
Abstract
Miniature robots and actuators with micrometer or millimeter scale size can be driven by diverse power sources, e.g. chemical fuels, light, magnetic, and acoustic fields. These machines have the potential to access complex narrow spaces, execute medical tasks, perform environmental monitoring, and manipulate micro-objects. Recent advancements in 3D printing techniques have demonstrated great benefits in manufacturing small-scale structures such as customized design with programmable physical properties. Combining 3D printing methods, functional polymers, and active control strategies enables these miniature machines with diverse functionalities to broaden their potentials in medical applications. Herein, this review provides an overview of 3D printing techniques applicable for the fabrication of small-scale machines and printable functional materials, including shape-morphing materials, biomaterials, composite polymers, and self-healing polymers. Functions and applications of tiny robots and actuators fabricated by 3D printing and future perspectives toward small-scale intelligent machines are discussed.
Export citation and abstract BibTeX RIS
Abbreviations
| AAc | acrylic acid |
| CAD | computer-aided design |
| CAL | computed axial lithography |
| CIJ | continuous inkjet printing |
| CLIP | continuous liquid interface production |
| DA | Diels–Alder |
| DIW | direct ink writing |
| DLP | digital light processing |
| DLW | direct laser writing |
| DOD | drop-on-demand |
| FFF | fused filament fabrication |
| GelMA | gelatin methacryloyl |
| LCPs | liquid crystal polymers |
| MeHA | methacrylated hyaluronic acid |
| MOFs | metal–organic frameworks |
| PEGDA | poly(ethylene glycol) diacrylate |
| pNIPAM | poly(N-isopropylacrylamide) |
| PVA | poly(vinyl alcohol) |
| SLS | selective laser sintering |
| SMPs | shape memory polymers |
| TPP | two photon polymerization |
1. Introduction
Miniature machines refer to controllable devices, e.g. robots and actuators, with maximum sizes in millimeters [1, 2]. These devices have attracted great attention because of their broad potential in various engineering fields, including medical applications and environmental remediation [3–9]. Due to their small-scale sizes, miniature robots may access to confined and tortuous spaces such as cerebrovascular network and Eustachian tube [10, 11]. With active control strategies, the robots can execute diverse tasks, for instance, performing precision microsurgery or realizing environmental monitoring [10, 12]. In addition, micro actuators have the potential to perform in-situ cell analysis because of their ability to conduct micromanipulation with high precision [13].
Building small-scale structures with complex geometries poses high resolution requirements opening great challenges in terms of 3D fabrication techniques. Diverse manufacturing methods are developed to construct versatile miniature machines, including molding, assembly, electrochemical deposition, chemical and physical vapor deposition, and additive manufacturing [14–19]. To perform some complex tasks, these miniature machines need to adopt elaborate structures based on application scenarios, such as syringe shape [20], tensegrity structure [21], and burr-like porous spherical shape [22]. Three-dimensional printing techniques emerge as promising tools to construct sophisticated miniature machines since allowing mass customization of complex structures with microscale or nanoscale precision. Combining additive manufacturing methods with CAD makes it possible to build customized curved or porous structures, which remain challenging for other fabrication methods. Moreover, advanced laser writing printing, such as TPP, enable the fabrication of elaborate structures down to submicron or nanoscale [23].
Functional polymers are developed to endow fabricated structures with capabilities of achieving specific functions under external stimuli. Miniature robots and actuators, due to their limited volumes, are difficult to integrate with conventional driven devices or control units. To date, diverse materials with active responses in terms of shape-morphing, degradability, and self-repairing capability have been reported [24]. To execute tasks under diverse physical environmental circumstances, small-scale robots often need to exhibit controllable deformation. Various stimuli-responsive materials have been developed for this purpose, e.g. stimuli-responsive hydrogel, SMPs, LCPs, and magnetic composites [25–28]. Soft machines that undergo large deformation might be susceptible to unexpected damage such as cracks. Self-healing polymers that can repair interfacial bonding are developed to cope with this challenge. In addition, material's biocompatibility and biodegradation are highly desirable when targeting medical applications [29–34]. Miniature machines with the capability of carrying therapeutic cells such as stem cells show great potential for cell therapy [35, 36]. To facilitate the growth and differentiation of therapeutic cells, the controlled machines should provide biocompatible substrates for those cells. Moreover, for materials that cannot be excreted from the body and are not degradable, their long-term accumulation in internal organs can cause acute or chronic inflammation [32, 37]. Several materials such as GelMA and zeolitic imidazolate framework-8 can exhibit minimal cytotoxicity through degradation [38].
Additive manufacturing methods allow the stacking of printable functional materials in a programmable way, which enhances the flexibility in designing miniature robots and actuators and provides versatile strategies to improve the performance of these machines. A large number of factors need to be considered in the design of miniature machines, e.g. power supply and actuation strategies, structural design, function and performance of the devices. The integration of 3D printing techniques and functional materials enables customized design and productions of tiny machines with ease, especially adopting multi-material printing techniques. Moreover, the performance of tiny machines can be optimized by programming the properties of their structures, such as magnetic domains and stiffness. By real-time tuning physical properties of each element during 3D printing processes with the assistance from external fields such as magnetic fields or electric fields, it allows the production of navel programmable machines [19, 39, 40].
In this review, we intend to deliver an overview of the latest advances in 3D printed miniature machines and perspective for future functional miniature machines. The mainstream 3D printing methods to fabricate miniature devices are described at the beginning and printable functional materials including shape-morphing materials, composite polymers, biomaterials, and self-healing polymers are summarized (figure 1). Activated by diverse power sources and control systems, the printed small-scale devices are expected to realize specific functions. Therefore, the emerging functions and applications of 3D printed tiny machines, including navigation and actuation, cargo manipulation, cell and drug delivery, minimally invasive surgery, and self-repairing are highlighted. Finally, the conclusions and future trends in intelligent miniature machines with the capabilities of learning and adaptation are discussed.
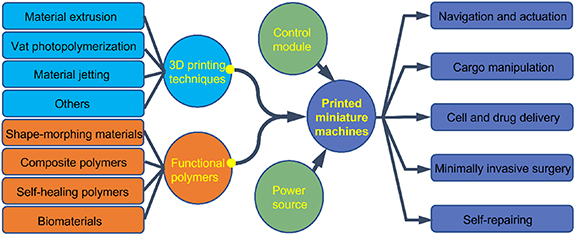
Figure 1. Schematic illustration of 3D printing functional polymers and their functions and applications as miniature machines.
Download figure:
Standard image High-resolution image2. 3D printing methods for miniature machines
Three-dimensional printing techniques can be classified into seven subcategories based on their working principle, these: (a) material extrusion; (b) vat photopolymerization; (c) material jetting; (d) binder jetting; (e) sheet lamination; (f) powder bed fusion; (g) energy deposition (table 1).
Table 1. Comparison of various 3D printing techniques for fabrication of tiny machines.
| Categories | Methods | Typical printing area | Typical printing speed | Typical printing resolution | Pros and cons |
|---|---|---|---|---|---|
| Material extrusion | FFF | 240 × 205 × 235 mm3 [46] | 40–480 mm s−1 [47, 212] | Magnitude of 100 μm [47] | Inexpensive devices vs limited resolution |
| DIW | ∼30 × 30 × 30 mm3 [ 52, 53] | ∼10 mm s−1 [49, 50] | 150–600 μm [50, 53] | Good multimaterial ability; bioprinting vs low printing speed | |
| Vat photopolymerization | DLP | 43 × 27 × 180 mm3 [46] | 0.011–0.111 mm s−1 [213] | ∼7 μm [56] | Good resolution and surface quality vs poor multimaterial ability |
| SLA | 26 × 17 × 156 mm3 [214] | 0.004 mm s−1 [215] | ∼20 μm [76] | Good resolution and surface quality vs poor multimaterial ability | |
| DLW | 2.2 × 2.2 × 0.25 mm3 [23] | ∼0.0006 mm s−1 [23] | ∼0.1 μm [23] | High resolution vs low printing speed | |
| CLIP | 380 × 610 × 760 mm3 [216] | 0.0278–0.2778 mm s−1 [62] | 10–100 μm [62] | Fast printing speed; allow complex geometry design | |
| Material jetting | Inkjet printing | 255 × 252 × 200 mm3 [46] | ∼0.4 mm s−1 [87] | ∼35 μm [86] | Good multimaterial ability vs limited printable materials |
| Powder bed fusion | SLS | 380 × 284 × 380 mm3 [73] | 1500 mm s−1 [73] | 55–500 μm [74] | No support structures vs limited printable materials; poor multimaterial ability |
2.1. Material extrusion
Extrusion techniques use mechanical force to deposit material through a nozzle. With the assistance of three-axis motion platform or motile extrusion nozzles, an extrusion printer could accomplish 2D patterns and build 3D structure by stacking consecutive layers [41]. Among extrusion-based techniques, FFF is the most used one (figure 2(a)). In FFF, thermoplastic polymers are liquefied by a heater near the nozzle and solidified once extruded out the nozzle due to cooling below the glass transition temperature. During the extrusion process of polymeric melt, die swell phenomenon occurs [42, 43]. It means that when the polymeric melt exits the nozzle, the extrudate usually expands resulting in a polymeric filament with a size larger than the diameter of nozzle. Due to the limitations in nozzles diameter and to die swelling phenomenon of the melted polymer, the resolution of FFF printing is often in the order of 100 μm, which is applicable to the fabrication of relatively large robots [14, 21, 44–47].

Figure 2. Schematics configuration of 3D printing techniques. (a) FFF. Reprinted from [41], © 2015 Elsevier Ltd. All rights reserved. (b) DIW. Reprinted by permission from [48]. Springer Nature Customer Service Centre GmbH: Springer Nature, Nature, © 2016, Nature Publishing Group, a division of Macmillan Publishers Limited. All Rights Reserved. (c) Projection-based SLA printing which is a specific technique within DLP. From [39]. Reprinted with permission from AAAS. (d) CLIP. From [62]. Reprinted with permission from AAAS. (e) CAL. From [63]. Reprinted with permission from AAAS. (f) TPP. Reproduced from [75]. CC BY 4.0. (g) SLS. Reprinted with permission from [70]. © 2021, American Chemical Society. (h) Inkjet printing. Reproduced from [85] with permission of The Royal Society of Chemistry.
Download figure:
Standard image High-resolution imageDIW is another powerful extrusion 3D printing technique. In DIW, pseudoplastic polymers with reversible rheological behavior are extruded out by screw, piston, or air pressure (figure 2(b)) [48–50]. The employed ink can retain its shape due to increased viscosity or due to external energy supply causing curing (e.g. ultraviolet (UV) light). The typical planar printing resolution of DIW could reach 150–600 μm, which is in the same order of magnitude as FFF (∼100 μm), but lower than that of vat photopolymerization (0.1–100 μm), as shown in table 1. Although the printing speed of DIW is relatively slow (∼10 mm s−1) compared with that of FFF (40–480 mm s−1), this technique is suitable for a large variety of printing materials, e.g. silicon elastomer and hydrogels, and exhibits significant multimaterial ability, which makes the method attractive for a broad spectrum of applications in robotics [10, 19, 51–55].
2.2. Projection-based 3D printing
Unlike extrusion-based methods, projection-based 3D printing techniques form a pattern on photocurable liquid resin using digital micro-mirror array devices or dynamic liquid crystal masks. Various projection-based 3D printing methods have been developed, including DLP, CLIP, and CAL. DLP form 3D structures by moving the supporting plate and creating sequential pattern on consecutive layers with a resolution down to 7 μm [56]. The two main advantages of DLP include the relatively high printing speed (0.011–0.111 mm s−1) compared with voxel-based printing methods such as DLW (∼0.0006 mm s−1), and the compatibility with diverse composite materials filled with functional micro-/nanoparticles such as magnetic composites and conductive composites, making it ideal for the fabrication of functional robots [57–59]. Various soft robots have been developed through the DLP method in previous studies, including millimeter magnetic soft robots and robotic grippers with autonomic thermoregulation [40, 60]. Projection-based stereolithography (SLA) is a specific technique within the DLP (figure 2(c)), which can print sophisticated 3D structures with resolution down to 0.6 μm [61]. The projection-based 3D printing platform can integrate with voltage generator to tune the alignment of fillers in photopolymer composites and build anisotropic architectures, which has demonstrated high potential in building lightweight reinforced structures [39].
As a developed DLP method, CLIP allows continuous printing by using an oxygen-permeable build window to form a 'dead zone' which greatly improves the printing speed of the conventional DLP method [62] (figure 2(d)). Compared with DLP, CLIP can build more complex structures with large overhangs. Recently, a novel projection-based printing method named CAL was proposed [63, 64] (figure 2(e)). Differently from DLP and CLIP layer-by-layer approach, CAL directly builds volumetric structures by depositing light in a rotating photoresponsive resin. Speed results of CAL (0.036–1.508 mm s−1) are several orders of magnitude higher than the conventional projection-based method such as DLP (0.011–0.111 mm s−1) [63].
The main limitations of projection-based printing methods include the need of photocurable materials and the poor multimaterial ability. Photopolymers, initiating crosslinking reactions to form solid structures under particular light irradiations, account for a relatively small proportion of the whole polymer family. Thus, some efforts have been made to develop more printable polymers with photopolymerizable groups, e.g. the synthesis of acrylamide-terminated or thiol-terminated poly(dimethyl siloxane) polymer as well as the modification of gelatin with methacrylic anhydride [65–68]. In addition, the multimaterial printing strategies for projection-based methods are relatively limited, including replacing the vat and using chemoselective wavelength control, which makes it difficult to build complex heterogeneous structures [60, 69].
2.3. Laser-based point-by-point 3D printing
Laser-based printing methods that pattern one voxel at a time are developed to build 3D structures with high resolution (figures 2(f) and (g)). The light spot excited from a laser source is focused on polymers to melt them or initiate a crosslinking reaction and form a solid structure according to 3D path from CAD designs. SLS, as a representative point-by-point printing method, follows three procedures: (a) powder deposition, (b) powder solidification, and (c) platform lowering (figure 2(g)) [70]. During the printing process, the chamber is filled with metallic or polymer powders, which are not only used as printing material, but also serve as support materials [71–73]. Although complicated and fine structures can be fabricated by SLS, due to the restrictions from its forming principle, available materials for the SLS method are limited and often exhibit poor biocompatibility.
Unlike SLS that employs a laser beam to melt and solidify powders, SLA and DLW methods print each voxel via photopolymerization (figure 2(f)) [74–76]. The SLA method that induces photocrosslinking by absorbing a single photon, is the first vat photopolymerization developed in the 1980s and has found broad biomedical engineering applications [77]. In comparison, DLW initiates two-photon or multi-photon polymerization by femtosecond laser pulses, enabling the printing resolution of DLW to reach 100 nm [78]. Attribute to its high resolution, DLW promises wide applications in the fabrication of functional microrobots [79–83]. Nevertheless, the DLW method is limited by its relatively slow printing speed (∼0.0006 mm s−1) and small printed dimensions (∼2.2 × 2.2 × 0.25 mm3) [23].
2.4. Inkjet printing
Inkjet printing builds solid structures through the selective deposition of droplets [84, 85]. Two different modes, including CIJ and DOD, are adopted by inkjet printing systems (figure 2(h)). For the CIJ mode, inks are continuously pressed out and form charged droplets which can be controlled by a deflector plate. In contrast, DOD mode only produces droplets that are activated by pressure pulse from the system. Generally, CIJ mode reaches a higher printing speed than DOD mode. Since multiple nozzle arrays can be used, the inkjet printing method has excellent multimaterial printing capability. For instance, Sundaram et al utilized the multimaterial inkjet printing method to develop a complex multimaterial magnetic actuator consisting of 186 by 186 by 160 cells with more than 106 design variables [86]. The actuator is viewed as the accumulation of multiple microscale building blocks, which are called 'cells'. Due to the good multimaterial ability of inkjet printing, each cell can be obtained with different materials such as transparent polymer and dark magnetic composites. Thus, the number of cells determines the design variable or design dimension of the actuator. The side length of each cell is in the order of 100 μm and the printed actuator can exhibit targeted high-resolution appearance. The typical printing speed of inkjet printing is on the order of 0.4 mm s−1 [87]. The inkjet printing method is restricted by its printing resolution (∼35 μm) [86], which may hinder its potential application in microrobots.
3. Printable functional polymers
Printable functional polymers enable miniature machines to be actively steered by diverse power sources and execute specific tasks. By using stimuli-responsive material matrices or doping with responsive agents such as magnetic particles, 3D printed structures can achieve controllable actuation and exhibit adaptability to uncertain environments. However, complicated application scenarios usually impose challenges to the lifespan of these 3D printed tiny robots and actuators. Self-healing materials provide a promising solution for this issue. Miniature machines printed by soft polymers can be affected by a variety of factors, such as the delamination of multimaterial structure and the growth of cracks. Materials with self-healing agents could repair damaged polymer networks or interfacial bonding automatically or under external stimuli [88]. For example, Cheng et al demonstrated that magnetic elastomers with dynamic polymer networks could recover from cut damage to extend the lifespan of soft robots [29]. In addition, to weaken the potential negative impacts of miniature robots on surrounding environments, especially the physiological environments, the biocompatibility and biodegradability of printed materials need to be considered.
3.1. Shape-morphing materials
Herein, we discuss functional material matrices able to actively undergo shape morphing without the incorporation of micro/nanoparticles, which can be divided into stimuli-responsive hydrogels, shape-memory polymers, and liquid crystal elastomers (table 2).
Table 2. Summary of functional polymers and their printing methods.
| Category | Materials | Printing method | Applications |
|---|---|---|---|
| Stimuli-responsive hydrogel | NIPAM [104], AAc [97], alginate hydrogels [98], spiropyran hydrogels [95] | DIW, DLP, SLA, TPP, inkjet printing | Soft grippers, soft actuators [13, 93] |
| Shape memory polymer | Acrylate-based polymer [110], thermoplastic polyurethane polymers [111] | FFF, DIW, DLP, SLA, TPP, inkjet printing | Soft robots, intelligent origami structures [105, 108, 109] |
| Liquid crystal polymers (LCPs) | Liquid crystal mesogens RM257 [211] | DIW, DLP, TPP | Soft actuators, metamaterial structures [54, 211] |
| Biodegradable and biocompatible polymers | GelMA [32], MeHA [158], PEGDA [31] | DIW, DLP, SLA, TPP, inkjet printing | Cell and drug delivery, tissue scaffolds [31, 32, 68] |
| Magnetic composite polymers | Silicone elastomer/NdFeB particles [19], UV resin/NdFeB particles [40], PNIPAM hydrogel/NdFeB particles [120], PEGDA/superparamagnetic particles [133], carbomer-acrylamide hydrogel/Fe3O4 ink [132] | DIW, DLP, SLA, inkjet printing | Soft robots, minimally invasive surgery, cargo manipulation [10, 40] |
| Conductive composite polymers | Sodium alginate/graphene oxide [143], photocurable resin/graphene nanoplatelets [39], polyacrylamide-alginate hydrogel/silver flakes [139] | DIW, DLP, SLA, inkjet printing | Soft robots, soft electronics [139, 143] |
| Self-healing polymers | PVA-AAc-PEGDA hydrogel [154], polyurethane elastomer [153] | FFF, DIW, DLP, SLA | Soft actuators, modular assembly [151, 155] |
3.1.1. Stimuli-responsive hydrogels
As an important class of intelligent materials, stimuli-responsive hydrogels feature broadly tunable chemical properties and myriad of formation mechanisms. Hydrogels are formed through the crosslinking of hydrophilic polymers infiltrated with water [89]. A variety of mechanisms, including chemical crosslinking, ionic crosslinking, and physical entanglement, have been developed for hydrogel materials synthesis, allowing them to be compatible with multiple printing methods, e.g. vat photopolymerization, DIW, and inkjet printing [53, 89–91]. Hydrogel structures can respond to diverse environmental stimuli including temperature, pH, ion concentration and light, with controllable shape-changing properties [13, 92–98].
Temperature responsive hydrogels have been widely used for small-scale robots because they are easy to control remotely. When the solution temperature exceeds or falls below a critical temperature, the hydrogel structure shows reversible shrinkage or swelling. pNIPAM hydrogel is a classic example of temperature-responsive hydrogel [92, 99]. At low temperatures, the polymer networks are hydrophilic and exhibit random coil conformation due to the hydration of isopropyl groups of pNIPAM. When the temperature exceeds the lower critical solution temperature of pNIPAM, the polymer network conformation transits into a globule state and exceeding water is discharged out of the network, which causes the shrinkage of the hydrogel structure. Lee et al used TPP to fabricate pNIPAM-based mobile micromachines which can penetrate through a narrow channel by increasing the environmental temperature [100]. Programmable shape-morphing features are highly desirable for small-scale robots. Four-dimensional (4D) printing technique, which refers to that the printed structure owns the ability to change shape or function upon a predetermined external stimulus, has attracted considerable interest [101]. A fourth dimension, i.e. time, is added to the printing of 3D objects. To achieve targeted shape morphing, the 4D printing technique generally relies on the control of filler orientation (such as the alignment of cellulose fibrils within photocurable hydrogel ink) or crosslink density of polymer network [53, 102]. Combined with this technique, pNIPAM hydrogel structures with programmable deformation have been developed. Nojoomi et al proposed a new pNIPAM hydrogel with a crosslink density that can be tuned via the UV light dose [90, 103]. Using DLP, pNIPAM sheets can deform into a variety of complex Gaussian surfaces and achieve ray-inspired motion (figure 3(a)).

Figure 3. Smart shape-morphing material examples from the state of the art. (a) DLP printing of temperature responsive hydrogel sheets deforming into diverse complex Gaussian surfaces. Reproduced from [103]. CC BY 4.0. (b) DLW printing of pH responsive hydrogel to achieve botanical-inspired shape transformation. [93] John Wiley & Sons. © 2019 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim. (c) Inkjet printing of shape memory polymer with reprogrammable deformation. From [108]. Reprinted with permission from AAAS. (d) DLP printing of shape memory polymer for modular assembly of a lattice structure. The shape recovery of the multi-layer lattice structure is induced by infrared heat. Reprinted from [109], © 2020 Elsevier Inc. (e) DLW printing of liquid crystal elastomer with programmed voxelated director fields. The liquid crystal elastomer microstructures with different molecular alignments can achieve different 3D to 3D shape transformations. Reproduced from [117]. CC BY 4.0. (f) DIW printing of liquid crystal elastomer bilayer structure which can deform into twisted structure in hot water. The bilayer structure is designed with different printing paths. From [211]. Reprinted with permission from AAAS.
Download figure:
Standard image High-resolution imagepH responsive hydrogels have also drawn significant attention. As an example, in AAc hydrogel, weak electrostatic repulsions are formed by its pendant acidic (carboxylic) groups in acidic solution. The repulsions become strong in alkaline solutions by protons release, which could induce the swelling of the hydrogel structure. Recently, Li et al fabricated pH-sensitive micropillar arrays and microcages by DLW method to reversely trap and release particles and cells, thus demonstrating the potential applications of pH-responsive actuators in object manipulation and drug delivery [13] (figure 3(b)).
Although stimuli-responsive hydrogels have high deformability, the mechanical properties of conventional hydrogels are usually weak, especially in terms of toughness. To address this issue, mechanisms including double-network hydrogels and dual crosslinking hydrogels have been developed. Recently, Hua et al grafted a thermo-responsive monomer to PVA backbones to construct hydrogel networks with both high toughness and fast responsiveness [104].
3.1.2. Shape memory polymer
As a class of stimuli-responsive material, SMPs can take on temporary shapes and recover to their original configuration upon external stimulation, e.g. based on temperature and light [105]. When the temperature exceeds the glass-transition temperature of SMPs, they undergo a transition from 'glassy state' to 'rubbery state' resulting in a significant decrease of stiffness. A variety of printing methods, including DIW and microSLA have been applied to SMPs [106, 107]. In recent studies, Ding et al developed a 4D printing process for SMPs by programming a built-in compressive strain between SMPs and an elastomer, enabling the reprogrammable shape-shifting of printed shape memory structure upon heating and cooling [108] (figure 3(c)). Fang et al proposed modular 4D printing of light curable SMPs. Through the interfacial bonding of different morphing module, various sophisticated shape memory devices are fabricated [109] (figure 3(d)). The in-situ tunable mechanical property of SMPs allows them to find broad applications in reconfigurable soft robots, especially when combined with external power sources. For instance, magnetic SMPs are actuated by magnetic fields and controlled by photothermal or magnetic heating effects [110, 111].
3.1.3. Liquid crystal polymers (LCPs)
Liquid crystals are a state of matter different from liquid and solid crystals. Polymers exhibiting liquid crystallinity are referred to as LCPs. Two distinct mechanisms have been exploited to drive the shape-shifting of LCPs, including thermomechanical and photomechanical effects [112–114]. LCPs transit from nematic to isotropic state upon heating which results in a shrinkage strain [115]. By crosslinking azobenzene molecules into liquid crystal networks, their photoisomerization leads to the deformation of LCPs under irradiation with particular wavelengths. Three-dimensional printing techniques like DIW, DLP, and DLW endow LCPs with advanced shape-changing capability, e.g. 3D-to-3D shape transformation [54, 116, 117] (figures 3(e) and (f)). Guo et al fabricated 3D LCPs microstructure by DLW method with the voxel-by-voxel encoding of nematic alignment. They demonstrated different deformation structures of LCPs with the same geometry design but different nematic alignments [117].
3.2. Composite polymers
Single constituent materials often cannot meet the multiple functional requirements of microrobotics. As a promising solution, micro/nano doping agents cannot only improve the printability of matrix materials, but also endow printed structures with new properties, e.g. magnetism, conductivity, and photothermal conversion [118–120]. Magnetically actuated robots have drawn great attention due to their remote controllability and fast shape-morphing capability [35, 121–130]. By adding magnetic particles into the matrix material, printed structures can be controlled by magnetic force or torque. Chin et al developed 3D printed implantable microdevices using poly(ethylene glycol) hydrogels doped with iron oxide nanoparticles which allow the remote and controlled release of drugs [131]. Chen et al demonstrated a new Carbomer-acrylamide magnetic ink to fabricate an octopus-inspired soft robot which shows rapid response to magnetic stimuli [132] (figure 4(a)), where Carbomer is a kind of cross-linked AAc polymer and serves as rheology modifiers for DIW printing due to its shear thinning property. To realize the programmable deformation of magnetic structures, various magnetic-assisted printing methods that can form anisotropy magnetic chains and magnetic domains have been developed [19, 40, 133]. By applying magnetic fields during photopolymerization, Kim et al achieved that soft magnetic particles with programmable alignment can be patterned into hydrogel sheet [133]. Xu et al patterned hard magnetic particles into photonsensitive resins to fabricate various magnetic sheets with 3D discrete magnetization profiles [40] (figure 4(b)). To build 3D structures with programmable magnetization domains, Zhao et al developed a new DIW printing method that utilizes magnetic coils mounted on the nozzle to reorient magnetic particles during printing [19]. These magnetic composite materials demonstrated a variety of applications in biomedical devices, flexible electronics, and soft robotics [110, 134].

Figure 4. Functional composite polymers employed as printable inks. (a) DIW printing of magnetic composites to fabricate octopus robot which can be manipulated by permanent magnet. The magnetic composite is composed of acrylamide-carbomer ink doped with Fe3O4 nanoparticles. [132] John Wiley & Sons. © 2019 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim. (b) Magnetic structures with programmable 3D magnetization printed by DLP method. The printable material in this study is prepared by mixing UV resin with NdFeB microparticles. From [40]. Reprinted with permission from AAAS. (c) Electrically-assisted projection based SLA to create anisotropic architectures. Commercialized photopolymer resin mixed with multiwalled carbon nanotubes is used in this study. [141] John Wiley & Sons. © 2017 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim. (d) DIW printing of graphene oxide/sodium alginate composites to fabricate ionic conducting microribbon. Reproduced with permission from [143].
Download figure:
Standard image High-resolution imageBesides magnetic composites, other mechanically anisotropic and conductive materials can be obtained by doping polymeric matrices with functional additives [39, 135–139]. For instance, Gladman et al proposed a 4D printing strategy by controlling the alignment of cellulose fibrils during DIW printing process to fabricate diverse plant-inspired deformable architectures [53]. Apart from nanofibrillated cellulose, magnetic particles and carbon nanotubes also have been applied to construct mechanically anisotropic structures [140, 141] (figure 4(c)). Taking advantage of biomimetic design strategies, these structures exhibit reinforced mechanical performance. To obtain conductive structures, additives including graphene oxide, carbon nanotube, graphene nanoplatelets have been employed as doping agents [39, 142, 143]. Zhang et al utilized the self-assembly of graphene oxide nanoflakes dispersed in a polymeric matrix during 3D printing to build conductive and deformable microribbons, showing impressive potential in neural electrodes [143] (figure 4(d)).
3.3. Self-healing polymers
Self-healing properties enable polymers to repair damages or form interfacial bonding. To achieve this property, various dynamic covalent networks and noncovalent interaction mechanisms have been developed, e.g. DA reaction, disulfide bonds, and hydrogen bonds [30, 88, 144–151]. For instance, Li et al used DLP printing to fabricate self-healing elastomeric structures with disulfide bonds achieving healing efficiency of up to 95% [152] (figure 5(a)). To realize precise self-healing, Zhang et al demonstrated near-infrared (NIR)-triggered self-healing structures fabricated by the DIW method with shape memory polyurethanes [153]. Targeted self-healing behavior can be achieved via the control of NIR laser. Besides, the autonomous self-healing of 3D printed structures is realized by Caprioli et al [154] (figure 5(b)). They designed a hydrogel network by using PEGDA, AAc, and PVA as (macro)monomers. Complex 3D structures are printed by the DLP printing method and automatic self-healing properties are achieved by hydrogen bonding. Apart from the self-repairing effect, the self-healing property can endow 3D printed structures with other potential advantages, including modular assembly and reconfiguration. Recent works done by Kuang et al and Cheng et al demonstrate unique functionalities of self-healing magnetic polymers for reconfigurable soft robots including the assembly and magnetization reprogramming of magnetic elastomers [29, 155]. For example, magnetic modules with different magnetization profiles can be welded together by strong interfacial bonding activated by heating. Various 2D or 3D structures with on-demand heterogeneous magnetization profiles can be obtained by utilizing the self-healing property. Moreover, the dynamic polymer network developed by Kuang et al also allows the realignment of magnetic particles via infrared light illumination and an external magnetic field to reprogram the magnetization pattern.

Figure 5. Printed self-healing polymeric structures. (a) DLP printing of self-healing polyurethane elastomers with dynamic disulfide bonds which can form interfacial bonding upon heat. Reprinted with permission from [152]. © 2019, American Chemical Society. (b) DLP printing of AAc-PVA hydrogel. The printed structures could restore from cut damage without external stimuli. Reproduced from [154]. CC BY 4.0.
Download figure:
Standard image High-resolution image3.4. Biomaterials
Microrobots that can execute complex tasks in physiological environment promise benefits in numerous medical scenarios, including targeted delivery and minimally invasive therapy. To realize biomedical goals, requirements regarding biocompatibility and biodegradability are imposed on polymers for fabricating robots. For example, the cytotoxicity of materials needs to be negligible [38, 156, 157]. A variety of printable and biocompatible polymers have been proposed in microrobotics, including GelMA (figure 6(a)), PEGDA (figure 6(b)), MeHA (figure 6(c)), and methacrylamide chitosan (figure 6(d)) [31, 32, 68, 158, 159]. PEGDA is a common drug carrier and exhibits interesting stealth properties. Researchers have validated the degradability of microswimmers composed of PEGDA and pentaerythritol triacrylate (PETA) in sodium hydroxide solution [31]. However, such alkaline solutions are not preferred in vivo and products from hydrolysis reactions are difficult to excrete from the human body. In contrast, GelMA and MeHA can be enzymatically degraded by enzyme collagenase and hyaluronidases, respectively, which make them more suitable for the fabrication of biodegradable microrobots as well as cell-laden scaffolds.
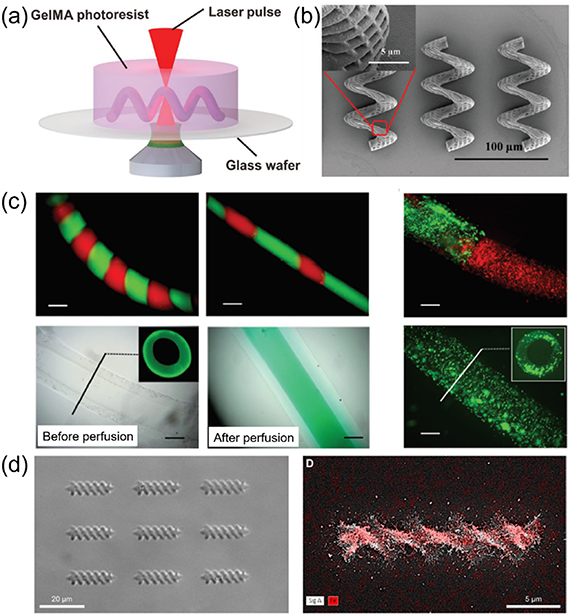
Figure 6. Biodegradable and biocompatible printable polymers in microrobotics applications. (a) GelMA helical microstructures with a length of ∼30 μm printed by TPP. The GelMA polymer can be degraded in enzyme solution. [32] John Wiley & Sons. © 2018 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim. (b) Porous helical structures with a length of 120 μm printed with PEGDA-PETA photoresist via TPP. The helical body is degradable in NaOH solution. [31] John Wiley & Sons. © 2020 Wiley‐VCH GmbH. (c) DIW bioprinting of heterogeneous and hollow structures. A range of bioinks including MeHA hydrogel are selected in this study. [158] John Wiley & Sons. © 2016 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim. (d) TPP printing of double-helical structures of 20 μm length with methacrylamide chitosan. The printed structures are enzymatically biodegradable. Reprinted with permission from [159]. © 2018, American Chemical Society.
Download figure:
Standard image High-resolution image4. Functions and applications of 3D printed miniature machines
Three-dimensional printing techniques stack functional materials in a programmable way to construct miniature machines. Significant efforts in improving printing methods and printable materials promote the printed devices to find a broad spectrum of applications. In this section, we focus on recent advances of 3D printed tiny robots and actuators in terms of functions and engineering applications, including navigation and actuation, cargo manipulation, cell and drug delivery, minimally invasive surgery, and self-repairing.
4.1. Navigation and actuation
Three-dimensional printed microrobots can be actuated by various mechanisms, including self-propulsion, external field propulsion, and hybrid strategies. Self-propelled microrobots usually derive energy from chemical fuels. Chemical reactions, e.g. catalytic decomposition of H2O2, have been applied to propel microrobots such as 3D printed microfish developed by Zhu et al and doughnut-like microswimmers fabricated by Baker et al [5, 160, 161] (figure 7(a)).
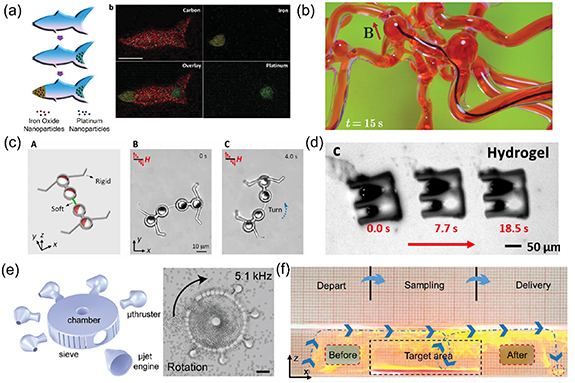
Figure 7. Navigation and actuation under different kind of stimuli. (a) DLP printed microfish with the length of 120 μm powered by chemical fuel (H2O2 solution). [5] John Wiley & Sons. © 2015 WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim. (b) Submillimeter-scale soft continuum magnetic robots fabricated by DIW printing or injection molding. The continuum magnetic robots can be actively steered by permanent magnet demonstrating navigation capability in 3D cerebrovascular phantom network. From [10]. Reprinted with permission from AAAS. (c) TPP printing of magnetic machines with a size of less than 100 μm. The 3D magnetic structures are printed using GelMA hydrogel, IP-L photoresist, and magnetic Janus particles. Reproduced from [173]. CC BY 4.0. (d) Acoustic microrobots with a length of ∼150 μm fabricated by ultraviolet photopolymerization. The air bubble trapped inside the microrobot enables its propulsion under acoustic wave. Reproduced from [181]. CC BY 4.0. (e) Acoustically powered addressable microsystems fabricated by TPP. Reproduced from [182]. CC BY 4.0. (f) Millimeter-scale robot actuated by Marangoni effect and photothermal buoyancy flow. The light driven robot can perform 3D manipulation and remote sampling. [187] John Wiley & Sons. © 2021 Wiley‐VCH GmbH.
Download figure:
Standard image High-resolution imageExternal energy sources such as magnetic fields, acoustic fields, electric fields, light, thermal energy, pneumatic, and hydraulic power appear promising in the precise control of 3D printed microrobots [162–167]. Magnetic actuation has drawn great attention due to its high penetration depth into tissues, multi-degree of freedom control, and safety [168–170]. One intuitive strategy for magnetic actuation is using magnetic gradients generated by permanent magnets or electromagnets. Based on the properties of the manipulated objects, magnetic forces drive them to move along the gradient of magnetic fields or in the opposite direction. Kim et al used DIW to fabricate ferromagnetic fibers, which allow precise navigation within a tortuous phantom under permanent magnets [10] (figure 7(b)). The navigation capability of the continuum robots demonstrates promising potential in minimal invasive surgery. Another typical strategy for the actuation of magnetic microrobots control is magnetic torque powered propulsion induced by a uniform but time-varying magnetic field [171]. A representative example is the helical corkscrew motion under a rotating magnetic field [17, 30, 172]. A variety of helical microstructures coated or doped with magnetic components, including nickel and iron oxide, have been fabricated and show efficient propulsion at a low Reynolds number regime. Apart from helical propulsion, soft magnetic composites with discrete or continuum magnetization exhibit other multiple locomotion modes such as crawling and undulatory swimming. Xu et al developed a millimeter-scale multi-legged magnetic robot with 3D discrete magnetization [40]. By applying a rotating magnetic field, each leg can alternately kick with the ground, producing paddle-crawling gait. Hu et al employed TPP to fabricate micrometer-scale robots composed of Janus magnetic particles, soft and rigid links (figure 7(c)) [173]. By programming magnetic states of each Janus particle and by applying an oscillating magnetic field, the microrobot can walk on a surface.
Acoustic fields have been widely used in clinical applications, including imaging and thermal therapy. Due to the good feasibility of ultrasound in biomedical applications (e.g. deep tissue penetration and no ionizing radiation), the fast responsiveness as well as independent control capability of acoustic actuation, researchers devoted burgeoning efforts to developing acoustic powered microrobots [174–180]. The mechanisms of acoustic propulsion include bubble-assisted actuation and acoustic radiation force. Recently, Aghakhani et al proposed an acoustic powered microrobot fabricated by TPP [179]. The bullet-shaped microrobot with an internal cavity could trap air bubble that can be resonated by the acoustic wave and induces thrust force. Ahmed et al developed acoustic-powered microswimmers (∼150 μm in length) using ultraviolet photopolymerization (figure 7(d)) [181]. Two air bubbles were trapped inside the microswimmer which has the ability to perform linear translation and rotation motion under acoustic actuation. While bubble-assisted microrobots have demonstrated fast locomotion, the bubbles trapped feature reduced lifetime, hindering their potential application. Without the incorporation of air bubbles, Kaynak et al developed a modular micromachine with sharp-edged solid structures which can induce vortices and localized jets under the stimulus of acoustic wave [182] (figure 7(e)).
Other power sources, such as light and electric stimuli, have also been developed for the actuation of 3D printed millirobots [57]. Light field actuation features better spatial resolution compared with other actuation strategies, allowing precise and selective control [183–186]. A light-driven millimeter-scale robot (∼5 mm length) composed of pNIPAM hydrogel and photothermal nanoparticles was developed by Pan et al which can be manipulated in 3D space by photothermal buoyancy flow and Marangoni effect [187] (figure 7(f)). When the hydrogel robot is immersed in water and irradiated by a laser, the CuS nanoparticles filled in the robot body could convert light energy into thermal energy and induce the increasing temperature of the robot and surrounding fluid. The local fluid with increasing temperature will cause the decrease of the fluid density and a buoyancy flow will be generated. When the robot floats on the air–water interface, the laser induced heat would create a surface tension gradient and then cause a Marangoni flow to drive the robot. Electric fields can achieve fast actuation and require less complex control systems. Han et al developed a DLP-printed millimeter-scale robot (∼10 mm in height) fabricated with electroactive hydrogel that can move directionally under electric stimuli [57].
4.2. Cargo manipulation
Miniature robots and actuators with shape morphing features are capable of manipulating cargo for active delivery or in-situ analysis. Li et al proposed a micropillar array via asymmetric DLW method, which can undergo reversible deformation upon pH changes [13] (figure 8(a)). The pH-responsive microgripper provides a platform for the in-situ capture of microparticles and neural stem cells with diameters of 10–15 μm, demonstrating the great manipulation resolution of DLW printed structures. Moreover, the 3D printed structure can also be integrated with a 3D moving stage allowing the precise control of micro objects [188] (figure 8(b)). Ma et al developed a multimaterial TPP printing strategy to fabricate a microgripper with rigid SU-8 resin and pH-responsive protein. By utilizing a microfluidic chip, the printable polymers can be injected into photopolymerization chamber or removed on demand to realize the sequential printing of different materials in the same microstructure. With the assistance of the motion stage and surrounding media with tunable pH values, the microgripper (∼30 μm side length) can precisely capture and transport a micro cube with the size of 10 μm. Recently, Baker et al developed self-propelled microtori using TPP printing [160] (figure 8(c)). The microtori is coated with Pt and Ni layers endowing the structure with responsiveness to multiple stimuli, including catalyst (H2O2) and magnetic field. Based on the electrodynamic attachment of the microtori, the capability of transporting a variety of cargoes, including artificial swimmers, colloidal particles, and bimetallic nanorods was demonstrated. To achieve the precise manipulation in a remote controlled manner, Xu et al developed a multi-arm magnetic gripper by DLP printing. Due to the resolution limitation (100 μm) of DLP printing, only a millimeter-scale cargo (∼2 mm length) is manipulated by the gripper (∼5 mm length). Nevertheless, the gripper achieved the wireless grasping, transporting, and releasing in an unstructured environment [40] (figure 8(d)).

Figure 8. Cargo manipulation via printed microstructures. (a) DLW printing of pH-responsive microgripper. The microgripper is composed of four microtubes with a height of 60 μm and is capable of trapping Polystyrene (PS) microspheres (13 μm diameter) and neural stem cells (∼15 μm diameter). Reprinted with permission from [13]. © 2020, American Chemical Society. (b) pH-responsive microgripper with a length of ∼30 μm integrated with a 3D moving stage to capture and release a SU-8 cargo (10 μm side length). Reproduced from [188]. CC BY 4.0. (c) Doughnut-like microswimmer (7 μm diameter) powered by chemical fuel to manipulate 2 μm long bimetallic nanorods using hydro- and electrodynamic attachment. Reproduced from [160]. CC BY 4.0. (d) DLP printing of millimeter-scale magnetic gripper (∼5 mm length) to grasp, transport, and release polydimethylsiloxane cargo (∼2 mm length) under the control of electromagnetic coil system. From [40]. Reprinted with permission from AAAS.
Download figure:
Standard image High-resolution image4.3. Cell and drug delivery
Small-scale robots fabricated by 3D printing techniques and functional polymers greatly promote the development of intelligent delivery systems for biomedical applications. Precisely manipulating neural network is highly desirable to study brain function and neurodegenerative diseases. Kim et al developed a neuron-loaded microrobot by using DLW printing of IP-S photoresist followed by the deposition of Ni and TiO2 thin layer [189] (figure 9(a)). The IP-S photoresist is a commercialized biocompatible photocurable polymer developed by Nanoscribe GmbH and designed for dip-in laser lithography [189]. To align and direct the outgrowth of neurites, the microrobot is printed with an array of longitudinal microgrooves. Owing to the magnetic coating, the microrobot loaded with rat hippocampal cells can be wirelessly delivered to the gap between neuron clusters and selectively connect neural networks. The neuron-loaded microrobot is expected to provide a platform for the fundamental study of brain function. Stem cell therapy has been developed to restore damaged tissues, such as the death of neurons caused by Alzheimer's disease. To achieve the targeted delivery of therapeutic cells, Jeon et al fabricated multiple 3D scaffold-type microrobots via 3D printing of IP-Dip photoresist and sputtering of Ni and Ti layers [36] (figure 9(b)). With such material and structural design, the magnetic microrobots can precisely deliver stem cells such as mesenchymal stem cells in vitro and in vivo, which indicates the potential clinical application of stem cell transplantation assisted with magnetic microrobots.
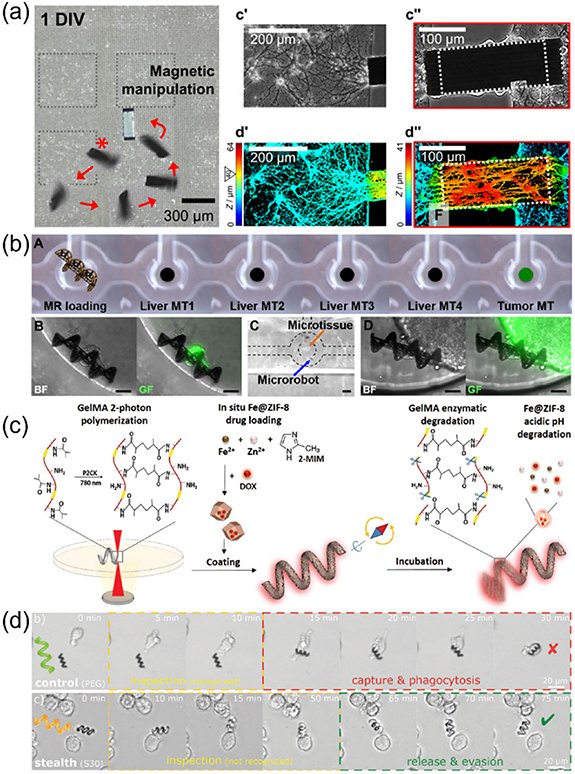
Figure 9. Cell and drug delivery printed microsystems. (a) Magnetically actuated microrobot (300 μm length) loaded with cultured neural cells to build neural network connection between two neural clusters. From [189]. Reprinted with permission from AAAS. (b) TPP printed scaffold-type magnetic microrobots (∼200 μm length) to deliver stem cell in an in vitro network comprised liver and tumor microtissues. From [36]. Reprinted with permission from AAAS. (c) TPP printing of GelMA helical structure (∼100 μm length) coated with MOF. Due to the pH-trigged degradability of MOF, drug loaded in MOF can be released in buffer solution at acidic or physiological conditions. [38] John Wiley & Sons. © 2020 Wiley‐VCH GmbH. (d) The stealth property of zwitterionic helical microrobots (∼20 μm length). Compared with PEGDA based robots, the microrobot printed with zwitterionic hydrogel can be released after the inspection of immune cells. Reproduced from [193]. CC BY 4.0.
Download figure:
Standard image High-resolution imageThe active delivery of drugs to hard-to-reach sites for minimally invasive therapy is a long term objective pursued by clinicians and researchers. However, drug delivery systems based on microrobots are often limited by their low delivery efficiencies, and by the poor biocompatibility and biodegradability of the materials used. In a recent work by Terzopoulou et al, biodegradable helical microswimmers were fabricated by DLW printing of GelMA hydrogel with a surface coating of MOFs whose porous structures allow a superior loading of drugs [38] (figure 9(c)). The matrix polymer and the MOF coating are both degradable by enzymes and pH stimuli from the environment, respectively. Experimental results demonstrated that the MOF particles degraded after 120 h and the integrated GelMA-MOF helical robot degraded after 14 d. Such fully biodegradable microswimmers are expected to perform drug delivery in physiological environment. Currently, considerable examples of biodegradable microswimmers have been demonstrated in vitro with physiological condition. For example, the biodegradability of GelMA-MOF helical robot and Spirulina microalgae based magnetic microrobot was verified in living cell culture and Dulbecco's phosphate-buffered saline, respectively [38, 190]. The in vivo performances of biodegradable microswimmers are studied in several recent reports, such as the biodegradation of poly(lactic-co-glycolic acid) based magnetic microrobot in a rabbit knee [37]. The development of biodegradable miniature machines that can perform in vivo medical surgery remains a huge challenge, e.g. the precise tracking and control of miniature machines under deep tissue as well as the on-demand triggered degradation of robot body [37, 165, 191, 192]. Therefore, the clinical application of biodegradable miniature machines has a long way to go. Another critical issue for a drug delivery system is the natural protection mechanism of the immune system, which may hinder the locomotion of microrobots and target reaching. In this respect, Calbanach et al devised stealth microrobots by microprinting of zwitterionic hydrogel into helical shape [193] (figure 9(d)). The non-immunogenic microrobot can avoid the recognition from macrophage cells of the immune system. The proposed zwitterionic materials based microrobots are expected to tackle a major roadblock from immune clearance.
4.4. Minimally invasive surgery
Three-dimensional printed miniature machines with precisely controllable features provide promising tools for therapeutic and diagnostic applications. Due to their ability to explore complex and constrained environments, soft continuum robots have been used in abdominal and cardiac surgeries [194]. For conventional continuum robots, miniaturization and surface friction reduction remain challenging. In this respect, Kim et al developed a submillimeter-scale magnetic continuum robot with a core–shell structure [10] (figure 10(a)). Magnetic core fabricated by DIW printing or injection molding of silicon elastomer enables the small-scale robot to be actively manipulated by magnetic fields, and its hydrogel skin can significantly reduce the surface friction. The small-scale continuum robot not only proved efficient navigation capability in a complex environment but also can incorporate optical fiber to achieve steerable laser delivery. Wang et al also reported a set of evolutionary design based tools to enhance the workspace of continuum robots [195]. The evolutionary design strategy integrates the genetic algorithm and theoretical modeling of magnetic continuum robots to determine optimal magnetization and rigidity pattern of the robots and achieve maximal workspace. To achieve large-angle steering of continuum robot, Zhang et al developed a hybrid-actuated millimeter-scale continuum robot demonstrating the potential for nasopharyngeal sampling [196] (figure 10(b)). The small-scale robot consists of a hollow skeleton wall fabricated via a microscale 3D printing system followed by a layer of ferromagnetic elastomer coating. The millimeter-scale continuum robot is navigated through nostrils until its tip reaches a target position for therapy. Although these small-scale continuum robots exhibit great navigation capability, they lack the ability to actively tune their stiffnesses [194]. In this regard, phase-change materials such as liquid metals can be employed as printing inks to build variable stiffness devices, promising to improve the adaptability of the tiny robotic agents to different environments [197].
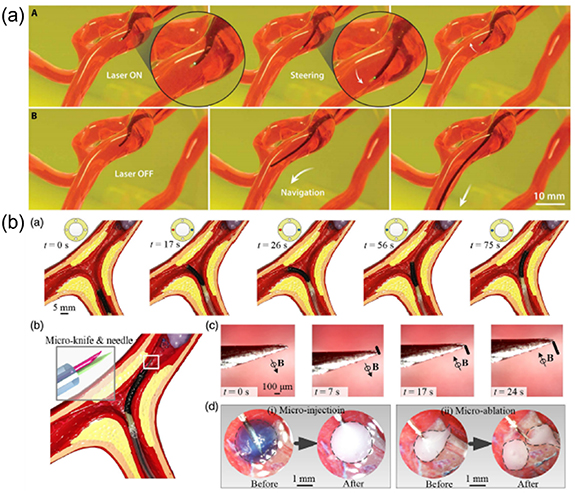
Figure 10. Minimally invasive surgery performed with miniature robots. (a) Submillimeter-scale magnetic continuum robot incorporated with optical fiber to achieve laser delivery in a carotid artery phantom. From [10]. Reprinted with permission from AAAS. (b) Demonstration of nasopharyngeal sampling and target therapy processes by using a millimeter-scale soft continuum robot with hybrid magnetic and tendon driven mechanism. Reproduced from [196]. CC BY 4.0.
Download figure:
Standard image High-resolution imageWith the assistance of 3D printing techniques, other miniature surgical tools such as microstents and microcapsules are developed. In a recent work by Marco et al, an indirect 3D printing method based on sacrificial templates, which allow the fabrication of shape memory microstents with minimum features of 5 μm was proposed [198]. Functional polymers such as SMPs are infused into 3D micromolds printed by DLW method. After dissolving the micromolds, sophisticated 3D structures with functional materials are obtained. The indirect 3D printing approach can extend the material choices used to build 3D microstructures. For example, gelatin can be used directly to fabricate soft helical microstructure without the modification of gelatin into photopolymerizable GelMA, and 3D microstructures filled with magnetic particles can also be obtained, which remain challenges to conventional DLW printing. Zhang et al designed miniature capsules that can actively take and release liquid samples [15]. Such capsules are fabricated by the heterogeneous assembly of elastomer assisted with 3D printed microjigs. Under the stimulus of magnetic field, capsules can be transported to target position, carry liquid samples, and on-demand release samples, demonstrating great potential in biopsy.
4.5. Self-repairing
Self-repairing properties provide economic solutions to heal damages of soft miniature robots and actuators caused by overloads, cuts, and perforations. Roels et al used FFF printing to fabricate centimeter-scale self-healing grippers with thermoreversible DA networks [199]. Upon heating, the gripper can recover from large cuts and punctures. Yu et al developed an elastomer ink functionalized with thiol and disulfide groups which facilitate the photopolymerization and self-healing behavior of printed materials [151]. Pneumatic actuators and conductive devices are fabricated by microSLA and can heal after heating at 60 °C for hours (figure 11(a)). To build shape memory structures with self-repairing property, Zhang et al incorporated semicrystalline linear polymer polycaprolactone into shape memory polymer network (figure 11(b)) [200]. Small-scale gripper and stent are fabricated by the DLP printing of the self-healing SMPs. The printed structure demonstrates its geometric complexity and a healing efficiency larger than 90%, which promises benefits in extension of the lifespan of intelligent actuators.
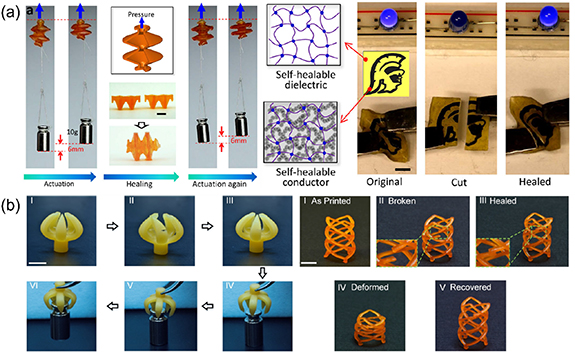
Figure 11. Self-repairing intelligent actuators obtained by 3D printing strategies. (a) Self-repairing elastomer actuator to lift a 10 g weight and self-healing elastomers based soft electronics to recover from cut damage Reproduced from [151]. CC BY 4.0. (b) DLP printing of millimeter-scale self-repairing gripper and cardiovascular stent used to grab a weight of 10 g and repair broken parts upon heat, respectively. Reprinted with permission from [200]. © 2019, American Chemical Society.
Download figure:
Standard image High-resolution image5. Conclusions and perspectives
This review focuses on recent progress in miniature machines fabricated by 3D printing techniques and their functions and applications. Representative 3D printing techniques and printable functional polymers are summarized. Their functions and applications in navigation and actuation, cargo manipulation, cell and drug delivery, minimally invasive surgery, and self-repairing are discussed. Three-dimensional printing techniques allow the integration of structure design and material functionality which brings great merit for the development of miniature machines. While impressive progress has been achieved in this field, further efforts are still required to enhance the function and intelligence of 3D printed machines aiming at elevating their capabilities (figure 12).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 12. Schematic illustration of future perspective of 3D printed miniature machines.
Download figure:
Standard image High-resolution image{kind=link}
Herein, the intelligent miniature machines are defined as controllable tiny devices that can learn and adapt to environment [201, 202]. To achieve the form of intelligence, several factors are important to the miniature machines, including perception, information storage and adaptivity. Perception functions enable the tiny robots and actuators to receive external input signal and realize environmental monitoring or self-monitoring. Information storage requires the memory capability of the machines, for instance, SMPs have the ability to exhibit controllable temporary or permanent deformation. Adaptive machines are capable of regulating their properties in response to changing environments, which can be achieved in individual or group level. For example, miniature robots with shape reconfigurable functions can squeeze through a narrow channel with a smaller size than the original robot body and robotic swarms with tunable collective behaviors can execute diverse coordinated tasks [120, 162].
The future focus on 3D printed miniature machines may be fourfold to improve their intelligence. First is the sensing capability. Conductive polymers with piezoresistive effect are capable of perceiving external loads through the variation of their resistances, such as the conductive hydrogel network composed of pNIPAM and polyaniline [203]. Chameleon inspired structural-color devices with regularly distributed colloidal crystals can present different colors in response to changes in environmental factors, e.g. pH or organic vapor [204]. To build miniature robots or actuators with sensing functions, multi-material printing techniques can be adopted to integrate sensing and actuation units. Another option is developing monolithic printable polymer that simultaneously occupy actuation and sensing abilities [203, 205].
Second is the development of miniature robots with embedded memory. The memory effects can be attributed to materials or structure design. From material perspective, diverse mechanisms have been unveiled to endow SMPs, LCPs, and hydrogels with dynamic memory exhibiting in temporary or permanent change of mechanical or optical properties [206, 207]. From structure perspective, bistable structures utilizing buckling instability are capable of storing information [208]. The structures with pre-strain field could undergo abrupt changes exhibiting a snap from one stable state to another stable state, which can be switched by magnetic field or mechanical forces [209]. Therefore, the memory function of 3D printed tiny machines is expected to be achieved by employing intelligent polymers with dynamic memory or adopting bistable and multistable structural design.
Third is the improvement of adaptivity of individual miniature machine based on multi-responsive materials. Miniature machines can demonstrate their adaptation to changing environments via shape change or tunable physical properties. One option is programming control inputs, e.g. magnetic fields generated by electromagnet systems, to induce the change of shape. By the programming control strategies, magnetic miniature robots have achieved multimodal locomotion, allowing them to adapt to different confined environments [11, 14]. Responsive materials, including stimuli-responsive shape-morphing materials and healing materials, provide another strategy to enhance the adaptivity of miniature machines. Stimuli-responsive shape-morphing materials are capable of actively changing their shape based on environmental cues. Multimaterial printing techniques have the potential to fabricate miniature devices that can respond to different stimuli, benefiting the realization of multi-physics control. In addition, miniature robots with dynamic self-healing properties remain to be investigated. For instance, miniature robots with reversible interfacial bonding promise benefit in achieving remotely controlled assembly and disassembly.
Fourth is the agent–agent interaction between multiple miniature machines. Three-dimensional printing techniques have great potential in mass customization. Collective behaviors have the potential to be emergent by driving multiple 3D printed tiny machines with controlled interactions between the adjacent agents, e.g. capillary forces and dipole–dipole interactions [33, 210]. Through control inputs and physical interactions between each agent, the group-level shape-morphing can be realized to enhance its adaptation to complex environments. It is anticipated that the integration of the physical interactions with responsive soft matter could aid in the development of miniature machines with more complex collective behaviors and adaptive capability, or even the swarm intelligence.
Acknowledgments
The research work is financially supported by the Hong Kong Research Grants Council with Project No. JLFS/E-402/18, the ITF Project with Project No. MRP/036/18X funded by the HKSAR Innovation and Technology Commission (ITC), the Croucher Foundation Grant with Ref. No. CAS20403, and the CUHK internal grants. L Z thanks the support from Multi-scale Medical Robotics Centre (MRC), InnoHK, at the Hong Kong Science Park, and the SIAT-CUHK Joint Laboratory of Robotics and Intelligent Systems. V I acknowledges funding from the European Union's Horizon 2020 research and innovation program under the Marie Sklodowska-Curie Grant Agreement No. 894425.
Data availability statement
All data that support the findings of this study are included within the article (and any supplementary files).
Conflict of interest
No competing financial interests exist.