
Abstract
Bioinspired flapping–wing micro aerial vehicles (FWMAVs) have emerged over the last two decades as a promising new type of robot. Their high thrust-to-weight ratio, versatility, safety, and maneuverability, especially at small scales, could make them more suitable than fixed-wing and multi-rotor vehicles for various applications, especially in cluttered, confined environments and in close proximity to humans, flora, and fauna. Unlike natural flyers, however, most FWMAVs currently have limited take-off and landing capabilities. Natural flyers are able to take off and land effortlessly from a wide variety of surfaces and in complex environments. Mimicking such capabilities on flapping-wing robots would considerably enhance their practical usage. This review presents an overview of take-off and landing techniques for FWMAVs, covering different approaches and mechanism designs, as well as dynamics and control aspects. The special case of perching is also included. As well as discussing solutions investigated for FWMAVs specifically, we also present solutions that have been developed for different types of robots but may be applicable to flapping-wing ones. Different approaches are compared and their suitability for different applications and types of robots is assessed. Moreover, research and technology gaps are identified, and promising future work directions are identified.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 4.0 license. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
Humans have been fascinated by insect and bird flight for centuries. Natural fliers exhibit remarkable capabilities and features that, so far, man-made aerial vehicles have been unable to fully emulate, such as rapid maneuvering ability, adaptability to diverse and challenging environments, and high efficiency at very small scales. These properties have inspired scientists to study natural fliers and develop bioinspired flapping–wing micro aerial vehicles (FWMAVs) that resemble natural fliers and share some of their advantageous flight properties. While FWMAV development presents numerous challenges, from the inherent complexity of the flight physics and unsteady aerodynamics to the small scales typically involved, significant progress has been made in this field over the past few years.
FWMAVs have many advantages over conventional aerial vehicles, including high maneuverability, versatility, safety, and low noise. Their soft and flexible wings, lightweight structures, and propeller-free propulsion make them safe to operate and unlikely to cause damage. Thanks to these properties, FWMAVs are highly promising for applications involving flight in highly cluttered environments, indoors, near humans, flora and fauna, and near critical infrastructure. However, there are still challenges to be addressed before such robots can be used in practice, and particularly their endurance, robustness, and autonomy need to be improved. This explains why studies showcasing real-world applications of FWMAVs are so scarce. This review addresses two frequent and significant limitations of FWMAVs, i.e. limited endurance and lack of take-off and landing capabilities. Most existing FWMAVs are hand-launched, and are caught again by hand upon completing their mission [1]. This hinders their usage for complex missions in challenging environments, even though they are inherently suited for such missions.
Research on take-off and landing (and perching) of FWMAVs is gaining more traction as these robots become more advanced and robust. In recent years, a number of studies have been conducted on FWMAV take-off and especially perching and landing (cf following sections). This research builds on earlier work on natural fliers and on multirotors. Perching research, for instance, originally emerged for multirotors, with the aim of extending their limited endurance and improving their versatility. Researchers have also extensively studied the take-off and landing capabilities of natural fliers, [2, 3], and applied similar concepts on man-made aerial vehicles, [4, 5]. Developing take-off and landing/perching mechanisms for FWMAVs can enhance their use in practical applications by compensating for the limited endurance provided by lightweight batteries, enabling them to land on various structures in their environment, and allowing for repeated autonomous take-off and landing sequences within a single mission.
This paper presents an overview of research on FWMAV take-off and landing approaches, and discusses the essential requirements and challenges involved in achieving these two types of maneuvers. Technological advances that may facilitate successful take-off and landing are also discussed and research gaps are identified. Take-off and landing approaches that are used in other types of robots or in natural flyers, but may be applicable to FWMAVs, are also presented. The rest of this paper is structured as follows. Section 2 briefly introduces flapping-wing flight and FWMAVs, focusing on the aspects most relevant for take-off and landing and highlighting the importance of these two flight maneuvers. An overview of existing review studies is also provided, clarifying how the current study expands on the available resources. Sections 3 and 4 discuss existing work on FWMAV take-off and landing, respectively, covering different approaches and mechanisms used both in nature and in robots, and how the existing designs may be further enhanced. Potentially promising new approaches are also proposed, including methods currently used on different types of robots. Section 5 presents our conclusions and formulates recommendations on further work required in this area of research.
2. Flapping wing fliers
This section introduces the basic flight properties of natural fliers and their landing and take-off methods. FWMAVs are then introduced, and the scope of this review is clarified in the context of existing reviews. A brief overview of the current state of the art in flapping-wing take-off and landing approaches concludes the section.
2.1. Natural fliers
Researchers have long been trying to understand bird and insect flight and how this type of flight can be achieved with man-made flyers. Birds and insects rely on their wings to generate lift and thrust. A typical flight sequence includes take-off, cruise flight (potentially including loiter, catching prey, etc), and landing, as shown in figure 1. However, there are several differences between bird and insect flight. Due to their larger wingspan and surface area, birds can fly at a lower wing-beat frequency. Unlike insects, they also possess the ability to glide without flapping their wings. Birds generally have lower flapping amplitude and generate lift mainly during the downstroke of the wings. By contrast, insects have a higher flapping amplitude and frequency, more horizontal stroke planes, and can generate lift during both upstroke and downstroke. Insects rely more on unsteady aerodynamics and are generally unstable due to the lack of a tail, making their actuation and control more complex. Most flying insects and some birds, e.g. the hummingbird, can also hover.

Figure 1. Example flight sequence of a bird. Reprinted from [6], Copyright (2016), with permission from Elsevier Masson SAS. All rights reserved.
Download figure:
Standard image High-resolution imageUnderstanding an aerial robot's underlying flight physics is essential for developing appropriate take-off and landing approaches, as different flight properties imply different requirements, opportunities, and limitations. A vast amount of research has been published on avian flight; some examples are discussed later in this section. Ostrom [7] discussed bird flight and the history and evolution of flight up to the present times. Ellington [8] has discussed aerodynamics for hovering insects. A discussion on types of bird flight, wing shapes, and flight maneuvers was provided by Dhawan [9]. Ellington [10] discussed the limitations of animal flight, which also attempts to explain why larger animals or birds cannot attain flight. A further study discussed insect flight and how it differs from conventional flight [11]. A strong leading-edge vortex in conjunction with a dynamic stall was found to be responsible for the high lift forces present in insect flight. The enhanced aerodynamic performance shown by insects was discussed by Dickinson et al [12], which noted that the major contributors to this enhanced aerodynamic performance are delayed stall, wake capture, and rotational circulation. Tobalske [13] discussed the biomechanics of bird flight, primarily focusing on maneuvering and stability. More recently, Dvořák [14] studied the aerodynamics involved in bird flight. Like insects and birds, mammals such as bats also can fly [15]. Berg and Biewener [16] discussed the kinematics during a pigeon's take-off and landing flight. An artificial platform at the scale of a fore-wing is modeled, and lift performance was experimentally noted [17]. For heavier birds, flapping flight is considered costly. A study on Andean Condors [18], for instance, found that these birds flap their wings for only one percent of their total flight time. More review papers on this topic are mentioned in section 2.5.
2.2. Flapping wing MAVs
FWMAVs are bioinspired micro aerial vehicles (MAVs) that have emerged over the past two decades and draw inspiration from birds and insects. FWMAVs are advantageous owing to their high thrust-to-weight ratio, agility, and maneuverability. They are safer, lighter, and less noisy than similarly sized multi-rotor MAVs while retaining the key advantages of hover-capability, high maneuverability, and efficiency at small scales. They are generally highly suitable for miniaturization. These qualities make FWMAVs particularly suited for flight indoors, in highly cluttered environments, near humans, flora and fauna, and near critical infrastructure. Therefore FWMAVs are promising for various applications, and extensive research is being conducted on such vehicles. Existing studies on FWMAVs have focused extensively on design, aerodynamics, stability, and control aspects. Studies showcasing real-world applications of such vehicles, however, remain scarce.
2.3. Types of FWMAVs
FWMAVs differ widely, but can be classified according to the following broad categories:
- Bird-Like FWMAVs
- Insect-Like FWMAVs
- Hybrid FWMAVs
Each category has distinct features, which are briefly discussed in the following subsections and summarized in table 1. Note that not all vehicles possess each property mentioned in the table. In particular, several FWMAVs (e.g. [19, 20]) share properties with both birds and insects, and are therefore considered hybrid.
Table 1. Comparison between Bird and Insect-like FWMAVs.
| Bird-Like FWMAVs | Insect-Like FWMAVs |
|---|---|
| More similar to fixed-wing UAVs | More similar to multirotor UAVs |
| Usually stable | Unstable |
| Only forward flight | Can move in all six directions |
| Complex take-off and landing | Somewhat simpler take-off and landing |
| Generally hand-launched and caught | Generally VTOL-capable |
| Heavier | Lightweight |
| Less agile | More agile |
| Able to glide | Generally unable to glide |
| Unable to hover | Able to hover |
| Also use tail for actuation | Use only wings for actuation |
2.3.1. Bird-like FWMAV
In general, bird-like FWMAVs (e.g. [4, 21–23]) are stable in flight thanks to their tailplane. Consequently, they are easier to control, and their behavior is somewhat similar to that of fixed-wing aircraft. Bird-like vehicles also typically involve simpler actuation mechanisms since the tailplane can be used for actuation, as on fixed-wing aircraft. This implies that the wing actuation can be very simple, with the wings only being used for lift generation and not maneuvering. Bird-like FWMAVs possess the ability to glide as well as sustain flight via wing-flapping, thus achieving a higher efficiency. They are usually larger, easier to manufacture, and able to carry higher payloads. However, only forward flight is possible as bird-like FWMAVs cannot hover or perform vertical take-off and landing (VTOL). In nature, birds typically use a jumping maneuver to take off from the ground and transition into a glide when taking off from elevated positions such as tree branches [3]. For landing on non-planar surfaces, they use a perching/grasping mechanism to attach to the landing structure, e.g. a branch [24]. To attain a sufficiently low, safe velocity for landing, birds need to perform specific approach maneuvers, which often require accurate control. These take-off and landing mechanisms are further discussed in detail in sections 3 and 4.
2.3.2. Insect-like FWMAV
Insect-like aerial vehicles (e.g. [25–27]), are generally unstable and possess some of the abilities of multi-rotor configurations, such as hovering and performing VTOL. The two aforementioned capabilities imply that insect-like FWMAVs require only a simple un-actuated landing gear for take-off and landing on planar surfaces and can rely on relatively simple landing mechanisms. However, landing on and taking off from a perched position often poses a challenge for these vehicles. Insect-like FWMAVs also have more degrees of freedom in flight and can generally move easily in all six directions. They are, however, more challenging to fly and control, and typically much smaller and lighter, which also implies practical challenges. In nature, insects are very light compared to birds and can entirely rely on the lift generated by their wings for take-off. They typically all use their limbs to attach to the surface for landing, which is further discussed in the following sections. Thanks to their very low weight, insects can sometimes avoid precise landing control altogether and instead impact landing objects at relatively high velocities and absorb the resulting impact forces [28].
2.4. Hybrid FWMAVs
As their name suggests, hybrids FWMAVs (e.g. [29, 30]) share properties of both bird-like and insect-like FWMAVs. Early research on FWMAVs often focused on hybrid vehicles [19, 20, 31] since they typically have a tailplane, allowing for stable flight and simple actuation. At the same time, they share some properties of insects, such as hover capability and wing-based lift generation, thus allowing for further research on insect flight mechanisms without involving all the challenges.
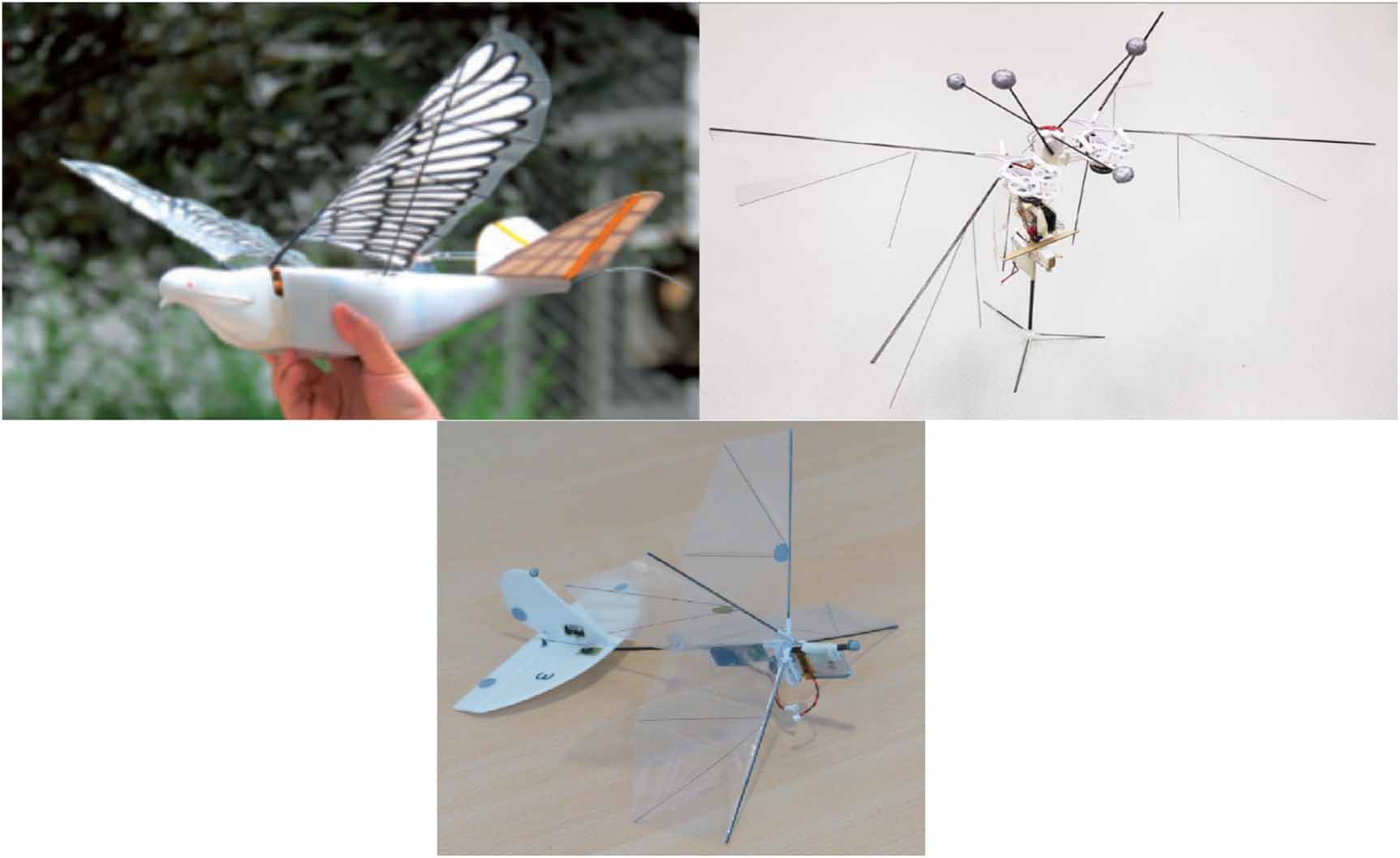
An example of bird-inspired, insect-inspired and hybrid designs can be seen in figure 2.
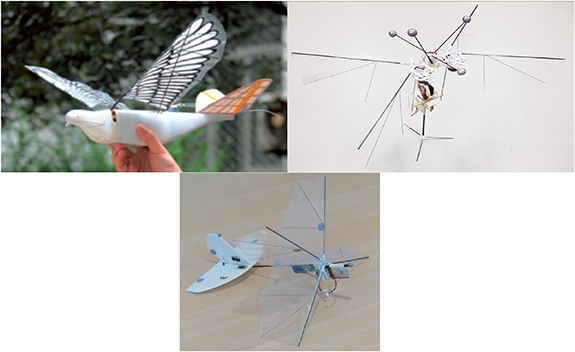
Figure 2. Examples of bird-like flapping wing (left) Reproduced from [21]. CC BY 4.0., Insect-like flapping wing (right) Reproduced from [32]. © IOP Publishing Ltd. All rights reserved, and Hybrid design (bottom). Reproduced from [29]. © IOP Publishing Ltd. All rights reserved.
Download figure:
Standard image High-resolution image2.5. Previous reviews on FWMAVs
Numerous review articles on natural flyers and bioinspired aerial vehicles have been compiled over the past two decades. This section provides an overview of key review articles relevant to our study, either directly or as background reading. Brown [33] discussed the flight of birds. A review of the fluid dynamics of insect flight was conducted by Maxworthy [34]. A review on FWMAVs and their use has been discussed by Shy et al [35]. The evolution of insect-inspired MAVs is discussed in several review papers, e.g. [36–38]. Progress on hover-capable, tailless, insect-like FWMAVs has for instance been reviewed by Phan et al [39, 40] and by Xiao et al [41]. Chen et al [42] conducted a review on the design and fabrication of bioinspired aerial vehicles. Haider et al [43] has surveyed the literature pertaining to progress in FWMAV applications. Sane [44] contains a detailed review of the aerodynamics of insect flight and how both aerodynamic modeling and our understanding of biological flight have improved. Chin et al [45] discussed the aerodynamic mechanisms involved in flapping-wing flight. Aerodynamic modeling for flapping insects was covered by Abdul et al [46]. Reviews on the flapping wing micro aerial vehicle's dynamics, stability, and control aspects have been conducted by Orlowski and Girard [47] and Taha et al [48]. Khan and Akmeliawati [49] conducted a review of system identification techniques and mathematical modeling. A summary of the previous reviews is given in table 2.
Table 2. Summary of Previous Review Papers on FWMAVs.
| Author | Key aspects |
|---|---|
| Shyy et al [35] | Flapping and flexible wings in MAVs |
| Sane [44] | Aerodynamic modeling |
| Knowles et al [36] | Evolution of insect-inspired MAVs |
| Orlowski and Girard [47] | Dynamics, stability and control of FWMAVs |
| Chin and Lentink [45] | Aerodynamics of flapping wing |
| Phan and Park [39] | Tail-less insect-inspired FWMAVs |
| Chen and Zhang [42] | Design and fabrication |
| Haider et al [43] | FWMAVs progress and application |
| Khan and Akmeliawati [49] | System identification & mathematical modeling |
| Xiao et al [41] | Hover capable FWMAVs |
| Meng et al [50] | Perching and grasping MAVs |
| Abdul Hamid and Filippone [46] | Aerodynamic modeling for flapping insects |
| Wang et al [38] | Ultra lightweight flapping wing vehicles |
2.6. Current take-off and landing capabilities for FWMAVs
Existing reviews have been conducted on bioinspired aerial vehicles' design, aerodynamics, control, stability, and other aspects. However, landing and take-off for FWMAVs still need to be extensively addressed. Landing and take-off capabilities are vital for fully-functioning bioinspired aerial vehicles and indispensable for any real-world application. A lack of such capabilities has restricted the use of FWMAVs. The frequent lack of such capabilities is due to the fact that take-off and landing are often challenging to achieve and may require dedicated mechanisms and accurate maneuvering and control. Bird-like aerial vehicles, in particular, cannot hover and thus require complex maneuvers to land safely. Taking off from a tree branch or planar surface is also a challenge that needs to be addressed since it poses additional mechanical, control, and stability requirements for the mechanism. For insect-like vehicles, the weight and structural limitations restrict conventional design and material use. Therefore incorporating a landing mechanism at such a small scale becomes challenging. Additional limitations are connected to the development of take-off and landing mechanisms. Current approaches presented in the literature allow for landing on specific types of surfaces, typically on circular/cylindrical or planar surfaces, thus requiring a different mechanism for each particular application.
This article provides a comprehensive overview and evaluation of landing and take-off approaches for bioinspired FWMAVs, i.e. covering existing mechanisms, flight maneuvers, dynamics, and control aspects. In addition to the techniques proposed in the FWMAV literature to date, we discuss promising approaches for achieving FWMAV take-off and landing that have not yet been used for such purposes. These, for instance, include solutions applied to different types of robots. Based on the presented literature survey, we provide recommendations on what different methods are more appropriate for FWMAVs and suggest new methods that may be used in future research.
3. FWMAV take-off
As explained in the previous section, taking off from a structure is challenging for FWMAVs. This section will discuss the take-off phase in detail, starting from the requirements for a successful FWMAV take-off (section 3.1) and the challenges the maneuver poses, all the way to the solutions proposed by researchers to date. We discuss how the available literature may help us to understand take-off maneuvers better and to propose solutions inspired both by biology and by existing research on other types of MAVs. Take-off of both natural and robotic flyers is discussed. After existing examples of FWMAV take-off are presented (section 3.2), we formulate suggestions for further improvements and propose solutions that may be applied to FWMAV. A comparison of all the discussed methods is also undertaken in section 3.3.
3.1. Requirements for take-off
The complex requirements for a successful take-off make it challenging to achieve with current technology. The aerodynamic requirements state that a FWMAV should not only be able to generate enough lift for successful take-off but also demonstrate sustained flight afterward. Moreover, the mechanism must not only provide take-off capability but also be lightweight and not affect the general flight performance of the vehicle. Such a mechanism should also provide an initial acceleration to the vehicle, especially those not exhibiting hover capability, from where the flapping sequence may take over and generate lift for sustained flight. The mechanism should be robust, adaptable, and resilient, provide enough ground clearance, be easy to control the actuation process, and not adversely affect the vehicle's stability for complex landing and take-off maneuvers. The mechanism should structurally sustain the impact and aerodynamic forces acting on it during landing, take-off, and flight. Requirements also vary depending on the type of vehicle considered (as discussed in section 3.2) and the kind of surface it is taking off from. For example, in the case of an inclined surface, the vehicle has to adhere to the surface, whereas such ability is not required for take-off from a horizontal surface. Also, the structure's shape plays an important role. For example, it is harder to control take-off while perched on a cylindrical structure like a tree branch, a pipe, or a cable than taking off from a planar structure. Flight dynamics and control aspect also varies depending on the type of maneuver required for take-off. While taking off from a branch, an aggressive and stable maneuver is required to attain successful take-off, whereas taking off from the ground is less challenging to control. On the other hand, while taking off from a branch at a certain height, the vehicle can first fall for a distance and then recover, whereas, for ground take-off, the flight must be sustained immediately afterward. The available space can also pose an additional challenge, like taking off from a wide-open surface in spacious surroundings is more straightforward, while a shorter take-off sequence would be required in a cluttered space. Taking off from an inclined surface can further impose complexity.
These requirements for flapping wing take-off vary from fixed and rotary wing vehicles. A multi-rotor vehicle, for example, can quickly take off from confined spaces, and the lift generated depends on rotor RPM. There is no requirement for a runway due to the VTOL capability of these vehicles, and the challenge is control and stability. A fixed-wing aircraft depends on wing design and the forward velocity for lift generation. On the other hand, insects use the clap and fling method for lift, depending on the flapping frequency. Birds also rely on their wings for lift and depend on wing morphology, forward flight velocity, and flapping frequency. Insects, owing to their low weight, rely more on the lift generated by wings and demonstrate a complex take-off sequence as noted by Dickinson et al [12] and Ellington et al [11]. On the other hand, birds show a simpler take-off sequence, as mentioned by Earls [51], and rely on their limbs more for take-off rather than solely on the lift generated by their wings. While perching on tree branches etc a bird often glides first and then starts to flap their wings for flight. This makes take-off difficult to achieve, especially for bird-like MAVs that can only fly straight and do not possess VTOL capability. Different birds use different techniques for take-off, depending on the surface they are taking off from. In his study, Parslew et al [52] looked at avian jumping take-off. It was observed by Heppner and Anderson [53] and Provini et al [2] that more than 90% of the take-off acceleration can be generated by jumping maneuver in some birds for example, Zebra Finch (Taeniopygia guttata), Diamond Dove (Geopelia cuneata) and European Starling (Sturnus vulgaris) etc. Running is also a method used by birds for take-off, for example, Quail (Coturnix) [3].
Mimicking these behaviors with FWMAVs poses a challenge for current technology. So, further investigation is necessary to achieve such behaviors and thus fully exploit the advantages of FWMAVs. Meeting the requirements mentioned above is particularly challenging by the complex dynamics and weight restrictions of FWMAVs. Adding extra structural components, such as a take-off mechanism, also changes the system's overall structure and can pose stability and control challenges. The small scale of FWMAVs and geometric restrictions demand that the overall take-off and landing mechanism, when installed on the vehicle, does not introduce further stability and control issues and is as lightweight as possible. Material selection is vital to meet these stringent criteria, and the overall configuration should be weight-optimized.
3.2. Existing take-off techniques
In nature, birds and insects use different methods to achieve take-off. These methods may further be categorized into four, namely:
- Jumping
- Running
- Gliding
- VTOL
Scientists have studied these methods individually and tried to adapt some for FWMAVs. Gliding and VTOL, in particular, have been extensively studied for fixed-wing and multi-rotor vehicles. Each listed take-off method and application examples are further explained in the subsequent sections.
3.2.1. Jumping
Jumping is a common method used by birds to take off. Jumping can be characterized as pushing the body against a surface and accelerating it to leap from the surface. Humans use jumping to avoid obstacles, frogs use it as a general technique for locomotion, and some birds utilize it as a take-off method. Jumping is an effective way to achieve high speed quickly and provides an upward force and a forward velocity. Elastic potential energy is stored, which is later released to generate force. The legs are responsible for providing the initial acceleration. Jumping is not only restricted to birds. Some insects, like the flies (Hydrophorus alboflorens) and leafhoppers (Cicadellidae), also use this mechanism to fly off various surfaces [54]. An example of jumping take-off for birds can be seen in figure 3. Two types of Starling birds were observed, and it was noted that they produce 80%–90% of their initial thrust (take-off velocity) using their limbs [51]. To achieve the required take-off velocity, two different take-off methods were observed, i.e. a counter-movement jump and a squat jump. However, in order to achieve this type of take-off sequence for an FWMAV, additional weight would need to be added, and thus normal flapping flight becomes difficult. The strict take-off requirements and weight constraints make it challenging to develop a mechanism to achieve the desired jumping height and forward acceleration required for successful take-off and transition to flight by wing-flapping.
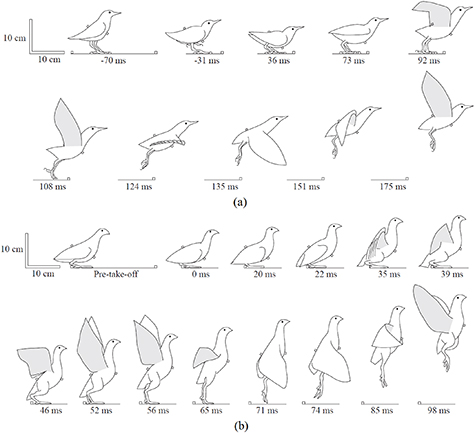
Figure 3. Jumping aided take-off where (a) depict counter moment jump and (b) demonstrates squat jump. Reproduced with permission from [51]. © 2000 by Company of Biologists.
Download figure:
Standard image High-resolution imageJump stability is also an issue faced by engineers when adapting bioinspired jumping mechanisms for robots. During the jumping phase, robots are typically unstable since they do not have any control over their orientation [55]. Consequently, robots may start rotating during the jump, which could lead to problems during a take-off maneuver. It is also possible that an excessive jumping force, especially when starting from an inclined surface, may topple the robot altogether. If the force is inadequate, by contrast, the vehicle will start flapping but not be able to sustain itself. It may land again in an uncontrolled way, potentially incurring structural damage. Therefore, a stable mechanism is required to ensure that the take-off is achieved successfully or that the vehicle can land safely in case of a failed take-off. A review on jump stability for insect-inspired robots has been compiled by Ribak [55] and proposed a pre-jump positioning of the vehicles' center of mass with respect to the jumping limbs to control the jumping trajectory. During the jumping phase, having a tail can enhance the stability of the FWMAV. Flapping the wings during the jump is also a method to control and stabilize the vehicle [56]. However, this will add further complexity and increase the drag during the jump. Therefore, initiating wing flapping may be more effective once maximum height is reached.
For FWMAVs, the jumping maneuver is an effective way to achieve take-off. However, the demonstration has been restricted to simulation work due to weight constraints and landing difficulties. Zhang et al [57] proposed a conceptual design for a jumping FWMAV as seen in figure 4(left). The designed model was able to achieve an upward force of 2.3 times the weight of the vehicle. Hudson et al [58] simulated a jumping mechanism to initiate the flight for a flapping wing vehicle as seen in figure 4(right). It was proposed that, for a 33.3 g vehicle, a 50∘ initial inclination is required and a velocity of 10 m s−1 to achieve steady flight. The model was further improved to account for simulated autonomous flight [59]. This improved model, shown in figure 4(bottom), weighted 1.314 N with an initial angle of 64∘ and 2 m s−1 initial speed. A four-bar jumping mechanism at an angle was simulated. Sivalingam [60] presented a jumping legs model for FWMAV. The proposed simulation-based model was 500 g, of which the leg mechanism took up 10%. In the studied example, the required take-off velocity for the successful flight was 3 m s−1 and an inclination of 52∘. The take-off velocities and inclination angles discussed above vary in each case and, thus, cannot be generalized for an FWMAV; however, they provide a reasonable starting estimate. The initial speed and inclination angle variation also signifies that these characteristics depend on design parameters. An essential factor to consider is the upward force and forward velocity required to attain sustained flight afterward by flapping the wings. This consideration significantly affects the vehicle's desired inclination angle and forward velocity. The work done for jumping take-off for FWMAV has mainly been focused on the simulation phase, and experimental work still needs to be explored. Although feasible for simulation, the design may incur challenges during the experimental phase. Such challenges include the stability of these mechanisms and how the vehicle will behave during the jump phase, how much lift it will generate after a successful jump, and how quickly it can achieve the desired take-off velocity. Drag force due to wing upstroke during jumping mode will also decrease the overall system's efficiency. Therefore, the exact timing to start actuating the wings will also play a significant role. Generating that amount of force at this scale will also be challenging. These constraints and possible solutions must be considered when moving toward the experimental stage.
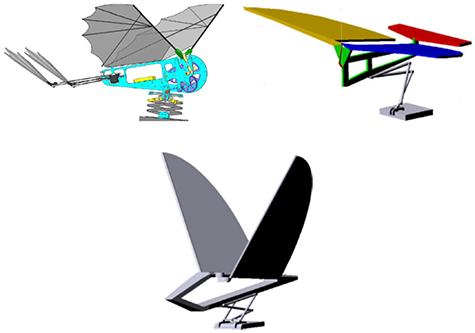
Figure 4. FWMAVs Jumping Take-off Examples (left) © 2017 IEEE. Reprinted, with permission, from [57](right) © 2018 IEEE. Reprinted, with permission, from [58] and (bottom) Reproduced from [59], with permission from Springer Nature.
Download figure:
Standard image High-resolution imageResearchers have also explored jumping for other types of robots as seen in figure 5, and the proposed concepts can also be considered for flapping-wing aerial vehicle applications. Some of these works have been mentioned in this section. Jumping robots have been studied extensively, and an understanding of their mechanism and application can be obtained from several reviews, e.g. [61, 62]. These recent reviews highlight the importance, challenges, and possible applications of these jumping robots. Not all mechanisms, however, may be deemed suitable for an FWMAV application; therefore, only some of those are discussed.

Figure 5. Jumping Robots (left) © 2017 IEEE. Reprinted, with permission, from [69] and (right). Reproduced from [56]. © IOP Publishing Ltd. All rights reserved.
Download figure:
Standard image High-resolution imageAn SMA-actuated jumping robot was developed by Ho and Lee [63] weighing 17 g and demonstrated a jumping height that was 1.3 times its diameter which was 13 cm. A jumping-crawling robot was designed by Jung et al [64] for a robot that can jump up to 2.90 m in height with a velocity of 7.71 m s−1. The robot's weight was 59.4 g, much less than commercially available FWMAVs; however, the novel approach with high energy storing capability provides an excellent base to study the jumping mechanism. Jung et al [65] further developed another model capable of 1.5 m jumping height with a forward jumping distance of 0.8 m. For heavier robots weighing 0.4 kg, a jumping model was developed by Klemm et al [66] that can jump up to 0.4 m. A locust-inspired jumping robot was designed by Zaitsev et al [67] that weighs 25 g and can jump over 3.5 m however, it used to rotate and land uncontrollably. Beck et al [68] improved on that design by introducing jump stabilization and landing control. The upgraded robot still reached a height of 1.7 m. For extreme jumping locomotion, Haldane et al [69] proposed a model that can experience acceleration up to 14 times that of earth's gravity. Truong et al [56] performed experiments with a 23 g robot capable of jumping up to 0.9 m. A robot of 105 g weight showing a jumping height of 0.8 m was developed by Chae et al [70]. The designs mentioned above are not developed for FWMAV take-off. However, they may be modified and studied further for an application in FWMAV jumping take-off. A summary of these designs is given in table 3.
Table 3. Jumping Models that may be suitable for FWMAVs.
| Article | Key Characteristics | figure |
|---|---|---|
| Ho and Lee [63] |
|
 Reproduced from [63]. CC BY 3.0. Reproduced from [63]. CC BY 3.0.
|
| Jung et al [64] |
|
 © 2016 IEEE. Reprinted, with permission, from [64]. © 2016 IEEE. Reprinted, with permission, from [64].
|
| Klemm et al [66] |
|
 © 2019 IEEE. Reprinted, with permission, from [66]. © 2019 IEEE. Reprinted, with permission, from [66].
|
| Jung et al [65] |
|
 © 2019 IEEE. Reprinted, with permission, from [65]. © 2019 IEEE. Reprinted, with permission, from [65].
|
| Troung (2019) [56] |
|
 Reproduced from [56]. © IOP Publishing Ltd. All rights reserved. Reproduced from [56]. © IOP Publishing Ltd. All rights reserved.
|
| Chae et al [70] |
|
 © 2022 IEEE. Reprinted, with permission, from [70]. © 2022 IEEE. Reprinted, with permission, from [70].
|
3.2.2. Running
Another way to achieve take-off in birds is by providing initial acceleration through running and wing flapping [3]. Initial acceleration is provided by coordinated leg movement. After a certain velocity, known as take-off velocity, is achieved, a sufficient lift is generated, which allows for take-off by flapping the wings. This is similar to how fixed-wing aerial vehicles take off by reaching take-off velocity on the ground using the thrust generated by the engines and then taking off. Due to an additional locomotion and taxiing requirement, surface roughness and inclination can affect this method. Also, a runway or enough ground space is required for running. This additional locomotion will also require more power, further complicating the system. Several researchers have worked on this method to achieve take-off for flapping wing aerial vehicles. A bioinspired aerial vehicle that can be airborne and also possesses ground locomotion capability was developed by Bachmann et al [71]. An FWMAV named BOLT (shown in figure 6) was designed [5], that was capable of both flight and terrestrial locomotion. For locomotion, both legs and wheels were installed on the robot and separate experiments with both were performed. Kim et al [72] also experimented on a vehicle with similar capabilities that uses wheels to taxi on the ground.

Figure 6. BOLT: capable of both aerial and terrestrial locomotion © 2011 IEEE. Reprinted, with permission, from [5].
Download figure:
Standard image High-resolution imageThere have been other flying robots developed by researchers possessing ground locomotion capabilities [73–76]. However, due to the restrictions mentioned earlier, the application of running assisted take-off for bioinspired flapping-wing aerial vehicles becomes challenging. The requirement of additional space and a mechanism for locomotion restricts the usage in circumstances where there are confined areas or a need to take off from a tree branch or a perched position. This mechanism, however, is relatively simpler and less control and stability challenges; therefore, it may be applied to vehicles where ground take-off and landing are feasible with adequate space.
3.2.3. Gliding
Gliding is an ability that is most widely used by birds in nature. During glide, birds do not flap their wings. They are already at a certain altitude and they convert their potential energy into kinetic energy thus, by reducing altitude, they gain forward velocity. Fixed-wing UAVs and other larger aircraft also possess this ability and is most useful in case of an engine failure and emergency landing. Birds glide when cruising through the air, enabling them to cover more considerable distances without constantly flapping their wings, therefore conserving energy. Gliding is mainly used as a take-off strategy when taking off from perches, e.g. tree branches, etc. Birds use gliding to cover some distance until too much height is lost, and flapping is needed again to generate thrust. However, this is only possible from an elevated surface. Thus, its application for take-off is restricted.
Gliding in nature has been studied by researchers to understand its associated performance parameters and help improve manned aerial vehicles. Examples of study conducted on glide performance of birds include [77–80]. Gliding is an integral part of fixed and flapping-wing aerial vehicles. Just like in birds, it assists in take-off from elevated positions and helps attain increased range. A jumping-gliding model was developed by Desbiens et al [81] to show that gliding capability increases the jumping distance of a jumping robot. A model was developed by Martin et al [82] to observe gliding and flapping flight performance. It was noted that control aspects need to be studied further. The control and stability for a gliding capable bioinspired aerial vehicle have also been studied [83–85]. Flight dynamics and battery utilization for a vehicle capable of flapping and gliding was modeled by Johnson et al [86]. Sanchez et al [87] developed a simplified dynamic model for a bioinspired aerial vehicle. Further examples can be found in a detailed review on aerodynamic efficiency for gliding birds as well as similar UAVs [88].
3.2.4. VTOL
In bioinspired vehicles, VTOL has been, by far, the most widespread take-off approach. In nature, hummingbirds and most insects possess VTOL capabilities and thus can take off directly from a surface. Most birds are not VTOL-capable, as they have to reach a certain velocity before their wings generate sufficient lift for take-off. Therefore VTOL approaches are mainly suitable for insect-like FWMAVs. This is due to the way aerodynamic forces are produced in birds and insects. Birds rely more heavily on quasi-steady circulation-based force production, which requires forward velocity to generate lift, while insects rely more on unsteady forces produced by rapid flapping of their wings. VTOL is a convenient way to take-off and land in confined spaces, especially where horizontal space or ground space are limited. For analogous reasons, VTOL is also ideally suited for take-off and landing from a perched position, however it can be challenging to control take-off from perches. VTOL-capable, tailless, insect-like FWMAVs have no passive stability, hence they are more complex to control and require active wing-based control to maintain stability during vertical take-off and landing maneuvers. Examples of insect-like and hybrid FWMAVs capable of VTOL for instance, include [25, 29]. A dragon-fly like vehicle [89–91], the nano-hummingbird [19] developed by AeroVironment, Inc. COLIBRI [92], the KUBeetle-S [26] & the RoboBee [27]. Some of the mentioned examples can be seen in figure 7.
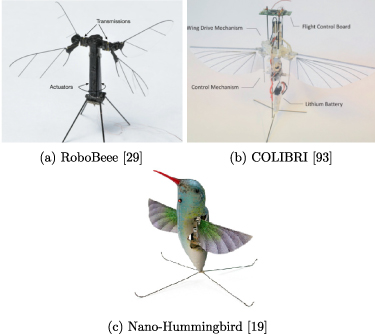
Figure 7. Examples of VTOL-capable insect-like FWMAVs. Reproduced from [27], with permission from Springer Nature. From [93]. Reprinted by permission of the American Institute of Aeronautics and Astronautics, Inc. From [19]. Reprinted by permission of the American Institute of Aeronautics and Astronautics, Inc.
Download figure:
Standard image High-resolution imageAn attempt to enable a bird-like FWMAV to perform VTOL was proposed by Ma et al [4]. Their platform combined four rotors, similar to a quadrotor configuration, to achieve successful VTOL capability (shown in figure 8). A drawback of bird-like FWMAVs possessing VTOL capability is the maximum take-off weight. They cannot carry large additional payloads and if a bigger vehicle was designed, it would require larger motors to actuate the wings and this will decrease the overall efficiency of the system. Therefore, this restricts the use of these vehicles only to lightweight applications.

Figure 8. Examples of VTOL capable bird-like aerial vehicles. Reproduced from [4], with permission from Springer Nature.
Download figure:
Standard image High-resolution image3.3. Comparison between take-off mechanisms
Various examples of take-off mechanisms of FWMAVs are discussed in section 3.2. Each type has distinct advantages and disadvantages. For insect-inspired, tail-less configurations, VTOL is the most suitable method for take-off since it is design-dependent and is lighter than other mechanisms. Also, for tail-less configuration, the forward flight would be difficult to control, especially during take-off. The stability of such an approach is still something that needs to be addressed and improved further. Running assisted take-off is easier to achieve. However, due to the added requirements for a runway, its application for FWMAVs still needs to be expanded, and therefore, this method can only be used where space is not an issue. Gliding is an essential part of all aerial vehicles, especially those that are like birds. Combined with perching capability, gliding take-off can enhance the applications of these vehicles and improve their capacity to take off from elevated surfaces. Jumping is the most promising take-off mechanism for a bird-like aerial vehicle. It not only provides the ability to take off from a plane surface but also from branches etc when combined with perching. Unlike a running-based take-off, it does not require a larger space for take-off or a runway, and further study and improvement in this method can no doubt enhance the possibilities of FWMAV applications. Table 4 gives a brief comparison between these methods.
Table 4. Take-off Methods.
| Method | Key Characteristics | Advantages | Challenges | FWMAV Examples |
|---|---|---|---|---|
| Jumping |
|
|
| |
| Running |
|
|
| |
| Gliding |
|
|
| |
| VTOL |
|
|
|
Some of these methods can also be combined. For example, the jumping method can be combined with gliding, hence ground take-off can be done by jumping and from a perch, the vehicle can use a glide approach. Similarly running and jumping may be combined therefore, a shorter runway may be required, however, controlling the jumping maneuver will indeed become quite challenging with a forward velocity. There is a certain trade-off that also needs to be addressed. Developing a more robust and adaptable take-off mechanism requires more control and will also impose additional weight on the vehicle. Lightweight and relatively simpler approaches will decrease the complexity of the take-off manoeuvre, however, the payoff would be in terms of robustness. The control of each method also plays an important role as well. Jumping for example can be applied to most FWMAVs and will provide a take-off from different surfaces, however, it is heavier and complex, and the control and stability aspect of such an approach is also challenging and must be addressed. VTOL approach is lighter however unstable and thus requires active control. Running is a stable approach and relatively lighter in weight. Gliding requires a controlled manoeuvre to achieve sustained flight afterwards and hence makes the control aspect challenging. While choosing an appropriate take-off method, it is important to note the application and the constraints and what trade-offs may be made to achieve that without compromising much on the desired performance.
4. FWMAV landing
Just like take-off, landing also poses a challenge for FWMAVs. To achieve precise, successful, and robust landing sequences, the landing maneuver, flight dynamics, stability and control, and the hardware components, i.e. the landing mechanism and its actuation, are essential aspects to consider. This section will focus on landing mechanisms which, like take-off ones, are an integral part of a complete flight mission, especially if the mission is to be carried out autonomously. The requirements for successful landing are discussed in section 4.1, whereas section 4.3 presents different landing approaches applied on FWMAVs along with examples.
Additionally, some mechanisms studied for different types of aerial vehicles are also discussed along with examples (section 4.3), focusing more on those solutions that are or can be applied to FWMAVs. In the end, a comparative analysis is given (section 4.4), and solutions deemed more suitable for flapping wing applications are identified.
4.1. Requirements for landing
Landing requirements are closely related to take-off requirements since the vehicle must attain a successful landing and then take off from that position again. Landing requirements also depend on the type of vehicle and the landing surface. For VTOL-capable FWMAVs, for example, landing is easier to handle on the ground. However, in case of an irregular surface or a tree branch that is cylindrical, landing becomes challenging. A precise landing maneuver is required with minimum loading on the vehicle itself. Alternatively, a controlled crash landing where the vehicle is robust enough to absorb the crash and land successfully can also be effective. Also, a mechanism that can successfully land on various surfaces and structures would be advantageous. These surfaces may include but are not limited to, cylindrical surfaces like a rod or tree branches, circular or curved surfaces like a spherical edge of a pole, and planar or inclined surfaces like the ground. The roughness of the landing surface also plays a vital role since the vehicle should be able to maintain its position after landing so that a further take-off sequence may be initiated. It should be adaptable to the environment of the envisaged mission depending upon available space and structure and possible motion after landing. It is essential that the mechanism is lightweight, adaptable, agile, and stable and should not cause control issues during flight. Also, it should consume a minimum amount of energy both for actuation and for continuous perching.
Control of the mechanism is also challenging since having a more active control and a fully actuated system, although potentially more accurate and allowing for a stronger attachment, will require further weight addition. Passive actuation is relatively less complicated and generally has a lower weight. However, the robustness and precision will typically drop. The choice of active vs. passive actuation may significantly impact the final design. Active actuation will also require more energy therefore, it may not be energy efficient and may also require an additional battery on board which will result in more weight. Similarly, an under-actuated system will have a lesser weight and may be more suitable for lightweight FWMAVs with limited payload capacity. A fully actuated system, on the other hand, will be complex, heavier but more reliable and robust. A better dynamic model will allow for more accurate control of the vehicle and a more precise maneuver may be executed by the vehicle, increasing landing accuracy. Having a robust approach that allows it to crash onto the object at a non-zero velocity and attach itself to the landing structure does not require precise control, and assumptions in the dynamic modeling may also have a lesser impact. However, such a mechanism and maneuver may damage the structural integrity after repeated operations. While it is viable at the current stage, it may not be a practical solution, especially for carrying heavier payloads. Another important consideration is the energy consumed by each mechanism. Passively actuated mechanisms generally consume less energy. Therefore, this will save the battery from draining during perch and increase the overall endurance. A mechanism that can also recharge the battery while in a perch position would be helpful.
Material selection also plays a significant role. Polylactic acid (PLAs) are widely used to develop perching mechanisms, especially for 3D-printed claws. Silicon-based grippers are also used because they are highly flexible, adaptable, lightweight, and easy to mold into different shapes. Claws made from carbon fiber are also used. They are more robust but show less flexibility.
Various studies have been conducted for natural flyers to understand their landing behavior. They include Flower [94], which focused on insect flight and a discussion on landing for insects. The evolution of perching in birds was a focus of Feduccia [95]. Bonder [96], Birn et al [97] and Tang et al [98] gave further notes on landing in birds while landing in insects was studied by Gorb [99] and [100]. Inspiration for FWMAV landing approaches is again taken from nature. Although the discussion in the following subsections includes approach maneuver, control, and mechanical design, the focus will be on the latter.
4.2. Landing maneuver & control
For the landing phase of a FWMAV, the approach maneuver, control, and stability are significant. Aerodynamic restrictions should also be considered while devising a suitable landing mechanism. For example, a VTOL-capable FWMAV can perform a simple maneuver to align with the surface and land however, bird-like FWMAVs do not possess this capability therefore, it is crucial that aerodynamic loads, i.e. lift and drag, are thoroughly considered. The landing maneuver considerably depends on the aerodynamics of the FWMAV. Cory and Tedrake [101] performed experiments for fixed-wing UAVs capable of performing high angle-of-attack maneuvers and performed landing on a perch and later extended the work to apply the same approach on an Ornithopter [102]. Paranjape et al [103] considered a pitch-up perching maneuver, and it was noted that yaw stability and control are essential for perching, especially in constrained spaces. Several studies have investigated control approaches for perching/landing maneuvers, for example, Paranjape et al [104], where a dihedral-based control algorithm for a 44 g FWMAV was proposed for perched landing. Maldonado et al [105] discussed adaptive control for a flapping wing perching maneuver. Scientists have studied fixed-wing UAV perching as well to understand perching maneuvers and their execution [101, 106–108]. For three-dimensional perching, flight dynamics and optimization for a perching maneuver have been studied for a fixed-wing UAV having a thrust-to-weight ratio of less than one [109]. Klein et al [110] studied the trajectory of Harris' hawks (Parabuteo unicinctus) that minimize the distance flown by stalling. Trajectory optimization for a fixed-wing UAV in perching was discussed by Nguyen et al [111]. The above examples demonstrate that optimizing the perching maneuver is still an area not explored in depth. Some studies have been conducted, and they also focus on tailed configuration. High-speed swooping perch, as done by birds [110], is still something man-made vehicles cannot achieve, and further study in this field is required. This requires robust and active control and quick response time for the maneuver. This gap must be explored further, and feasible solutions must be developed. For VTOL-capable MAVs, landing on a planar surface is relatively simpler as their vertical landing approach does not involve complex maneuvers or control challenges. Similarly, some bird-like MAVs can directly perform a belly landing on a planar surface however, that is constricted to only soft surfaces, therefore preventing any potential damage to the vehicle.
4.3. Existing landing techniques
Research on landing techniques for MAVs has so far mainly focused on fixed-wing and multi-rotor vehicles. A comprehensive review was conducted by Meng et al [50] covering the grasping and perching capabilities of aerial robots. It details the existing techniques used in multi-rotor aerial vehicles. Nonetheless, this review helps us understand what may or may not work for bioinspired aerial vehicles. The current paper will focus on methods already proposed for FWMAVs and methods that may be adopted for such vehicles in future work. bioinspired landing methods can be further categorized as:
- Grasping
- Attaching
These classes of methods are discussed separately in the next two sections.
4.3.1. Grasping
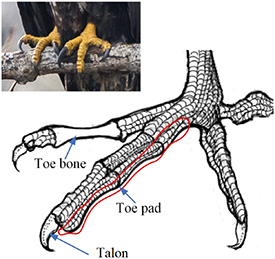
Grasping is a means to establish contact with an object and then firmly hold onto it using fingers, claws, or similar structures, as in the case of birds. Most birds apply this technique to catch prey and hold on to tree branches or other surfaces and structures, thus remaining perched after landing. The structure of a bird's feet is highly flexible and can adapt to different shapes (shown in figure 9). Talons help to provide additional grasping ability and to hold onto the object. Some birds demonstrate an automatic response when perching [113]. This consists of an automatic digital flexor mechanism and a digital tendon-locking mechanism ( ). Their knees and ankles are bent under body weight, and the tendon that runs down the thigh to the digits is stretched, causing the digits to be pulled passively to hold the perch [114]. When grasping is complete, the DTLM will latch the tendon to secure the grasp without requiring muscular effort. Due to the flexible nature of birds' feet, they can land easily on a flat surface. A simple structure of a bird's feet is given in figure 9. Among others, Lockhart [115] & Csermely et al [116] discuss the morphology of a bird's feet and talons and how they differ in various bird species.
Download figure:
Standard image High-resolution imageResearch on FWMAVs and their real-world applications has grown rapidly in the last two decades. Recently, Gomez et al [117] applied shape memory alloys (SMAs) actuated claws for perching on a branch or cylindrical surface with a flapping wing MAV weighing 450 g (table 5). The claws were made of PLA and thermoplastic polyurethane. The overall weight of the prototype with the perching mechanism was more than 500 g. A novel idea was presented to introduce SMAs in flapping wing applications, which resulted in a lighter mechanism since no servos or other electronic components were required. However, challenges related to SMA actuation time still need to be improved in applying this technology. Similar work for perching of an FWMAV was carried out by Zufferey et al [118]. Lightweight passively actuated carbon fiber claws were used on a vehicle weighing 500 g (table 5) with a grasping speed of 25 ms. The perching mechanism itself was 200 g in weight. Flight tests were performed for a simple pitch-up maneuver to attain autonomous perching, and the study found the minimum velocity limit, i.e. 3 m s−1, for successful perching with a holding torque of 2 Nm. The positioning of the leg mechanism was actively controlled to enhance the accuracy of the perch.
Table 5. FWMAVs with grasping capability.
| Article | Mechanism | Weight | Surface | figure |
|---|---|---|---|---|
| Gomez (2020)[117] |
|
|
|
 © 2020 IEEE. Reprinted, with permission, from [117]. © 2020 IEEE. Reprinted, with permission, from [117].
|
| Zufferey (2022)[118] |
|
|
|
 Reproduced from [118]. CC BY 4.0. Reproduced from [118]. CC BY 4.0.
|

Flapping-wing perching, however, is only a recent topic due to the significant challenges it involves. By contrast, perching has been extensively studied in the context of fixed-wing and especially multirotor MAVs to extend their limited endurance. Aerial grasping of an object has also been demonstrated on fixed-wing and multi-rotor aircraft. The above examples of grasping-based perching were developed explicitly for FWMAVs. However, studies have also been conducted on grasping mechanisms for multi-rotors and non-flying robots. Selected examples deemed suitable for FWMAV applications are discussed further in this section. An avian-inspired, passively driven, 478 g mechanism was developed with two under-actuated claws mounted on a quad-rotor [119]. Various bioinspired claw-type perching mechanisms for quad-rotor applications have been designed [120–122]. As seen in figure 10(a), a lightweight gripper mechanism weighing 9 g was developed and tested by Zhang et al [123]. The overall weight of the vehicle was 36 g, which makes such a mechanism suitable for lightweight FWMAVs, especially those possessing VTOL capability, since VTOL is less complicated than other approaches. Another bird-inspired perching mechanism was developed by Nadan et al [124]. Bai et al [112] also performed experiments for a grasping-based perching mechanism, shown in figure 10(b), that can carry and perch with a payload weighing 15 times its weight. The overall weight of the aerial vehicle with all components was 1.95 kg. Another mechanism developed by Stewart et al [24] is a passively actuated claw that requires a force of 0.89 N to trigger and is shown in figure 10(c). A 28 g mechanically intelligent passive gripper was mounted on a system weighing 593 g for aerial grasping [125]. A soft gripper weighing 45 g, shown in figure 10(b) based on the fin-ray effect, was developed [126]. Simulation and experimental results for the gripper were presented and suggested that due to its lightweight and bioinspired design, it can be promising to see such a mechanism being adapted for FWMAVs. While some of the examples mentioned above could be adapted to FWMAVs, doing so remains a challenge, and significant work is still required in this area for efficient perching. Considerable challenges include the weight constraint and robustness of the mechanism. A complex perching mechanism will add weight, whereas a simple, lightweight one may need to be more robust or has enough strength. The mechanism should be strong enough to carry the vehicle's weight effectively and light enough for the MAV to carry it during flight. Since landing surfaces and structures differ significantly, the mechanism should be adaptable and not pose additional control and stability challenges. The response time for grasping is also essential, especially when considering take-off from the perched position. As the above examples show, these mechanisms can only be applied to land and perch on a cylindrical or circular structure. Planar landing is not feasible with simple grasping.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 10. Examples of Perching MAVs. © 2019 IEEE. Reprinted, with permission, from [123]. © 2022 IEEE. Reprinted, with permission, from [126]. Reproduced from [24]. CC BY 4.0. Reproduced from [112]. CC BY 4.0.
Download figure:
Standard image High-resolution image{kind=link}
Grasping mechanisms, although feasible for heavier FWMAVs, also possess certain disadvantages. Grasping mechanisms are usually more complex. They often involve complex active actuation and are generally heavier than other mechanisms like direct attaching. For FWMAVs that do not possess VTOL capability, an intense perching maneuver may be required to achieve successful grasping. As mentioned previously, the closing and opening time of claws is also a determining factor for efficient perching. A potential approach to avoid continuous energy expenditure is using a bi-stable mechanism. Grasping is also suitable for landing on cylindrical surfaces; however, landing on a flat planar surface becomes challenging with this mechanism.
4.3.2. Attaching
Attaching means adhering to a surface in such a way that the friction between the body and the surface is strong enough to support the weight of the body. This can be achieved by using magnets [127], vacuum pumps [128], or adhesives [129]. Embedding is another attaching technique that uses insect-inspired, spine-based attachment, as seen in dragonflies. Natural flyers, especially insects, can attach themselves to surfaces and possess the ability to not only land on a horizontal surface but also attach themselves on vertical and inclined surfaces and ceilings. Gorb [130] and [100], among others, have discussed the attaching mechanism of insect legs. Insect legs have sticky hairs that allow them to land on various surfaces, attach to them, stay there to rest and eat, etc. Autumn et al [131] describes a similar adhesion technique used by the Gecko that attaches itself to various surfaces and can hold on to ceilings due to the high friction and strong adhesion ability of its fingers. Such behaviors can also be applied in modern FWMAVs to make them more robust and enhance their landing capabilities.
Attaching solutions for FWMAVs have been studied by researchers as a means to perch on various surfaces. These mechanisms are particularly suited for small FWMAVs, as they can be implemented passively and generally have minimal weight. Notable work includes Chirarattananon et al [132, 133] and Graule et al [134], where a 100 mg FWMAV demonstrates magnetic planar perching. The perching mechanism itself weighed 20 mg. The FWMAV was able to mimic an aggressive maneuver, as demonstrated by insects to perch on a vertical wall. A 1.5 kg FWMAV was equipped with a 35 g magnetic claw mechanism to demonstrate perching using a lightweight solution [127], as shown in table. 6.
Table 6. FWMAVs with Attaching Capability.
| Article | Mechanism | Weight | Surface | figure |
|---|---|---|---|---|
| Chirarattananon et al [132] |
|
|
|
 © 2014 IEEE. Reprinted, with permission, from [132]. © 2014 IEEE. Reprinted, with permission, from [132]. |
| Pérez-Sánchez et al [127] |
|
|
|
 © 2021 IEEE. Reprinted, with permission, from [127]. © 2021 IEEE. Reprinted, with permission, from [127]. |
Such mechanisms have also been developed and installed for non-flapping wing aerial vehicles, for example, Desbiens et al [135, 136] and Glassman et al [137] developed a 28 g micro-spine-based attaching system to achieve vertical perching on walls for a fixed-wing UAV. A 27 g Crazyflie quad-rotor was equipped with an 11 g mechanism to enable it to attach to and climb vertical surfaces Pope and Cutkosky [138] and [139], where the attachment was done by using micro-spines. Another similar approach applying micro-spines as a means for an aerial vehicle to attach to a surface was studied by Nguyen et al [140], where a 32 g mechanism was installed on a 1.7 kg quad-rotor and perching on various objects was achieved. Daler et al [129] applied an adhesive-based perching mechanism for an aerial vehicle weighing 0.3 kg. Dry adhesive-based perching for a 550 g aerial system was experimented with by Kalantari et al [141]. Park et al [142] studied a lightweight electro-adhesive-based perching mechanism. A passive vacuum cup-based perching system weighing 0.3 kg was developed and was mounted on a quad-rotor of 1.8 kg [128]. Liu et al [143] also used a similar technology for a 1.77 kg quad-rotor. Due to being lightweight and able to carry payloads much heavier than their weight, these mechanisms may be applied to FWMAVs.
Magnetic-based solutions are lightweight and can be applied to small VTOL-capable FWMAVs to much larger bird-like FWMAVs, thus providing a broader range. They have also been applied to ultra-lightweight MAVs [132]. This perching type generally does not require a fully actuated, active actuation process. For conventional magnets, significant thrust may be required to disengage the perched position. Electromagnets are an alternative, but they require more active actuation. Magnetic-based mechanisms are easier to miniaturize since magnets of various sizes, shapes, and strengths are already available. Micro-spines also show a more comprehensive range of applications on FWMAVs. However, they are challenging to miniaturize. They are suitable for insect and bird-like FWMAVs but require a more precise maneuver and an active-passive actuation. Adhesive-based perching is generally suited for lightweight vehicles having VTOL capability. Such mechanisms are passively actuated and do not pose additional control challenges. Vacuum pumps are much heavier and suitable only for vehicles with heavier payload capacity. Miniaturizing them is also complex. They can be actuated passively and provide a greater holding force.
Attachment mechanisms tend to be lighter, and their power requirement is also generally significantly lower than the power required for grasping. However, weight restriction is the main disadvantage. Attachment mechanisms have the advantage that many can also be applied to much smaller MAVs, which is often harder to do with actuated claws. As mentioned previously, some experiments have been conducted on larger bird-like FWMAVs [127] and quadrotors [128]. However, some of these approaches only work for specific surfaces. For example, for magnetic-based perching, a magnetic surface is required for landing, and applying these techniques to a generic surface requires further insight. This is a drawback for most attaching mechanisms, as a specific type of surface is required, and they cannot adhere to multiple surfaces, limiting their usage.
4.4. Comparison between landing mechanisms
Table. 7 summarizes a comparison between both types of perching mechanisms. Each type displays distinct features. The grasping technique is more bionic, offers a higher holding torque, can adapt to various sizes, and can be designed to hold on to their perched position without energy consumption. This can greatly increase the overall endurance of the vehicle, especially while surveying, where the monitoring can be conducted from a perched position and without consuming energy. They can be combined with micro-spines to enhance their adaptability and robustness. They are, however, heavier, more complex, have a relatively slow response time, need more power to actuate the claws, and can generally be used only for cylindrical or spherical perching. Attaching techniques are more straightforward, lighter, and generally have a lower power consumption. However, it may not provide ample holding torque, and each mechanism is designed for a specific surface. Each attaching type varies significantly from the other, mainly due to the requirement of a specific surface. Magnets do not work on non-magnetic surfaces and irregular shapes do not provide enough suction for vacuum pumps. Similarly, adhesives depend on the type of adhesion used and the suitable surface for them. Most attaching mechanisms can have a passive actuation and, thus, require less energy consumption. However, detaching from the surface will require adequate thrust to disengage. Using electromagnets provides more control, and detaching from the surface is easier, but they require more energy, thus, reducing the endurance of the vehicle. Vacuum pumps are heavier, and although they are easier to detach, they need more energy for continuous suction. It is also evident that the type of attaching mechanism, or generally the landing mechanism, will significantly affect the overall endurance of the vehicle depending on the energy consumed by the mechanism itself. Attaching mechanisms show promising results for smaller vehicles, where the landing surface is known and where being able to attach to different types of surfaces is not required. These smaller FWMAVs are generally used, for now, in indoor, simpler, more predictable environments since they are less robust. Also, most natural surfaces will not work with magnets or suction cups. Micro-spines, on the other hand, work well with branches and can hold large weights. For FWMAVs that are larger or to be deployed in outdoor environments, especially those required to perch on tree branches and in other natural environments, grasping may provide a more practical solution since its higher torque-holding capability and adaptability to different cylindrical shapes ensures that the vehicle will remain attached to the surface.
Table 7. Landing Methods.
| Method | Key Characteristics | Advantages | Challenges | FWMAV Examples |
|---|---|---|---|---|
| Grasping |
|
|
| |
| Attaching |
|
|
|
The drawbacks of each landing type discussed above restrict their use however, with current progress, these may be overcome in the future and a better solution for FWMAV perching may be provided. Specific challenges still need to be addressed for successful FWMAV landing and perching. Ground clearance for an FWMAV is a challenge, especially for bird-inspired FWMAVs, and the mechanism should be elevated enough that wings have appropriate ground clearance. However, this will also increase the moment arm and cause instability. As mentioned above, weight greatly restricts the type of mechanism with which the FWMAV can be equipped. The mechanism should also refrain from introducing new challenges during the flight phase while maneuvering through cluttered spaces and must be stable and controllable. There is a trade-off that has to be made. For example, a heavier mechanism is more robust and may provide a more stable solution, whereas a lightweight, simpler solution may lack adaptability. Adding more complexity and sophistication to the mechanism may improve its precision, however, at the cost of carrying more weight.
It would be an added advantage to develop a mechanism that can perch on different structures, adapt to different geometries, and have the ability to move on the ground after landing. These additional locomotion capabilities can significantly enhance the practical applications of FWMAVs. Moreover, reducing any structural damage upon damage will also enhance prospects. Combining a claw-based mechanism with an attaching mechanism makes it possible to perch not only on tree branches and other similar surfaces but also to land on the ground, i.e. horizontal or inclined surfaces. This may still be possible only on specific types of surfaces, which will depend on the applied attaching mechanism. Moreover, a complex landing maneuver may be required to overcome the large inertial forces the FWMAVs pose for such a landing. Improving their stability during the landing maneuver, using the higher drag during landing to bring the vehicle to a zero velocity before touch-down, and improving the dynamic model during the landing phase can help achieve this and, thus, greatly enhance the viability of FWMAVs in future applications.
5. Conclusions and future work
This article offers a detailed review of the landing and take-off capabilities of FWMAVs and associated challenges, their requirements, and open research problems. Different types of FWMAVs and their distinct features were extensively discussed, providing a thorough understanding of these vehicles. Various types of landing and take-off mechanisms that have been adopted for FWMAVS were presented. The literature review presented in the article recommends some existing mechanisms that can be applied to FWMAVs. The importance and necessity of having a reliable take-off and landing mechanism for an FWMAV were also highlighted and further discussed the current state-of-the-art in this area. The take-off mechanism was discussed in detail, including its requirements and types, such as jumping, running, gliding, and VTOL. The article also thoroughly compares these methods and their suitability for different applications. Additionally, the review suggested some models from the literature that could be applied in FWMAVs. Similarly, the landing mechanism and its types, such as grasping and attaching, were also discussed in detail, and their examples and further suggestions from the literature were presented. However, there is still a considerable gap in this area regarding FWMAVs.
Future research should focus on combining these methods and working on the control and stability of these mechanisms. The flight performance of FWMAVs, when equipped with these mechanisms, is another area that requires further exploration. The article also emphasizes the need to decrease the overall complexity of the system and suggests working on more adaptable solutions to enhance the future applications of FWMAVs. Moreover, developing a mechanism that can take off and land from and on the ground and from perched positions like tree branches would be a promising area for future research. Performing these tasks autonomously would further improve the overall mechanism and significantly enhance the capabilities and future applications of FWMAVs.
In conclusion, the present article provides a comprehensive review of the landing and take-off capabilities of FWMAVs. The review highlights the importance and needs for reliable take-off and landing mechanisms for these vehicles and the current state-of-the-art in this field. The study also identifies gaps in the research and provides suggestions for future research, intending to enhance the overall capabilities and applications of FWMAVs.
Data availability statement
All data that support the findings of this study are included within the article (and any supplementary files).