-resolution image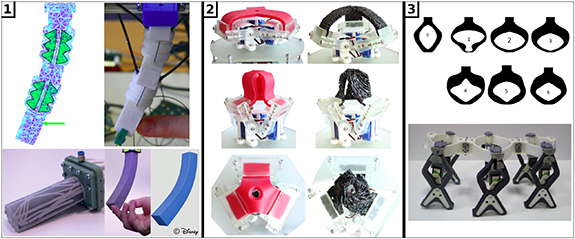
Figure 12. (1) Top: sensor fusion approach for force and shape estimation using FEM [126], bottom: sensor design for proprioceptive soft robots. Reproduced with permission from [125]. (2) simulation and use of mesostructured material to create anisotropic behavior [128] (3) use of an evolutionary optimization algorithm to do shape optimization [129].
Download figure:
Standard image High-resolution imageAdvances in science and technology to meet challenges
There is still a lot of progress to be made to further improve performance, especially for dynamic deformation models. For control, simulations must be fast, in fact, faster than real time for predictive control. The addition of multiphysics approaches [131, 132] in the numerical models mentioned above will be important when one wants to create complex designs but will also increase the amount of computations. The issue of reducing computation time and reducing model orders are therefore central [120, 133, 135].
Model-based and data-based approaches are not necessarily opposed. One could imagine scenarios where machine learning techniques are used to build a part of the predictive model, from data taken from the robot or its environment and from simulated data. This data-based model could also potentially be simulated in interaction with models based on physics equations. We can imagine methods for identification, calibration or even on-line re-calibration of models from the data. There are clearly important scientific advances to be made on merging the different approaches. It seems to us a pity to systematically oppose methods by a naïve dichotomy between 'model-based' and 'model-free'.
In order to meet the challenges mentioned above, it is necessary for the community to have a sustained commitment to software development and multidisciplinary training. Indeed, the numerical models mentioned above require skills and knowledge in numerical mechanics that are sometimes far from the basics of modeling in robotics. We believe that the development and validation of open source simulation platforms should be encouraged in order to advance the whole soft-robotics community on this subject. This is what we tried to develop with the SOFA framework and the plugins dedicated to soft robots. These simulation tools need to be easier to use and more accessible to most users and to allow rapid virtual prototyping.
Beyond pure simulation of robot behavior, more advanced geometric tools will be needed to parametrize the geometry of soft robots. Indeed, this point is essential to be able to optimize the shape of the soft robots. The multi-scale aspects, so present in nature from which soft-robotics draws its inspiration, will also be an obvious direction for the modeling aspects.
Concluding remarks
Numerical models based on continuum mechanics are quite generic, and account well for material properties. They are suitable for the design and control of soft robots. Computation time can be fast enough for robotic applications with real-time constraints. We believe that this is one of the paths to follow for the modeling of soft robots, in particular to accompany research towards more and more sophisticated designs based on multiphysics. Collision avoidance is outdated in the context of soft robots, the modeling approach will focus on collision permission and use.
The development of numerical models based on deformable body physics allows to take into account the specificity of soft robots. Integrating these models in an efficient and open toolbox should contribute to a broader convergence within the (rigid and soft) robotics community.
Acknowledgments
Projects of the research team DEFROST is financed by the French National Agency for Research (ANR), and by the European Union through the European Regional Development Fund (ERDF).
10. Realtime mechanical impedance control in soft robots for information gain and efficient control
Thrishantha Nanayakkara
Dyson School of Design Engineering, Imperial College London, United Kingdom
Status
There are two main phenomena where mechanical impedance control contributes to improve efficiency of realtime interactions with the world:
Realtime intrinsic conditioning to assist force/motion control
A bicycle rider would come off the seat and ride with bent knees on a bumpy terrain. The mechanical impedance conditioning at the knee helps to filter task irrelevant noise from the terrain. Similarly, in many other interaction tasks, biological counterparts condition the body while doing motion and force control. For instance, in a task of estimating the depth of a hard nodule in a soft tissue, participants show hand muscle co-contraction with statistical patterns unique to the depth of the nodule [136]. Independent robotic finger experiments show that this stiffness regulation helps to shape the likelihood function in a Bayesian tissue parameter estimation process [137]. Such stiffness conditioning works in the background while regulating palpation force and speed of fingers [138].
Exploitation of passive dynamics in a layered control architecture
Recent mountain goat inspired robotic hoof experiments show that specific levels of compliance across different joints in the hoof lead to a significant improvement in passive dynamic slip resistance [139]. Work done on Rodents [140] and Cephalopods [141] show hierarchical control, where local control loops use passive dynamics of the body to solve certain computational problems autonomously. Conditioning the body to exploit passive dynamics of the body plays an important role here. The reaching movements in the Octopus is one example [142] where it sets the stiffness of the tentacle to behave like a rope being unrolled along a straight line going through the prey.
Current and future challenges
Computational challenges
Most robotic systems require high sampling rates for stability. In contrast, biological systems tend to pay attention to states only at strategic points. For instance, during legged locomotion, we pay closer attention at the point of foot colliding the ground and not so much at how the leg swings forward. In the case of the Octopus unrolling the tentacle [142], it checks whether the prey is caught at the end, if the prey is not caught, it pulls back and throws again. In addition, robotic systems still struggle to perform high bandwidth stiffness conditioning while performing force/velocity control tasks.
Control architecture challenges
As mentioned in the previous section, the efficiency of physical interactions involving perception and action depends on the interplay between concurrent extrinsic force/movement control and intrinsic mechanical impedance parameter conditioning processes. I call the orchestration of these concurrent motor control processes to be 'behavioral lensing' because it leads to an improved perception of task relevant states with higher task stability. Current robotic systems face the challenge of such concurrent control due a lack of understanding of how one helps the other.
Hardware challenges
All current robotic stiffness control mechanisms find it hard to match the speed and range of stiffness achievable through muscle co-contraction in biological counterparts. In addition, force/weight ratio is a major challenge for robotic actuators to come close to biological muscles. Coupled sensing and actuation is another challenge that biological muscle spindles and tendons accomplish elegantly.
Advances in science and technology to meet challenges
Realtime computing in the physical body
The cochlea in the auditory system is a good example for a physical computer that solves the realtime frequency components separation problem for audition [143]. We have found that the knee joint also solves a similar problem of entropy reduction of contact forces during walking [144]. Progress in this area will help to replace computer algorithms with more robust multi-purpose physical systems in the robot's body.
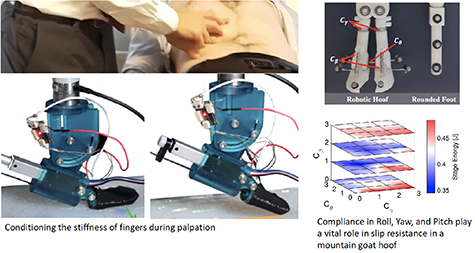
Download figure:
Standard image High-resolution imageEntropy reduction through physical conditioning
The theory of contracting regions in nonlinear dynamics of physical systems [145] to reduce the entropy of the world needs more attention. In the case of the bicycle rider, the bent knee provides such a contracting region in the state space that reduces the uncertainty of the world. Advances in this area together with high bandwidth physical actuators will make a significant difference.
Dimensionality reduction in the state space through physical conditioning
In the case of an Octopus, throwing the tentacle to catch prey uses passive dynamics in a hyper redundant system that unrolls along a straight line to minimize hydraulic resistance [140]. If the prey is caught, it would make two rigid links with a joint at the middle to bring the prey to the mouth. Both throwing and fetching strategies reduce a multi-dimensional control problem to reduced state space control problem.
Advances in hardware
It is very important to make advances in high bandwidth high force/weight ratio actuators and soft sensors that can be conditioned to change their bandwidth to suit the perception task. Deeper understanding of how muscle fibers contract given low voltage signals and how sensors such as spindles and tendons function in conjunction with actuation will provide a good basis for such bio-inspired sensors and actuators.
Self-guided physical adaptations
Still robot hardware iterations have to be done by human designers. Future advances to use a statistical history of control action for realtime intrinsic conditioning of the physical body to self-discover permanent physical adaptations will make ground-breaking advances in design iterations of robots especially for private environments such as households, hotels, and offices that limit direct feedback to designers.
Concluding remarks
Conditioning the mechanical impedance parameters of the physical body serves multiple purposes such as improving the stability of dynamic interactions, quality of perception, realtime computation to meet deadlines imposed by an interaction task, dimensionality reduction in state space control, and efficiency of a task. Biological counterparts accomplish these through neural and physical mechanisms. Phenomena such as stiffness control of fingers during palpation or by a tuned physical mechanism such as the goat hoof for slip resistance are examples for physical computing solutions in addition to the direct computational contributions from the brain. Since conditioning the physical bod too takes some time to accomplish, I argue that long term adaptations may try to make either realtime conditioning easier or not frequently required. From a realtime conditioning point of view, robots can benefit from high bandwidth and high force/weight ratio actuators. Moreover, future control architectures that would efficiently arbitrate the concurrent processes of intrinsic conditioning and extrinsic movement and force control will make useful advances in physical robots interacting with the natural world. Future ability of physical robots to discover their own physical improvements to make it easier to condition their bodies to suit task requirements or not to need frequent conditioning at all will revolutionize approaches to design iterations of physical robots.
Acknowledgments
This work was supported in part by the UK Engineering and Physical Sciences Research Council (EPSRC) MOTION Grants EP/N03211X/2 and EP/N03208X/1, and EPSRC RoboPatient Grant EP/T00603X/1.
11. Self healing soft robots
Bram Vanderborght, Joost Brancart and Seppe Terryn
Vrije Universiteit Brussel and imec, Brussels, Belgium
Status
Natural organisms have extraordinary complex bodies in which the combination of soft, compliant, stiff, and even sometimes brittle materials incorporates an embodied intelligence that allows to move with the highest efficiencies [146]. Their bodies are not over-dimensioned for the daily tasks they fulfil, but in unexpected, threatening situations they can get injured. They are prone to cuts, tears, ruptures and fractures from external sources or from overloading. Luckily, natural organisms have the remarkable, unique property to feel pain and heal damage when accidents and injuries occur. The remarkable healing process starts up autonomously and after the necessary healing time, depending on the magnitude of the damage, the functional properties are completely recovered. Consequently, this powerful biological healing ability allowed organism bodies to evolve towards highly efficient designs.
Although highly inspired by organisms, soft robots in general do not have healing capacities. Their compliant bodies allow safe human-robot interactions and make them resilient to impacts and collisions. But their lifetime is limited due to damage caused by sharp objects or overloading, which both often occur in unstructured, dynamic environments in which these robots will be used [147]. Traditionally, this problem is addressed by over-dimensioning the system, making it able to withstand harmful situations, but this approach compromised the flexibility, the safety, as well as the efficiency of the design. Organisms and their highly efficient, healable bodies have inspired scientists in the last five years to impart synthetic healing functions in soft robots [148]. They do so through manufacturing them from 'SH polymers', giving them the capacity to heal from microscopic and macroscopic damage. Since the pioneering works of White et al [149], a broad range of SH polymers has been developed, based on a variety of chemical and physical principles [150]. This has led to innovative applications, of which SH soft robotics are one of the most recent and promising. Although this novel approach is still highly novel and challenges remain unaddressed, it has to potential to increase the lifetime of future soft robots and the recyclability, reducing maintenance and ecological footprint, while permitting to optimize the design. Through the adoption of SH polymers in robotics, this SH technology can find its way to other industries like automation, automotive and machines.
Current and future challenges
The integration of a healing capacity is only a reliable and sustainable solution to the vulnerability of soft robots if the healing of a damage is performed fully autonomously, without external or human interventions, which are in general cost inefficient. Autonomous healable SH polymers, able to heal macroscopic damage without the need of a stimulus other than the formation of damage, have been introduced recently in soft robotics [151] as well as non-autonomous SH polymers that require a stimulus, e.g. heat or light irradiation, to perform healing [148]. There is a general trade-off between mechanical strength/stability of the polymer network and the intensity of the healing stimulus or the healing duration [147]. This is translated into soft robotic prototypes that can heal autonomously but have a limited force and power output due to their hyperflexible bodies [151] and others that have a higher mechanical performance but require external thermal or UV irradiation in order to heal [148]. In the near future, this problem can be addressed using new generation SH polymers, in which simultaneously enhancing the mechanical and healing properties are enhanced. On a system level, the incorporation of a stimulus providing system, integrated heaters or UV-emitters, allow to use non-autonomous SH networks with high mechanical strength and stability in a soft robot system that recover autonomously.
To react autonomously to partially or complete failure, a damage sensing capability must be included in future SH soft robotic system. When damage occurs, the embedded damage sensing network can provide the trigger to activate the healing procedure, prompting the whole system to rest and heal before (more) serious damage occurs, restoring not only structural integrity by reattaching broken parts, but also restoring complex functions like actuation and sensing. Embedded sensors for damage detection or force measurement or state estimation as well as integrated heaters cannot compromise the flexibility of the soft robotic system. New advances in soft sensors and flexible heaters facilitate this but they are also prone to damage and consequently, these systems need a healing capacity as well. Hence the need for development of SH materials with additional functionalities, such as conductivity for flexible sensor or flexible ohmic heater applications. Finally, dedicated processing techniques for SH polymers and composites need to be developed to manufacture the complex SH soft robotic systems.

Figure 13. Advantages and disadvantages of soft robots, that can be addressed by introducing an autonomous damage sensing and healing capability in the system. This can lead to further optimization of the system on an energy efficiency, economical and ecological level.
Download figure:
Standard image High-resolution imageAdvances in science and technology to meet challenges
The requirements for SH materials, imposed by new applications in soft robotic, were summarized in a review paper by Terryn et al [147] and pushed the development of new generation SH materials that combine fast healing and high mechanical strength through smart polymer network design, new reversible chemistries or though combining multiple SH mechanisms in a single network. An impressive new material is presented by Pena-Francesch et al [152], that is able to heal large damages in seconds at 50 °C and has a mechanical strength of 20 MPa.
In the fast growing field of soft sensors, recently the first healable soft sensors [153] have been reported that are composed out of SH polymers having additional electrical properties that are inherent to their chemistry or through the addition of electrically conductive fillers to obtain piezo resistivity. Integrated in a soft robot, these SH soft sensors can be employed to measure strain, deformation, pressure, and ultimately for structural health monitoring of the robotic part. Advances in healable flexible heaters [154] allow to incorporate the stimulus providing system directly in the material without loosing the flexibility. As the soft body in which they are integrated, these flexible sensors and heaters will be able to heal from macroscopic damages. In addition, compounding with magnetic or photothermal fillers allow remote-controlled and local activation of SH processes [155], providing new methods to provide the stimulus in future soft robots.
Using multiple materials in a single design can improve the performance of soft robots and can allow new complex deformation modes and embodied intelligence. However, the multi-material interfaces are mostly weak, as they rely mainly physical interactions and consequently fail at a limited number of actuation cycles. By judicious design of the polymer network structure, the mechanical properties of SH polymers can be tuned over a broad range [148]. The reversibility of the network formation permits chemical bonding across the contact surface of materials with different properties allowing to achieve excellent interfacial bonding, increasing the robustness of multi-material soft robots [156]. Recently, additive manufacturing of SH polymers [157] as well as novel processing techniques that explore the reversible nature of the network [148] offer great design freedom in the manufacturing of the future complex SH soft robots.

Figure 14. In order to achieve autonomous healing in soft robotics, challenges in multiple subfields must be addressed, including developing self-healing sensors for smart motion control and damage detection and self-healing electronics for stimulus and healing control. All fields rely on and push further development in self-healing polymers.
Download figure:
Standard image High-resolution imageConcluding remarks
Although the integration of healing mechanisms in soft robots is still quite novel, some impressive SH soft robotic prototypes have been presented in academics in the last five years. These advances on the application level, reveal limitation of SH polymers and push the material development towards increasing mechanical and healing performance and including additional functionalities. To achieve the final goal of a soft robot that detects and heals macroscopic damage autonomously, multiple technologies like SH polymers, SH sensors, smart motion controllers, health monitors and integrated stimulus providing devices, must be combined in an intelligent system. The authors believe that the fast advances in the subfields, show that this ambitious objective will be achieved in the coming five years. It is however important to involve material scientists at every stage, such that they get clear insights in the requirements and needed improvements for the materials. A synergetic relation between all fields will result in mutual benefits.
Acknowledgments
This research is funded by the FWO-grants of Terryn (1272621N), Brancart (12W4719N) and by the EU FET Project SHERO (828818) and EU project SMART (860108).
12. Power sources for soft robots
Steven I Rich1, Ruiyuan Liu3, Kenjiro Fukuda1,2 and Takao Someya1,2,3
1Thin-Film Device Laboratory, RIKEN, 2-1 Hirosawa, Wako, Saitama 351-0198, Japan
2Center for Emergent Matter Science, RIKEN, 2-1 Hirosawa, Wako, Saitama 351-0198, Japan
3Electrical and Electronic Engineering and Information Systems, The University of Tokyo, 7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
Status
As the abilities of soft robots to sense and manipulate their environment continue to improve, the question of how to power these systems becomes ever more critical to their practical implementation. While many lab-based devices use tethered systems to provide electricity or pressurized fluid to control these robots, one final step to achieving wearable and autonomous soft devices is 'cutting the cord'—endowing these machines with their own on-board power systems to enable them to leave the nurturing womb of the laboratory, and find their place as untethered search-and-rescue robots, assistive devices, and drug-delivery systems.
Because of the performance limitations and power constraints associated with soft actuators, however, design of soft robotic power systems presents different challenges than those associated with conventional systems. Power sources for soft robots must balance the standard metrics of power output and lifetime with the soft robotic considerations of flexibility and light weight, while considering other important factors like robustness, safety, and cost, which may come at the expense of performance. Combined with the high-power demands of many popular soft actuation systems, these trade-offs have made implementing on-board power particularly challenging for soft robotic applications.
Accordingly, many groups have turned to consumer-available state-of-the-art rigid energy storage devices, particularly those with high energy densities and small volumes like lithium-ion batteries for electrically powered actuators [158] or compressed gas cylinders for pneumatic ones [159]. For components that require less energy, such as sensors, lightweight and flexible power solutions (including both storage and power generation components) have also been widely implemented. Thin film photovoltaics [160], triboelectric nanogenerators (TENGs) [161], and wireless near-field power transmission [162] have been used to directly power sensors. Since most soft sensors still require continuous power input in the working state, using self-powered sensors, such as photodetectors for light [163] and nanogenerators for strain and pressure [164], can help relieve some demands on the primary battery or power supply. As power systems continue to improve, we can expect to see untethered soft robots with smaller sizes, lighter bodies, longer ranges, and greater functionality for many exciting applications.
Current and future challenges
Before we can achieve such soft robots, however, there remain several important challenges within these power systems that must be addressed. While improvements in traditional battery technologies have brought improved lifetime and performance to many soft robots, their high rigidity and weight introduces other challenges, pushing soft roboticists to look toward alternative, cutting-edge flexible power solutions. Compliant batteries or battery arrays can be achieved by decoupling the energy storage and compliant components or by organizing energy storage units into deterministic structures (i.e. structures rendered stretchable by their geometric configuration). Similarly, supercapacitors, which have also recently achieved high compliance and durability through the use of ultrathin materials and deterministic structures, can improve the speed of current delivery, especially useful for fast-response actuators and thin-film based soft electronics at low driving voltage. These systems, however, face a natural trade-off between energy density and compliance, as structures capable of relieving strain often have a larger volume (e.g. spirals or serpentine structures). This imposes limits on the capacity of such energy storage components, which can restrict the range or lifetime of soft robots.
To alleviate these restrictions, energy harvesting systems (systems that gather energy from their surroundings—such as flexible photovoltaics, TENGs, and thermoelectric generators) can supplement energy storage components, helping to circumvent the need to charge or replace on-board batteries.
However, these advanced power systems present two new challenges: attaining sufficient power density and sufficient compliance. The reduced energy density of compliant systems exacerbates the challenge of matching the energy required by a given actuator or sensor with the energy available from the power systems, often requiring auxiliary components like power management circuits or regulators (figure 15). Coupled with the vast range in compliance for these power sources, and additional requirements like size, discharge speed, and energy density, these constraints can render the selection of a power source quite challenging. Fortunately, the scaling laws of these systems, in particular the dependence of their power output on volume (e.g. batteries) or area (e.g. solar cells), can be exploited to capitalize on the strengths of specific power sources.

Figure 15. A comparison of the power requirements of various soft robotic technologies (represented by the shaded circles) and the power output capabilities of various soft robotic power sources (represented by dotted lines). Although there are many additional considerations when selecting a power source, this plot may serve as a general roadmap to match sensors and actuators to their appropriate power sources. Abbreviations: PVs—photovoltaics, TENGs—tribooelectric nanogenerators, TEGs—thermoelectric generators, SMAs—shape memory alloys, IPMCs—ionic polymer-metal composites, DEAs—dielectric elastomer actuators.
Download figure:
Standard image High-resolution imageAdvances in science and technology to meet challenges
As power demands for soft robots push existing power sources to their extremes, further progress will require improvements in performance and system integration. The needs of soft robotic systems (some of which are shown in figure 15), therefore, should serve as a road map to the development of advanced soft robotic energy sources. A fuller understanding of the mechanisms at work in these devices, as well as concomitant advances in stretchable conductors and active materials (e.g. conjugated polymers) can help researchers to develop soft power sources with greater performance. In addition to material architecture, creative structural design can adapt existing high-performance power sources into compliant shapes (e.g. creating stretchable, buckling power sources by mounting ultrathin photovoltaics on prestretched substrates), creating new power storage or energy harvesting devices suitable for advanced soft robots. Furthermore, combining many different power elements (e.g. energy harvesting and energy storage devices) within a single robot may help to capitalize on each source's advantages while minimizing its weaknesses. In particular, energy storage devices may be needed to smooth over large variations in energy harvester output or create the large spikes in power needed for actuation (figure 16).
A parallel strategy to facilitate the development of soft robots is to reduce the relative energy demands on these power systems. This may mean simply advances in actuator technology in terms of efficiency, strength, or work density, or even, as in the case of biohybrid robots (e.g. cyborg cockroaches), off-loading specific robotic functions to the metabolisms of certain animals [165]. Alternatively, scaling up or down these robots can improve performance by taking advantage of differences between the energy demands and relative strengths of different actuators and the energy densities of various power sources [166]. Using non-electrical power sources like chemical reactions, may help to power pneumatic robots as well [167].
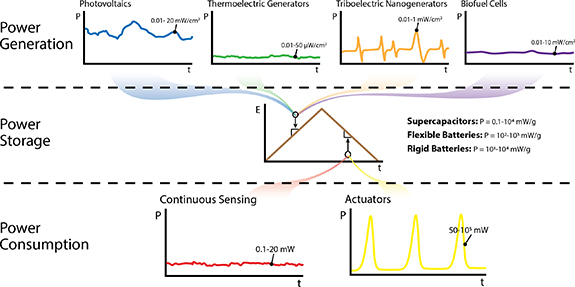
Figure 16. Representation of different profiles for power generation, storage and consumption. This figure demonstrates how power storage components can be used to create uniform power output (e.g. for continuous sensing applications) from energy harvesters with variable power generation, or create a high peak-power output (e.g. for actuation applications) from energy harvesters with low, continuous power generation.
Download figure:
Standard image High-resolution imageSince the success of untethered soft robots remains inextricably linked to their power sources, continued work on these challenges is critical to the development of the entire field. Recent results increasing compliance and power density have shown great promise, and simultaneous improvements in actuators and sensors will yield many exciting new robots. As these systems begin to enter the marketplace, other considerations, such as mass-producibility, reusability, durability, and environmental friendliness will become more and more important. With these efforts, we may soon face a world where soft systems form an integral part of our everyday life.
Acknowledgments
The work shown in this section was partially supported by JSPS KAKENHI Grant Numbers JP18H05465 and JP18H05469.
13. Plantoids and self-growing soft robots
Barbara Mazzolai
Alessio Mondini, Emanuela Del Dottore, Laura Margheri, Istituto Italiano di Tecnologia, Italy
Status
In the last few years, plants have raised the attention as a new model for the field of bioinspired and soft robotics [73, 168–171]. Plants are an interesting model for their high plasticity that allows them to adapt, survive under stress, and respond to changing conditions while growing [172]. In terms of technology design, most relevant features of plants include their capability of indeterminate growing (both above and below soil), movements without muscles, structural materials endowed with morphological adaptation and variable stiffness, distributed sensory system and control architecture, anchoring and attachments strategies, intra-system and inter-system communication, and energy saving mechanisms [173].
The roots of plants have been investigated for first by researchers as model for developing autonomous robots able to explore soil [174]. Delegated to the foraging and anchoring of plants, roots are able to move in soil by growing and adapting to the environment, avoiding obstacles, and following nutrients and water gradients using integrated sensor units. Based on these natural features, artificial roots have been designed by implementing a growing mechanism (i.e. a miniaturized 3D printer machine) that adds new material to the base of the tip to push it forward into the soil, while creating layer-by-layer the structure of the robotic root's body [73]. Such systems have opened to the field of 'plantoids' and of 'growing robots', a category of robots that are able to self-create their own body and imitate biological growth by incrementally increasing the mass of the robot [175] (figure 17).
The field of plant-inspired robotics is new but rapidly expanding, with several examples of technological innovations including osmosis-based actuators for coiling/uncoiling in tendril-like robots [63], actuators inspired by the carnivorous plants [62, 176], vine-like robots [169, 170], plant-hybrid energy generators [177], climbing plant hooks-inspired attachment systems [178] sensors [179] and swarm communication strategies [180].
Current and future challenges
Plants use a number of singular strategies to interact with the environment, including complex movements, sensing, growing and exchange of information with other plants and organisms, that deserve to be further investigated for innovations in multi-functional materials and for augmenting robot abilities, including their adaptability, robustness, long-term reliability, predictive modeling, sharing of resources and co-development of body and behavior. Such features are of peculiar interest for the design of machines that can act in- and adapt to- unstructured, extreme, and dynamically changing environments.
Focused investigations of plants, which are needed to extract the natural key features useful for the design of the artificial counterpart, are a major challenge for current and future researches in the field of plant-inspired technologies [173]. There are already studies on the growing mechanisms of shoots and roots, on the dynamic and control of tendrils' searching and coiling, on the abilities of anchoring of climbing plants [181], on the mechanisms of seeds movement and dispersion [182], or on the mechanisms of plants communication [183], with relevant results for both scientific and technological perspective.
We need to rethink the new generation of technologies in a more environmentally-friendly and sustainable way, with materials that are multi-functional in terms of actuation, sensing and energy use, and that are able to evolve or grow depending on the environmental conditions and needed task. This is a major challenge for reaching a reduced environmental footprint of ICT and no new e-waste. In fact, artificial systems are still limited on their performance in real environment, in terms of long-term reliability, autonomy, energy use. In this perspective, plants offer a plethora of inspirational insights to reverse the point of view of robotic design in a more naturally-integrated way.
To close the circle of biorobotics, plant-inspired robots can be also very interestingly used to better understand how real plants work. A bioinspired approach, when based on a correct extraction and verification of biological principles, also serves the purpose of providing further tools for studying biology, which is fundamental to get closer to a full knowledge of the natural systems and to safeguard them.
Advances in science and technology to meet challenges
Nature has carefully tuned bio-materials to enable adaptation in the morphologies and behaviors of all living organisms, conferring to the interactions between body and environment a central role in the computation of the system's actions [174].
Observing and extracting features of such motions and structures require time-lapse recording and tools for image analysis at micro-level; advances in biomechanical analysis, integrating measurements of mechanical interactions, dynamic modeling and 3D reconstruction taking into account the biological system within its natural environment; and a successive artificial reproduction with advanced micro-fabrication techniques [184].

Figure 17. On the left, the plantoid robot, first robot inspired by plants with sensorized roots; on the right, a robotic root that moves by growing across rocks in unstructured terrains.
Download figure:
Standard image High-resolution imageAs examples, 3D direct laser lithography has been a revolutionizing technology for replicating micro-scaled structures present in nature, enabling anchoring of artificial devices over a wide range of different surfaces [178], or the reproduction of hydrophobic surfaces helping to demonstrate the role of micro hairs in Salvinia molesta leaves [185]. Electrospinning is another promising technology for developing novel biocompatible, biodegradable functional materials [186], used for example, to functionalize artificial Dionaea-like bistable structures with hygroscopic electrospun nanofibers for activating the state change with a response time of ≈1 s [187].
Extrusion-based fabrication techniques explored already for biomedical applications with large success [188], provide other alternatives for the development of next generation biocompatible robots. 3D bio-plotters have been used for the realization of shape morphing botanical-like structures [189]; and fused deposition modeling has been customized and embedded into the first plant-inspired growing robot [73] to mimic the growing mechanism used by plants roots and shoots for movement and exploration.
Taking advantage of these advanced techniques, represents a step forward for pushing the boundaries of fabrication and functionalization of components and systems based on multi-functional bio-materials.
Concluding remarks
The perspective of robotics design need to be revised in a more sustainable way, starting from Nature with a deep understanding of natural ecosystems. We need to envision robots as environmentally responsible machines that can grow, adapt, and are built with biodegradable or recyclable materials [14, 15].
Plants offer a plethora of inspirational insights to reverse the perspective of design of robotic solutions in this more naturally integrated way. Looking at plants, a new wave of 'green robots' can be developed to better integrate into the natural ecosystem, varying their structural, physiological or behavioral features, as environmentally-friendly artificial systems.
Cross-disciplinary effort and cross-fertilization between science and engineering, are the keys to reach this goal, increase the effectiveness of technological applications but also the frequency of scientific discoveries, using advanced technologies and bioinspired robots for validating scientific hypothesis and for a better understanding of species biology and ecology.
Acknowledgments
This work has received funding from the European Union's Horizon 2020 Research and Innovation Programme Grant Agreement No. 824074 ('GrowBot'), the European Union's Horizon 2020 Research and Innovation Programme Grant Agreement No. 101017940 ('I-Seed'), and the European Research Council (ERC) under the European Union's Horizon 2020 Research and Innovation Programme Grant Agreement No. 101003304 ('I-Wood').
14. Underwater soft robots
Marcello Calisti1,2 and Cecilia Laschi3
1The BioRobotics Institute, Scuola Superiore Sant'Anna, Italy
2Lincoln Institute for Agri-food Technology, University of Lincoln, Lincoln, UK
3Department of Mechanical Engineering, National University of Singapore, Singapore
Status
Marine robotics allowed otherwise impossible underwater operations, dramatically increasing our ability to understand the oceans from a scientific perspective, but also to exploit them commercially. Most underwater robots are pelagic—that is, they move in the water column by mean of thrusters—and, for this reason, they present intrinsic limitations when it comes to interacting with the seabed.
Operating in the so-called benthic realm, i.e. very close or in direct contact with the seabed, carries high risks, especially in coastal areas where the currents and waves disturbances are higher, to accidentally bump against the seabed and damage the robots or the environment. Moreover, the use of propellers introduces high levels of acoustic noise in the environment and generates perturbations which raise debris causing disturbance in the ecosystems and deteriorating the quality of images and sensor readings.
Bioinspiration to benthic marine species in robotics suggests soft bodies, compliant joints and a variety of locomotion strategies, such as crawling, borrowing, and legged gaits [190], as alternative approaches to incremental research. In this extremely young field, attempts to morph the soft body to increase walking performance have been demonstrated in lab settings [191]. In underwater real missions, SILVER2 [192, 193], a medium-size hexapod robot, demonstrated to harness its light underwater weight and elastic elements integrated in its legs to perform a bioinspired self-stabilizing locomotion to reject the disturbances induced by irregular terrain, without the need to carefully plan foot placement.
This kind of benthic underwater soft robots can pioneer a new breed of underwater vehicles which will move over underwater structures, fragile substrates, inside caves or wreckages, and that will collect samples without disturbing the environment, will perform long-time monitoring, precise and high definition photography and muscular works when needed. Advances in this field provide tools for biology, geology, oceanography, offshore industry, and underwater operations in general.
Current and future challenges
Benthic locomotion poses additional challenges with respect to legged locomotion in terrestrial environments, already successfully implemented in robotics. Underwater legged locomotion is affected by buoyancy, water drag, added mass, and thus requires locomotion strategies that account for those, as observed in benthic marine species. Insights and models of benthic locomotion are major challenges on the theoretical side.
Benthic robotics poses challenges on the materials used for the robot body and components. In order to implement efficient models for underwater locomotion, soft materials and compliant joints need to be used. The interaction with the seafloor at the base of benthic locomotion gives contrasting requirements: compliant body and components are helpful to comply with interaction, collisions, physical constraints; at the same time, strength is required to apply forces to propel the body forward.
Moreover, materials and structures need to ensure water-insulation to possible electronic components and to resist pressure. Lastly, robots operating in the benthic environment must ensure not to contaminate it, both in terms of disturbances (noise, sediment perturbation, etc) and in terms of possible dispersion of pollutants. Ecocompatible and even biodegradable materials could be employed to this purpose.
In terrestrial environments, robots can accurately detect their environment through a number of sensors and plan their behavior accordingly. Underwater, such detailed mapping is not possible, due to the lack of accuracy in the sensors, to communication bandwidth limitations given by the water medium, to disturbances in the sensory input, like particle dispersion which limits the use of optical systems. Robot autonomy stands as a major challenge in underwater robotics, both from the energy and from the control viewpoint. Most underwater robots are tethered and directly controlled by pilots during operations, and this same approach could be adopted in benthic robots. However, investigating energy-efficient locomotion, using energy harvesting and exploring new forms of energy transformation are high-potential challenges in this field. Similarly, providing benthic robots with autonomous behavior represents a value for effective seabed explorations and resident operations (such as continuous monitoring and maintenance of underwater plants).

Figure 18. The concept of benthic underwater soft robots.
Download figure:
Standard image High-resolution image
Figure 19. SILVER2 robot.
Download figure:
Standard image High-resolution imageAdvances in science and technology to meet challenges
Biomechanical and behavioral studies of marine species provide insights into locomotion strategies underwater. The principles extracted from observations and measurements need to be transformed into mathematical models, usable in engineering, for designing novel benthic robots. At the same time such benthic robots enable the study of the starting biological models, closing a beneficial loop.
Advances in material science would enable a leap in the field on benthic robots: soft materials that adapt to environmental niches, smart materials that store energy, materials that biodegrade and SH materials could answer many of the challenges of effective operation, survival, energy autonomy.
Recent views of intelligence give the physical body a more important role in shaping behavior [194]. Effective sensory-motor behavior is given by the physical interaction of the body with the environment more than we think. It then depends on mechanical properties and morphological arrangements, while control is simplified to a limited number of control signals or sensory feedbacks. Locomotion is a clear example, showing how self-stabilizing gaits are given by proper morphologies and compliance, in the extreme extent with simple, open-loop, controllers. This approach is pivotal underwater, given the limitations in perception. Investigations on such embodied intelligence and formalization of principles into theories and mathematical models would enable a disruptive progress in benthic robotics.
Concluding remarks
Soft materials are an important direction of progress for robotics [14]. Soft robotics technologies contribute to a sustainable progress [15] and enable further abilities [195] in underwater robots. Inspired by benthic marine species, soft robots can negotiate the interaction with the seabed and other underwater structures. Based on embodied intelligence principles, they gain unprecedent locomotion ability, with self-stabilizing gaits, efficient computationally and energetically.
Such abilities enable a plethora of applications, underwater. Benthic soft robots can explore the seabed, which is of great interest for studies in biology, ecology, oceanography, and for other scientific purposes. It is of interest for monitoring and management of environmental resources and meteorological services. Benthic robot abilities also find application in industry, for monitoring and maintenance of underwater plants.
Progresses of the young field of benthic robotics would complement underwater explorations and monitoring with measurements and operations that have a high social, scientific and industrial impact, and that are not possible today.
Acknowledgments
This research was partially funded by Arbi Dario S.p.A. under the framework of Blue Resolution project, by National Geographic Society under the framework of GOLD (Guardian of the Oceans Legged Drone) project, Grant No. NGS-56544T-19, and by Research England [Lincoln Agri-Robotics] as part of the Expanding Excellence in England (E3) Programme.
15. Multifunctionality, adaptability and growth without borders
Wenguang Sun1,2, Gang Wang1,2 and Li Wen1
1School of Mechanical Engineering and Automation, Beihang University, Beijing 100191, People's Republic of China
2These authors contribute equally to this manuscript.
Status
Fish have various locomotion capabilities and body morphology that enable them to survive and perform complex tasks in harsh aquatic environments. Underwater robots' design can be inspired by the kinematics, physiology, and anatomy of fish for enhanced maneuverability, stealth, and energy efficiency. In the past decades, robotics researchers have developed several notable fish-inspired robots. According to fish swimming modes, fishes can be divided into body and/or caudal fin propulsion (BCF) and media and/or paired fin propulsion swimmers. In BCF locomotion, body undulation waves are generated, which undulates towards the caudal fin, thereby producing propulsion. Undulatory biorobotic underwater robots were commonly used to optimize underwater vehicle performance or investigate scientific questions of fish biomechanics.
Fins are the most distinctive anatomical features of fishes, and are essential components for maneuvering, stability, sensory feedback. They are composed of several rigid bony spines or rays protruding from the body with soft skin covering them and joining them together. Compared with the undulatory flexible body of fishes, fins are less understood. In general, fish fins can be divided into median fins and paired fins, which are supported by a series of segmentally arranged bony or cartilaginous elements, and a wide range of muscles control the movement of the fin.
Undulatory biorobotic models commonly consisted of multiple rigid segments with static fins, which can swim underwater by rotating each body joint [199–202]. These robots are primarily applied to understand the effects of morphology and swimming kinematics. Most undulatory biorobotic fish typically operate at low frequencies (<2 hertz) without exploring high frequency as those of biological fish such as tunas. To explore the high-frequency fish swimming performance space, Zhu et al designed a tuna robot operating at a high frequency up to 15 Hz, exceeding yellowfin tuna (Thunnus albacares) which reach a maximum of 10 Hz tail beat frequency. Some of the representitive undulatory biorobotic models has shown in figure 20 during feeding bouts [196].
With the rapid growing of soft robotic technology, robotic fish with soft materials for the body has been designed in recent years. Driven by an integrated micro hydraulic system, soft robotic fish can exhibit a lifelike undulating tail motion that can facilitate a more natural integration in the ocean [197]. Modeled after redox flow batteries, a soft robotic fish that combines hydraulic force transmission, actuation, and energy storage creates a circulatory system developed. The energy density of the robot enables operation for extended durations (up to 36 h) [203].
In most previous studies, the fins (tail fin, pectoral fin, dorsal, anal fin) of robotic fish were composed of simple sheet-like structures that were static and unable to actively perform shape changes. Morphing fins play an important role in fish swimming. For example, the robotic fish can realize the forward swimming with the undulatory fin even if the fish body remains static [204, 205]. Inspired by bluegill sunfish, Gottlieb et al developed a pectoral fin that can produce the force and flow to drive the maneuver by achieving complex three-dimensional motion [206, 207]. One unique example, Hou et al developed an aquatic-aerial multimodal vehicle with soft morphable fins, which endows a robot to freely shuttle transits between water and air [208].
From the biomimetic perspective, when characterizing the function of a bioinspired robotic fish, both the movements of fins (caudal fin, pectoral fin, and dorsal/anal fin) and body deformation should be included. Based on multimaterial three-dimensional printing, Wen et al fabricated the first undulatory biomimetic robotic fish with morphing median fins (including a spiny-rayed dorsal fin, soft-rayed dorsal/anal fins, and a caudal fin) whose stiffnesses span three orders of magnitude. An array of fluidic elastomeric soft actuators was used to mimic the dorsal/anal inclinator and erector/depressor muscles of fish, which allowed the soft fins to be erected or folded [198, 209]. The morphing fin can significantly increase the linear acceleration rate by up to 32.5% while decreasing the side force by 24.8%.
The fins of fishes have also evolved other functions rather than swimming and maneuvering. For example, mudskippers apply their pectoral fins to walk, roll, jump on mud [210]. Remora suckerfish's first dorsal fin has been modified to a suction disc to hitchhike on marine animals [211]. Clingfish's pelvic fins can form and release the suction disc, functioning as a 'valve'. Therefore, the disc allows clingfish to attach themselves to the bottom and withstand strong water currents [212]. All these unique features provide extraordinary inspiration for bio-inspired robots.
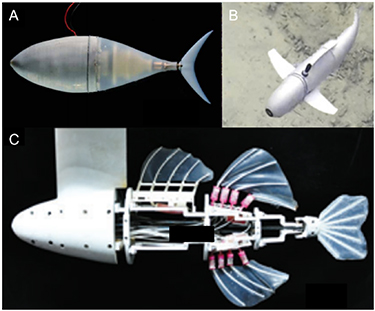
Figure 20. Representative undulatory biorobotic models. (A) Tuna bot that could swim with high frequency. From [196]. Reprinted with permission from AAAS. (B) Acoustically controlled soft robotic fish. From [197]. Reprinted with permission from AAAS. (C) Instantaneous self-propelled robotic fish with soft morphing median fin. Adapted with permission from [198]. Copyright (2018) Soft Robotics.
Download figure:
Standard image High-resolution imageIn summary, undulatory bio-robotic models were proven to be useful scientific tools for studying fish fins, and provide further guidance for underwater robotics with fin-inspired apparatus.
Current and future challenges
During the swimming process of the robotic fish, the active movement of the organism imposes disturbance on the surrounding flow field. At the same time, the flow field imposes a load on the soft material, causing the soft material to passively deform. With different environmental factors, the properties of soft materials will even change accordingly. The interaction between the soft material and fluid is very complicated. It is difficult to calculate and measure the force and the deformation of the soft material. These factors pose great challenges to the motion control of soft robotic fish.
Fins can promote swimming and maintain body balance through active and complex three-dimensional movements, and at the same time can provide sensory feedback of the environments. The realization of the complex three-dimensional motion of the bionic fin requires the integration of soft actuators, watertight electrical control systems, energy storage systems, waterproof sensors, and communication modules. However, the traditional rigid transmission method has a large volume, a complex structure, and a few degrees of freedom, and requires a greater driving force. The existing displacement and force sensors have low sensitivity and insufficient to be used in an underwater environment. These factors restrict the integration of biomimetic flexible fins with complex three-dimensional motion on the robotic fish body.
Advances in science and technology to meet challenges
PIV technology is a two-dimensional visualization technology of the flow field. Its principle is to use a high-energy laser sheet to illuminate the laser particles on a certain layer of the experimental water area, and then use a high-speed camera to influence and analyse the movement of the laser particles to obtain the Flow field structure. Three-dimensional PIV can better reveal the complex three-dimensional structure inside the flow field, more deeply reflect the flow mechanism of the flow field, and essentially reflect the nature of the flow field. Three-dimensional PIV has been successfully applied to detect the transverse flow around the swimming fish in the transverse plane, thereby revealing the propulsion and control mechanism of fish swimming [213].
Computational Fluid Dynamics (CFD) is also another important method for studying fish swimming and morphing fin. CFD simulation can effectively simulate different swimming modes and flow field environment, to conduct in-depth research on a certain scientific problem. Based on CFD technology, the propulsion mechanism of different shapes of caudal fins and the influence of fin morphology changes on swimming during the C-start of fish are well revealed [214–216].
The fin spines or rays are usually rod-shaped with a tip diameter of a few μm, and require many muscle groups to actuate. Therefore, the fabrication of the articulated fin is quite challenging. Recent advances in the field of soft robotics have enabled the development of rapid digital design and manufacturing tools. Researchers use fast and adaptable manufacturing technologies (including 3D/4D multi-material printing [198], shape deposition manufacturing [217], soft lithography technology [218] and layer-up assembly methods [219]) to create rigid/soft robotic components at range of scale. These technologies can combine the use of heterogeneous materials (for example, rubber with different stiffness moduli), embedded electronic components, and internal channels for driving to make composite materials. Direct digital printing using soft materials may be another option for making arbitrary soft structures. A variety of fish-inspired robotic organisms (including undulatory body and morphable fins) can be manufactured using these technologies.
Concluding remarks
New soft materials that can be optical transparent underwater and acoustic transparent in oceanic environments can be useful for future fish-inspired soft robots. Besides, highly deformable soft active materials may provide functionalities of morphing to the underwater soft robot, for example, switching from undulatory to flapping. Moreover, the smart material itself can be used as an actuator of the undulatory robot fish, which can perform flexible and complex movements for the undulatory body and fins.
Acknowledgments
This work was supported mainly by National Key R&D Program of China grant No. 2018YFB1304600, 2019YFB1309600, 2020YFB1313003. This work was also supported by National Science Foundation of China grant Nos. 91848105, 91848206, 92048302, T2121003.
16. Amphibious robots with morphing limbs
Robert Baines, Sree Kalyan Patiballa and Rebecca Kramer-Bottiglio
Department of Mechanical Engineering and Materials Science, Yale University, New Haven, Connecticut 06511, United States of America
Status
Building an effective amphibious robot requires integrating structures and programmed behaviours conducive to both aquatic and terrestrial locomotion within a single robot platform. This design objective is challenging due to the radically varied environmental profiles amphibious robots must transit. For example, water exerts buoyant, inertial, and viscous forces; between water and land is the littoral zone, where crashing waves and fluidized sediment represent high-energy perturbations; on land, gravity presides, and various substrates of different fracture stresses must be traversed. Due to such environmental differences, animal morphology is typically optimized for either terrestrial locomotion or aquatic locomotion, but not both.
Through principled engineering, robots have the potential to circumvent the morphological compromises made by amphibious animals. Amphibious robots fall into either of two classes based on their design. The first class comprises those with multiple, physically separate propulsive mechanisms for moving in the water and on land, like propellers and wheels. The second class includes robots that use one united propulsive mechanism for movement in both media, such as hybrid paddle-legs or an undulating body. Here we focus on robots with united propulsive mechanisms, and more specifically, on limbed robots. Advantages of limbed locomotion include the ability to traverse uneven terrain and engage in a variety of specialized terrestrial and aquatic gaits.
An emerging paradigm in the design of limbed amphibious robots is to engineer limbs capable of morphing between shapes to optimize locomotion for a given environment's force characteristics [220]. This paradigm has evolved to favor on-demand changes in limb shape and stiffness using soft, adaptive materials rather than traditional rigid robotic components. Further research on morphing limbs for amphibious robots promises to usher in the next generation of mobile robots built from a strategic mix of soft and rigid materials. Applications range from bio-monitoring, disaster response, and propulsion study to automated delivery. Moreover, research on morphing limbs will drive materials innovation to meet the stringent requirements of in-situ environmental adaptations.
Current and future challenges
There are three significant and interconnected challenges in developing robots capable of effective amphibious transitions via morphing limbs (figure 21). The first is choosing materials that meet demanding operational criteria. Limb materials must be robust to degradation in water and failure from repeated impacts on land. They must undergo drastic shape changes and preferably, should be able to modulate stiffness, whether by geometric means or through augmentation of intrinsic material properties. Also, the limb materials should be disposed to scalable manufacturing techniques. Programming the limb's shape change is tied directly to materials selection and manufacture. Some mechanism needs to be conceived to facilitate the shape change. The designer must consider how an interplay of material non-linearities, limb geometry, and environmental factors impact morphing performance.
Once the morphing limb is fabricated, it will interface with a robotic platform, which presents a second challenge: to understand the multiphysics of the robotic system and the environment. The multiphysics problem includes, but is not limited to, limbed locomotion in the transition zone between water and land. Little is known about the physics of this zone. Questions include how wave energy and abrasive flows of sediment could jointly impact the robot's stability, how substrate yield stress may undermine a specific gait and shape, and how the limb's material properties could be impacted by temperature and salinity.
Knowledge of governing physics in the transition zone is a prerequisite to the third challenge of optimizing limb shape, stiffness, and gait pattern pairings for a locomotion control policy. There are currently no established control policies for limbed aquatic to terrestrial transition, let alone with the additional free variables of limb shape and stiffness. When developing a transition policy, the designer might have to revisit the material selection of the limb to achieve a baseline level of performance.
The nature of these challenges—materials selection, multiphysics modeling, and design optimization—is interdisciplinary, necessitating collaboration between roboticists, materials scientists, biologists, and physicists. Fortunately, technological advances are beginning to enable amphibious robots with morphing limbs.
Advances in science and technology to meet challenges
The first advance in technology to realizing amphibious robots with morphing limbs was a shift from rigid manually interchanged flippers and legs [221], to hybrid flipper-legs [222]. Noting the inherent performance compromise with hybrid fipper-legs, Liang et al developed morphing limbs from an interlocking compliant mechanism [223]. Structurally speaking, their limb design still did not enable extreme changes in shape. Additionally, from a control perspective, all previous limbed amphibious robots have relied on statically stable, one-degree-of-freedom—per leg terrestrial gaits along with inefficient paddling-based submerged swimming [224].
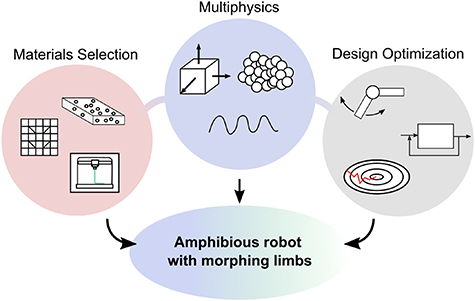
Figure 21. Abstracted challenges when building and deploying an amphibious robot with morphing limbs. Each challenge is intertwined with the others and must be satisfied in order to achieve successful environmental transitions. The result is an interdisciplinary, iterative design process.
Download figure:
Standard image High-resolution imageTo tackle the challenge of materials selection for morphing limbs, we note the promising emerging technologies of hyperelastic fluidic actuators, variable stiffness composites [225], 4D printing, and metamaterials [226]. With these adaptive material systems, it becomes possible to exploit the intersection of geometry and material properties to address drastic programmed shape change, stiffness change, limb robustness, and scalable manufacture simultaneously. For example, recently, we harnessed the capability of fiber-reinforced fluidic actuators coupled to a variable stiffness composite to create a morphing limb (figure 22(A)). The limb is capable of extreme shape changes between sea turtle and land tortoise—inspired limb shapes [227]. We attached four morphing limbs to a quadrupedal body with 3DOF shoulder joints (figure 22(B)) for each limb to achieve highly articulated locomotion in water and on land.
Recent work has also begun to address the challenge of understanding the multiphysics of amphibious robotic transition, starting with the physics of legged locomotion on granular media [228]. Studies like these must be expanded to assess how water content and granule size/dispersity influence locomotion. Overall, an ideal parametric study would controllably vary wave energy, substrate type, incline, and temperature during a walking-to-swimming transition and vice-versa.
Lastly, control policies must be devised that effectively reject, or conversely, harness environmental disturbances for productive locomotion. In concert with physics-based models, recent advances in machine learning can be applied to the transition data to extrapolate viable shape-gait policies across environmental conditions.
Concluding remarks
Significant obstacles still prevent robots from matching the locomotor efficiency and dexterity of living organisms [229]. However, armed with emerging materials technologies and a battery of informed aquatic to terrestrial transition policies, we envision morphing limbs will change the landscape of amphibious robotics, closing the gap on living organisms. Beyond the specific niche of the aquatic to terrestrial transition, we see morphing limbs as part of a new and larger trend in the robotics field. A combination of adaptive soft materials and traditional robotics components synergistically account for each other's deficiencies, enabling functionality that purely soft or rigid materials alone cannot accomplish.

Figure 22. (A) Morphing limbs attached to a quadruped turtle-inspired robot allow it to engage in swimming and walking. The morphing limb is able to switch between flipper and leg shape using variable stiffness materials and fluidic elastomer actuator. Reproduced from [227]. © IOP Publishing Ltd. All rights reserved. (B) Schematic showing how a morphing limb interfaces to the kinematic mechanism within the waterproof bellows.
Download figure:
Standard image High-resolution imageAcknowledgments
This work was supported by the Office of Naval Research under the Young Investigator Program (N00014-17-1-2604). R Baines was supported by the National Science Foundation Graduate Research Fellowship under Grant DGE-1333468.
17. Future undersea observatories with soft robotic instruments
Daniela Rus
CSAIL, MIT Schwarzman College of Computing, United States of America
Status
The study of natural intelligence, in its wide variety of forms, is one of the most profound questions in science today. Understanding the science of intelligence enables the understanding of life itself and supports the engineering of better systems inspired by nature. Effective studies of natural ecosystems require observation from afar, so as to not disturb the normal activity of the ecosystem and are especially challenging in hard to reach underwater environments.
What causes life to thrive in the vast undersea environments? One possible approach to this question is to develop underwater observatories that can enable long-term studies of behaviors of individual sea life, interactions among marine life, and influence of the environmental conditions on the marine life. The observatory generated data which, in turn, can be processed to reveal insights into how life thrives through intelligent behavior, collaboration, and competition. Undersea observatories can be fixed on the bottom of the sea, attached to animals, swim alongside marine life, or even placed in the air, above marine ecosystems of interest. Closeup exploration of wild marine life requires new forms of interaction, using biomimetic instruments that are capable of agile and stealthy maneuvers, equipped with cameras, and supported by remote human operation. In the recent past, the research community has developed a wide range of robotic tools for observations, including quadrotor robots (e.g. for tracking Southern Right Whales [230] and penguins [231]), soft robotic fish (e.g. for exploring underwater coral reef habitats [159, 197, 232, 233]), soft robotic hands (e.g. for biological sampling in coral reefs [234]) and a variety of networked sensors and soft tags [235] that can provide location information for individual animals.
Current and future challenges
Today's underwater observatories enable very short-term studies, but the existing instruments are either passive sensors or autonomous robots with time-limited operation and low endurance, due to their on-board capacity for energy, computation, and data storage required for independent operation. Future underwater observatories will be fixed on the sea floor, suspended in the water column, or possess autonomous mobility. They will include autonomous instruments for long-term studies and offer immersible experiences for scientists. They will consist of intelligent robots and sensors capable of life-long operation, high definition imaging, agile control, live streaming, real-time interaction with humans, and a wide range of algorithms for activity recognition, behavior analysis, and communication and interaction studies. Imagine instruments that are able to capture and convey the experience of being a whale, an octopus, or a shark. There are a myriad of questions about the lives of undersea animals we are not able to answer because we cannot place ourselves side by side long-term observations. With soft robotic avatars, scientists and citizens will be able to virtually attach to an undersea animal or penetrate a group to experience life from their point of view. This in turn will allow us to unravel the mysteries of the undersea life, better understand their behaviors and interactions, and even decode their language. With these approaches, in the future we might even begin to communicate to the whales!
Marine biologists have long experienced the challenges of documenting ocean life, with many species of fish proving quite sensitive to the underwater movements of humans. While multiple types of robotic instruments exist, of particular interest are the soft robots, whose bodies are made out of intrinsically soft and/or extensible materials (e.g. silicone rubbers) move by undulation and thus can more naturally integrate in the undersea ecosystems. The bodies of soft robots have a continuously deformable structure with muscle-like actuation that emulates biological systems and provides them with a relatively large number of degrees of freedom as compared to their hard-bodied counterparts. Soft robots have capabilities beyond what is possible with today's rigid-bodied robots. Soft bodied robots can move in more natural and quieter ways. They bend and twist with complex curvatures and adapt their shape to their environments; they are capable of rapid agile maneuvers; and they can change their stiffness to achieve a task- or environment-specific impedance.
This vision involves challenges at the intersection of materials science, robotics, computer science, physics, mechanical engineering, and electrical engineering that our interdisciplinary team is poised to tackle.
Advances in science and technology to meet challenges
Current research on device-level and algorithmic aspects of soft robots has resulted in a range of novel soft devices [236–238] including soft robotic fish (figure 23, [197]) and soft robotic starfish (figure 24, [239]). Such underwater soft robots are challenging to model and control because of their high degrees of freedom and their intricate coupling with water. For underwater operation, the complex dynamics of how water moves and the challenges with making self-contained water tight systems have made soft underwater robots especially difficult to develop compared to ones for air or land. Additionally, the computational intelligence and control of these robots has been sparsely addressed. How do we get to the point where soft robots deliver on their full potential to enable undersea observatories? This requires breakthroughs in: (a) rapid design tools and fabrication recipes for low-cost soft robots; (b) new algorithmic approaches to the modeling, optimizing, and control of soft robots that include—and exploit—their unique material properties; and (c) capable new systems that demonstrate the benefits of this technology and encourage broad early adopters. Such advances will lead to soft robots that have the ability to compute, sense, and move, leading to a convergence between materials and machines, with materials becoming more intelligent due to embedded electro-mechanical components, and machines becoming softer due to the alternative materials used to create them. This convergence requires tools for functional specification and automated co-design of the soft body (including all the components necessary for actuation, sensing, and computation) and the soft brain (including all software aspects of controlling the device and reasoning about the world and the goal task). Progress in new materials with programmable stiffness properties, proprioceptive sensing, contact modeling, and recipes for rapid fabrication will enable the creation of increasingly more capable soft machines. Additionally, soft robots to date have been impoverished in terms of sensing. Developing dense sensor skin for soft robots will allow these systems to explore the world of high definition touch which in turn will impact their performance. Dense sensor skins will provide the robots with proprioceptive capabilities (to recognize what they are touching) and with exteroceptive capabilities (to respond compliantly to their environment).

Figure 23. SoFi, the soft robotic fish swimming in a coral [236]. Photo credit: Joseph DelPreto.
Download figure:
Standard image High-resolution image
Figure 24. A soft underwater starfish robot. Photo credit: Josie Hughes. Reproduced from [239]. CC BY 4.0.
Download figure:
Standard image High-resolution imageConcluding remarks
Creating the future of Undersea Observatories involves challenges at the intersection of materials science, robotics, computer science, physics, mechanical engineering, and electrical engineering that our interdisciplinary team is poised to tackle. This will result in the science-base for soft, strong, and safe configurable robots that can adapt to a variety of tasks and environments, as well as a suite of devices to enable the future undersea observatories.
Bio-inspired robots like the starfish robot and SoFi can get closer to marine life without disturbing it. In the future, by rapidly designing and building bio-inspired robotic instruments, it will be possible to create custom observatories that can be deployed in the wilderness to observe life.
Acknowledgments
We gratefully acknowledge the following support: NSF Grant No. EFRI-1830901, IARPA Grant No. 2019-19020100001, and DARPA Grant No. FA8750-20-C-0075.
18. Nanoscale soft robots
Peer Fischer1,2 and Friedrich C Simmel3
1Max Planck Institute for Intelligent Systems, Heisenbergstr. 3, 70569 Stuttgart, Germany
2Institute of Physical Chemistry, University of Stuttgart, Pfaffenwaldring 55, Stuttgart 70569, Germany
3Physics Department E14, Technical University Munich, 85748 Garching, Germany
Status
A nanorobot should embody the robotic functions of action, sensing, information processing and possibly communication at the nanoscale, i.e. at a scale that is smaller than a bacterial cell. Assuming that nanorobots will operate in liquids, and since motion is highly damped at these small scales, they are thus inherently 'soft', regardless of the actual material they are made of. This is in contrast to large scale robotic systems, where it is a challenge to find soft motors and actuators. Nevertheless, molecular motors, polymers and DNA play an important role in realizing increased function, control and autonomy on these tiny length scales.
It has proven difficult to realize autonomous nanorobotic systems. Many studies have thus far either focused on implementing only one or at most two functions and/or have relied on external macroscopic support systems that operate in conjunction with the nanoscopic agents. However, recent advances in chemistry, soft matter physics, biophysics, and nanotechnology have shown that some robotic functions can be entirely realized in molecular or nanoscale systems, at least in principle (see figure 25). For instance, supramolecular chemistry as well as DNA nanotechnology have successfully demonstrated synthetic molecular switches, machines and motors, potentially acting as sensors and actuators of nanoscale robots. DNA is particularly attractive, as it is intrinsically an information-encoding molecule and lends itself for DNA-based molecular computing. Further, DNA nanotechnology—notably the so-called 'DNA origami' technique—has enabled the sequence-programmable self-assembly of almost arbitrarily shaped molecular objects [240]. Furthermore, various chemical and physical mechanisms have been employed to switch conformations, and to realize linear walkers and rotatory molecular motors. Thus, in principle, all the major functional components of a robotic system can be realized with DNA alone [241–243].
A parallel area of research concerns the fabrication of inorganic or polymeric nanostructures and their control by external fields, such as magnetic or light fields that induce changes in body shape analogous to those found in biological microswimmers [244]. A further promising recent development is based on the integration of non-equilibrium systems. Similar to the machinery of life, a chemical fuel drives this form of 'active matter'. One exciting prospect besides the locomotion via self-phoresis is that active systems are a means to realizing 'autonomous' behaviors and that they show collective effects [245].
Current and future challenges
While the prototypes demonstrated thus far are promising, many challenges remain. First, the information processing capabilities of individual molecular structures are quite limited—essentially, they are based on switching between two (or a few) states, which means that their computational power compares with (simple) finite state machines. Second, many of the molecular processes involved are relatively slow and therefore cannot respond quickly enough to changes in the environment. Third, nanorobots are, of course, small, which makes it difficult to integrate them into larger systems, or to let them locomote across larger length scales, especially as they need to fight Brownian fluctuations. This calls for new modes of operation that differ from those of macroscopic robots, as well as efficient means to integrate large numbers of molecular units to form a collective system.
While the nanorobotic systems based on inorganic or polymeric particles may be more readily transported over macroscopic distances, it remains a challenge to implement the versatility and information processing capabilities of molecular machines. The chemically fueled self-phoretic swimmers work well in high energy toxic fuels, but struggle to achieve efficient propulsion in physiological environments. Light-actuated polymeric systems show little autonomy and often rely on temperature-induced shape-changes, where an extension to the mechanochemical mechanisms of molecular motors would significantly widen the design space. Medical applications will also require that the materials and structures are fully biocompatible, although some promising biocompatible systems have been identified in magnetically actuated systems [247]. Another challenge that is common to all systems, is the need to increase the force that can be locally achieved so that they may perform useful functions, such as entering a dense tissue. Therefore, much remains to be shown to advance the field.
Advances in science and technology to meet challenges
Multiscale and hybrid robotics
It is hard to beat electronic computers using the limited capabilities of molecules alone—on the other hand, molecular robots are at the right scale to interact with other molecular (and biological) systems. Nanorobots in this case act as bodies with sensors and actuators—the control is outsourced [248]. Advances in imaging are required to permit this approach to work in complex and opaque environments. Most magnetically-controlled systems require bulky instrumentation that is difficult to scale up for real human-scale medical applications and here it becomes necessary to develop new technologies. While this is an engineering challenge, the scientific challenge also remains, that in principle it should be possible to realize synthetic analogs to the machinery of life, and thus autonomous molecular-based nanorobots should be possible without recourse to outside support systems.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 25. Nanorobotic systems realized with supramolecular building blocks (a), (b) or with chemically-active building blocks (c). External field control (d) is a hallmark of many systems thus far, including some DNA-based systems (a). A few nanorobotic systems show some degree of autonomous operation. A separate field of study, which we do not consider here, concerns nanorobotic manipulation systems [246], which are primarily based on large scale equipment for positioning with nanometer resolution. Reproduced from CC BY 4.0.
Download figure:
Standard image High-resolution image{kind=link}
Active matter in soft robotics
Much of the self-assembly and self-organization in biological cellular systems is based on sophisticated non-equilibrium processes. An interesting research direction is therefore to combine active matter with precisely tailored molecular building blocks (made from, e.g. DNA origami). Another exciting possibility is to encode functions found in biological systems, such as artificial chemotaxis. One may thus envision a system with active motion powered by a chemical reaction, in which the nanorobot adapts to the environment, controls the direction of motion and ultimately facilitates the delivery of a molecular cargo to a target.
Swarms and other collective phenomena
In order to overcome the limitations of single nanorobots with limited capabilities, a conceivable strategy is to couple the robots via some physical or chemical interaction and let them move, compute, operate collectively. Similar to the molecular motors that collectively cause macroscopic muscle contractions, here Avogadro's number of molecular machines and nanorobots could work together and cause effects on the macroscopic scale. First steps in this direction have been taken by emulating population-based decision-making processes such as the 'quorum sensing' phenomenon known from bacteria [249]. Physical coupling can lead to apparent 'swarming' behavior of active particles, which may be useful in this context.
Concluding remarks
The road ahead
The capabilities of nanorobotic systems will be dramatically extended when the fields of mechanochemistry, molecular robotics, DNA nanotechnology and active nanosystems join forces, the aim being to realize faster actuators, utilize cooperative effects and implement information processing. Given the limited computing power, nanorobotics needs to develop its own form of embodied computation. Essentially, input-output relationships between sensor and actuator functions need to be directly encoded in the material. A fascinating and entirely open question is how one may achieve learning with soft physicochemical systems. The nanorobots that are powered from the outside face the perpetual challenge of how energy is most efficiently transferred to the nanoscale, and how stronger forces can be exerted. Progress in this field will also spur other technological developments. Solving a real-world problem that finds application outside a research lab will be a major milestone. However, already answering the fundamental questions that arise in nanorobotics is set to impact a number of fields.
Data availability statement
No new data were created or analysed in this study.