

Abstract
The past ten years have seen the rapid expansion of the field of biohybrid robotics. By combining engineered, synthetic components with living biological materials, new robotics solutions have been developed that harness the adaptability of living muscles, the sensitivity of living sensory cells, and even the computational abilities of living neurons. Biohybrid robotics has taken the popular and scientific media by storm with advances in the field, moving biohybrid robotics out of science fiction and into real science and engineering. So how did we get here, and where should the field of biohybrid robotics go next? In this perspective, we first provide the historical context of crucial subareas of biohybrid robotics by reviewing the past 10+ years of advances in microorganism-bots and sperm-bots, cyborgs, and tissue-based robots. We then present critical challenges facing the field and provide our perspectives on the vital future steps toward creating autonomous living machines.
1. Introduction
As a field, robotics has often taken inspiration from living organisms [1–4]. For applications in which behavioral flexibility, autonomy, and safe human interaction are needed, animals provide a living template for possible engineered solutions. Historically, a continuum of approaches combining biology and robotics has existed, from highly abstract interpretations of biological processes and structures to deeply biomimetic reproductions of living organisms.
Research in biologically inspired and biomimetic robots exists at an exciting intersection between application-driven engineering solutions and hypothesis-driven basic science. On one side of this intersection, by taking inspiration from living systems, engineers have created highly successful mobile robots capable of functioning in real-world environments [5–9]. Researchers have also drawn from basic science efforts in biophysics to enable the predictive design of biohybrid robot structure and function. Conversely, robots have served as tools for basic science, allowing hypotheses from biology and neuroscience to be tested in more controlled environments, as well as posing as interesting reverse-engineering platforms to understand multicellular systems [10–12]. Integrating tools from nature into robotic systems can address many of the grand challenges in current robotics, such as power consumption, damage tolerance, and adaptation in complex, unstructured environments for real-world applications [13]. In addition to advances in robotics, biohybrid robotic tools can allow for a better understanding of fundamental biophysics and biology [4, 14].
Traditionally, rigid and soft robots are fabricated with entirely engineered building blocks and synthetic materials. However, biohybrid approaches incorporating living cells, biological tissues, microorganisms, and entire animals offer unique opportunities for improving robotics and probing biology. Furthermore, living materials in biological systems are biodegradable, self-healing, naturally compliant, and can lead to adaptable actuation and control [15–23]. Thus, biohybrid robotics, or the design and use of living machines, is a transdisciplinary field with a wide range of technology readiness levels, from research tools for fundamental science and models of biology to translational applications in human health and medicine, mobile robotics, environmental stewardship, and beyond.
This perspective article briefly reviews the past 10+ years of research and development in biohybrid robotics to provide historical context. For further comprehensive reviews of biohybrid actuation and biohybrid robotics, interested readers are encouraged to refer to [15–24]. We will then discuss the current challenges facing the field and provide our perspective on the future of biohybrid robotics for use as tools for scientific inquiry and applications in the robotics domain (figure 1).

Figure 1. Biohybrid robotics has experienced a research boom over the past ten years. In this perspective we review the last 10+ years of tissue-based biohybrid robots, cyborgs, and micro-organisms bots. Based on the state-of-the-art, we identify the next challenges facing the field and future directions need to advance biohybrid robotics toward broader applications. Robot images adapted with permission from: (1) cardiac muscle cell-based swimming fish. From [25]. Adapted with permission from AAAS. (2) Cardiac muscle cell-based robotic ray. From [26]. Adapted with permission from AAAS. (3) Cyborg locust. © [2022] IEEE. Reprinted, with permission, from [27]. (4) Cyborg beetle. © [2020] IEEE. Adapted, with permission, from [28]. (5) Bacteria-mediated drug delivery robot [29], (6) sperm-carrying micromotors. Adapted from [30] John Wiley & Sons. © 2017 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. (7) Skeletal muscle-based crawler. Adapted from [31]. CC BY 4.0, inspired by www.youtube.com/watch?v=skCzl7FlM34. (8) Skeletal muscle-based swimming biobot [32]. From [32]. Adapted with permission from AAAS.
Download figure:
Standard image High-resolution image2. 10+ years of biohybrid robots
2.1. Microorganism-bots
Microbial biohybrid robotic systems, with characteristic dimensions (1 μm), are comprised of unicellular micro-organisms (e.g. bacteria, fungi, algae, etc) integrated with micro/nanoscale functional components, such as nanocarriers of therapeutic loads, nanosensors, etc. Microbes' resilience in tolerating changes in temperature, pH, nutrient availability, and other environmental conditions makes these biohybrid systems ideal candidates for various applications, including drug delivery, biosensing, environmental monitoring, and bioremediation, as have been investigated over the past 15 years [33–36].

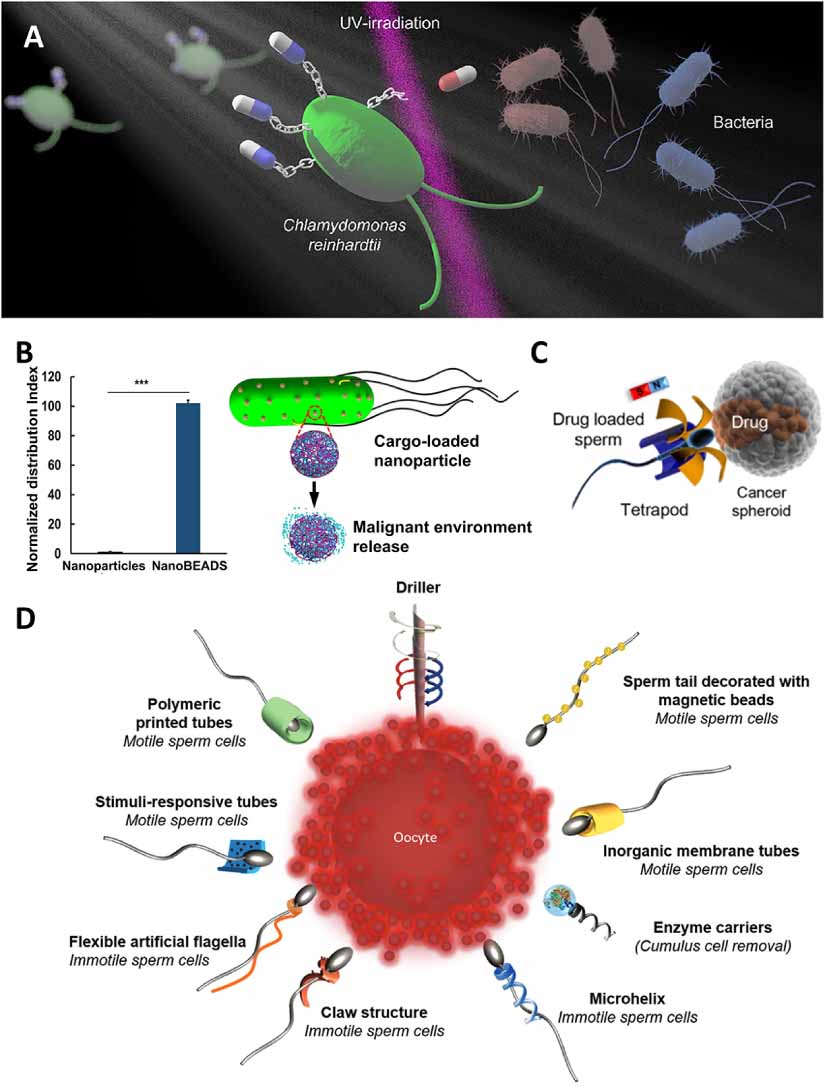
The pioneering works in this area harnessed microbes, primarily bacteria, for controlled actuation with applications in cargo transport and assembly. Weibel et al [37] transported microparticle cargo attached to the surface of the phototactic algae Chlamydomonas reinhardtii. Specific wavelengths of light were used to steer the biohybrids and release the loads. Martel et al [35] used the magnetotactic Magnetospirillum gryphiswaldense bacteria to position microparticles under the control of an external magnetic field. Behkam and Sitti [34] developed a chemical switching technique for on-demand stop/go control of Serratia marcescens-propelled polystyrene microparticles. Building upon these and other early works, recent years have seen the development of a myriad of application-focused microrobotic systems (for recent reviews, see [38, 39]), including transport and delivery of therapeutic cargo [40–42], biofilm treatment [43, 44] (figure 2(A)), and biosensing [45–47]. Microbial biohybrids have also been used to address challenges of high throughput micro-object assembly and manipulation [48, 49].

Figure 2. Characteristic examples of micro-organism biohybrid robots. All images adapted with permission. (A) Conceptual schematic of Chlamydomonas reinhardtii microswimmer for UV triggered drug delivery. Reprinted from [44], Copyright (2021), with permission from Elsevier. (B) Nanoscale bacteria-enabled autonomous drug delivery system. Adapted from [40]. CC BY 4.0. © 2018 The Authors. Published by WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. (C) Example of magnetic steering of sperm-based tetrapod for targeted drug delivery. Reprinted with permission from [73]. Copyright (2018) American Chemical Society. <https://pubs.acs.org/doi/10.1021/acsnano.7b06398> Further permission related to the material excerpted should be directed to the ACS. (D) Examples of how Spermatozoa can be augmented as biohybrid robots for fertility treatments and drug delivery. [30] John Wiley & Sons. © 2017 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim.
Download figure:
Standard image High-resolution imageGiven the minuscule size of each microbial biohybrid agent, the collaboration of thousands or more agents is often necessary for effective task completion. Indeed, research works have harnessed the ability of microbes to sense and respond to externally imposed stimuli gradients of magnetic fields [35, 41, 48], chemoeffectors' concentrations [50, 51], light [36, 37, 52, 53], pH [54], and electrical fields [55] for centralized motion control in microbial robotic systems. In some cases, components of the biological system can be isolated to imbue due properties on synthetic materials, such as the use of photosynthetic chlorophyll for semi-artificial photosynthesis [53]. Each stimulation approach has advantages and limitations with regards to biohybrid robot speed, manoeuvrability, addressability, adaptability, and translation to real-world applications. While a quantitative analysis of these differences is beyond the scope of this work, interested readers are referred to several recent reviews on biohybrid robots for such analysis [9, 19, 38, 56–59].
Centralized control approaches are shown to be effective in controlling microrobotic swarms; however, individual addressability is limited. In some cases, such as an electric field or UV light, wherein a centralized control approaches allow for individual addressability, scalability to large populations can be challenging [60]. Decentralized control schemes, wherein each agent interrogates its environment and makes independent decisions based on its state, would greatly enhance the capabilities and potential of biohybrid systems. Moreover, hybrid control schemes combining centralized and decentralized control strategies can be advantageous. For instance, in the case of targeted drug delivery applications, a decentralized control scheme can be used to prevent off-target cargo release by agents that failed to respond to the centralized control signal to reach the site of interest [61].
The decentralized control of biohybrids requires programming the agents for robust and predictable emergent behaviors. Such programming, enabled by synthetic biology [62], offers vast possibilities for building biohybrid microrobotic swarms with sophisticated control schemes. A particularly powerful genetic circuit paradigm is quorum sensing (QS), a number-density-dependent form of population cooperation mediated by small diffusible signaling molecules [63]. QS circuits are bistable. When a critical signal concentration is reached, the circuit exhibits a switch-like behavior to an 'activated' state of high signal enzyme production, as well as the transcription of any other downstream genes [64–69]. We recently demonstrated that synthetic QS circuits could be used to address the need for engineering sensitive and robust decentralized emergent behaviors in populations of biohybrid microrobots [61, 70]. Synthetic biology has also been used to impart other functions, such as creating biohybrid microrobotic sensors [71] and light-based control of cargo release by microrobots [72].
Sperm-powered biohybrids are an emerging type or robotics where multiple engineering architectures can be integrated into the system [30, 74] (figure 2(D)). Earlier works comprised the encapsulation of single bull-sperm into microtubes, both metallic [75, 76] and polymeric [77]. Spermbots are capable of swimming in bovine oviduct fluid even when trapped in magnetic microtubes [78]. In these cases, motion was provided by the sperm itself. Human sperms loaded with Doxorubicin were used for the treatment of 3D cervical cancer and patient-representative ovarian cancer cell cultures. The sperm cells were trapped into drug-loaded magnetic microcaps enabling their magnetic guidance and co-drug transport and release [79]. Moreover, immobile sperms are entrapped into metal-coated polymer microhelices which are magnetically actuated and guided in fluidic devices (figure 2(C)). Drug loaded sperms are captured, guided and released specifically into in vitro cultured tumor spheroids [73]. Sperms can also be used as templates for magnetic particle adsorption and magnetic actuation into what was called IRONSperms [80, 81]. This method allows for fundamental studies of cell–particle interactions and also sperm biohybrid dynamics for future development of biohybrid robotics.
2.2. Tissue-based biohybrid robots
2.2.1. Cardiomyocyte-powered devices
In the development of biohybrid robotics as a field, many researchers have taken advantage of cardiomyocytes as a source of living actuation [21]. Cardiomyocytes can be isolated from neonatal rats or even insects, having already differentiated into striated muscle cells [82–85]. As such, cells exhibit predictable behavior when seeded on robotic structures [82]. Alternatively, cardiomyocytes can be derived from human-induced pluripotent stem cells (hPSCs) [25, 86, 87]. Furthermore, cardiac tissue exhibits excellent contractile properties and can undergo millions of actuation cycles without needing rest to prevent fatigue [88].
As an electrically excitable, self-actuating tissue, cardiomyocytes have been used with bottom-up manufacturing approaches to create a wide range of small and soft robotic devices. Cardiomyocytes respond to patterning from surface geometry and protein patterns, allowing desired tissue patterns to be engineered in monolayer cultures [83, 89]. Using this approach, biohybrid cardiomyocyte robots have been created for swimming [25, 26, 83, 84, 89–91], pumping (figure 3(C)) [92–97], crawling [88, 92, 98], and as models for biological studies on the role of cell orientation in tissue formation and function. Additionally, explanted cardiac tissues can be interfaced with soft robotic structures to create crawling [99] and gripping [100] robots.

Figure 3. Characteristic examples of tissue-engineered biohybrid robots adapted with permission. (A) Biohybrid swimming fish-inspired robot for studying mechanical entrainment of cardiomyocytes as a model of heart pumping, scale bar 5 mm. From [25]. Reprinted with permission from AAAS. (B) Skeletal muscle-based biohybrid robot with a compliant skeleton to improve tissue alignment and allow locomotion, scale bar 100 μm. From [32]. Reprinted with permission from AAAS. (C) A biohybrid micropump for valveless pumping. Reproduced from [97]. © IOP Publishing Ltd. All rights reserved. (D) Skeletal muscle tissue based antagonistic muscle pair for bidirectional joint actuation. From [104]. Reprinted with permission from AAAS. (E) A small-scale gripper capable of air-operation actuated by caterpillar dorsal vessel tissue, scale bar 5 mm. Reproduced from [100] with permission from the Royal Society of Chemistry.
Download figure:
Standard image High-resolution imageRecently, cardiomyocyte-powered biohybrid robots have also clearly demonstrated the important role of materials science and optogenetics as inputs and outputs in the interdisciplinary field of biohybrid robotics. For example, as inputs to biohybrid systems, conductive scaffolds, and robotic substrates can improve the coordination and function of cardiomyocyte biohybrid robots [98, 101]. The use of flexible electronics in the scaffolds of such devices can further allow biohybrid robots to be wirelessly powered [86]. Optogenetics can also be leveraged to provide an optical stimulation to engineered cells [21, 26, 102, 103]. Finally, novel material integrations can also be used to read information from biohybrid robots for medical and drug screening applications. Sun et al have demonstrated how structural color can be used as a visual readout of contraction [98].
Research on and development of cardiomyocyte-based biohybrid robots also provides a closed feedback loop for testing our understanding of the biological mechanisms of cardiac function. The design of biohybrid robots requires an understanding of fundamental principles of tissue formation and maturation. For example, by understanding the pattern and timing of electrical signal conductance between cells in cardiac tissue, researchers have been able to design robotic systems that use spatial patterning to induce waves of contraction along the fins of a soft ray-inspired robot to produce locomotion [26]. Similarly, biohybrid robots understanding the role of chemical compounds on tissue function allowed researchers to dynamically alter signal propagation velocity in cellular mechano-informatics network gel robots composed of cardiomyocytes through the application of adrenaline [103]. Biohybrid robotics can also close the loop back to biological research. For example, recent work by Lee et al demonstrated the importance of stretch-induced antagonistic contraction on mechanical entrainment of contraction in opposing cardiac tissues (figure 3(A)) [25].
2.2.2. Skeletal muscle-powered devices
As the primary actuator system in mammals, skeletal muscle offers an efficient contractile behavior of special interest in robotics compared to cardiomyocytes due to its beating controllability and ability to self-regenerate [31, 105]. Additionally, the adaptability of skeletal muscle actuators has both been demonstrated in terms of compliance and enhanced force output due to specific training protocols (figure 3(B)) [32, 106]. Sarcomere assembly is key to obtaining functional muscle tissue, ensuring a proper muscle maturation process where the muscle precursor cells (myoblasts) are differentiated into aligned myotubes. Several factors, such as substrate stiffness, mechanical environment, and oxygen supply, are critical to generating a skeletal muscle actuator [82]. The design of skeletal muscle-based robotic devices generally implies the presence of a synthetic interface in the 3D culture, like a skeleton to the native muscle, to ensure the strain and mechanical integrity of the device. Therefore, most examples we find are biohybrid systems that fall into the soft robotic field, presenting flexible structures and moving in liquids containing the necessary nutrients and oxygen concentration, although a biohybrid robot moving in air has recently been reported [107].
Regarding the skeletal muscle source, the most common are immortalized cell lines (i.e. C2C12) that allows serial passaging [108], although hPSCs (including induced pluripotent stem cells and embryonic stem cells) able to generate myogenic progenitors has also been recently explored in skeletal muscle tissue engineering [109–111]. On the other hand, muscle actuators prepared with primary-derived skeletal muscle [112] or muscle stem cells present higher contractile forces. Still, the high costs associated with cell culturing and ethical concerns often make the use of immortalized cell lines preferred. Although we find some examples of 2D skeletal-muscle-based biohybrid systems [113], they are generally built in three dimensions due to the myofibers' 3D organization. The 3D conformation offers more degrees-of-freedom in fabrication by supporting fiber arrangement and cell alignment. Different biofabrication techniques had been explored, ranging from cast molding [114, 115] and 3D bioprinting [106], to electrospinning or microfluidic spinning [108]. In particular, recent advances in 3D printing techniques allowed the creation of on-demand 3D cell-laden structures, sometimes modeled beforehand to obtain the desired actuation/physical properties [21]. Bioink composition has also been extensively studied to reproduce the skeletal muscle physiology, achieving the fabrication of larger muscle constructs with improved muscle differentiation/maturation [108], as well as the regenerative potential of bioprined muscle tissue [116]. Among the skeletal muscle-based robots, we find valveless pump-bots [96, 117], myooids [118], walkers [31, 119], crawlers [120], grippers (figure 3(D)) [104], and swimmers [18, 32].
The most extended stimulation mode to actuate skeletal muscle cell biohybrid robots is using electrical pulses, adjusting the frequency and intensity to modulate the robot actuation. The electrodes can be located nearby the robot [106] or integrated into the same biobot skeleton [121]. Also, optical stimulation allowed a fine spatiotemporal actuation when applied in optogenetically modified bioactuators [17, 122]. To a lesser extent, ultrasound actuation [123] and chemical stimulation [124] have also been explored. To further improve stimulation, nanocomposite bioinks can be used to improve stimulation of skeletal muscle cells actuation, either by including piezoelectric nanoparticles [125] or modified gold nanoparticles [126].
Skeletal muscle-based biohybrid robotics is not only of interest for reverse engineering, where fundamental biological principles are studied in basic models, but also for the development of implantable devices and their implementation into healthcare applications as drug testing models. Additionally, the integration of muscle in future robotic systems can provide valuable attributes, such as self-healing and adaptive capabilities.
2.2.3. Invertebrate tissues
Invertebrate tissues offer an alternative to creating biohybrid robots and devices using cells and tissues from mammalian and avian sources. Whereas mammalian tissues are a natural selection for biomedical research models, their culture conditions and maintenance requirements may pose a barrier to translation in broader mobile robotic applications [24]. In comparison, invertebrate materials, such as insect antennae [127–130] or sea slug muscle [131, 132], have been shown to be robust to natural environments and capable of functioning in long-term culture, in some cases even without repeated maintenance [21, 133–135]. For example, tissues isolated from sea slugs have been shown to operate in artificial seawater environments at temperatures ranging from 14 °C to 20 °C [131]. Insect dorsal vessel (DV) tissue devices with sealed media chambers have been shown to remain operable in air for more than five days [100]. This robustness and the farmable and accessible nature of invertebrate organisms make them strong candidates for mobile robot applications.
Over the past ten years, numerous examples have highlighted the advantages and potential of invertebrate muscle as a bioactuator. In particular, insect DV has been widely used as an actuator for swimming robots [136], crawling robots [137], and grippers (figure 3(E)) [100]. Such insect muscle offers some possible advantages over mammalian muscle as a bioactuator in that it has a lower metabolic rate and can perform long-term in low maintenance systems. Another potential source of farmable tissues for actuation, and even control, is the use of materials from marine invertebrates, such as molluscs. Marine invertebrate muscle performs well in aquatic environments [132] and provides a possible source of neuromuscular control systems for applications in environmental monitoring [131].
The application of invertebrate tissues in biohybrid robotics has not been limited to muscles and motor control. Indeed, the sensitivity of many insect sensory organs has resulted in numerous biohybrid robots with biological sensors, such as biohybrid odor-guided robots with insect antennae [127] and 'Ear-on-a-Chip' robots with locust tympanic ears [138].
2.3. Cyborgs
Another approach to building biohybrid robots is the artificial enhancement of animals or using an entire animal body as a scaffold to manipulate robotically. The locomotion of these augmented animals can then be externally controlled, spanning three modes of locomotion: walking/running, flying, and swimming. Notably, these capabilities have been demonstrated in jellyfish (figure 4(A)) [139, 140], clams (figure 4(B)) [141], turtles (figure 4(C)) [142, 143], and insects, including locusts (figure 4(D)) [27, 144], beetles (figure 4(E)) [28, 145–158], cockroaches (figure 4(F)) [159–165], and moths [166–170].

{kind=link}
{kind=link}
{kind=link}
Figure 4. Characteristic examples of cyborg biohybrid robots including (A) augmented jelly-fish robot [140]. Reproduced from [139] and [171]. CC BY 4.0. (B) Clam-based biohybrid robot for aquatic water monitoring. Reproduced from [141]. CC BY 4.0. (C) Parasitic robot-based biohybrid robot for waypoint navigation. Reproduced from [143]. CC BY 4.0. (D) Cyborg locust with jump control. © [2022] IEEE. Reprinted, with permission, from [27]. (E) Cyborg beetle. Reproduced from [149]. Copyright 2018, Mary Ann Liebert, Inc. (F) Cyborg cockroaches. Reproduced from [165]. CC BY 4.0.
Download figure:
Standard image High-resolution image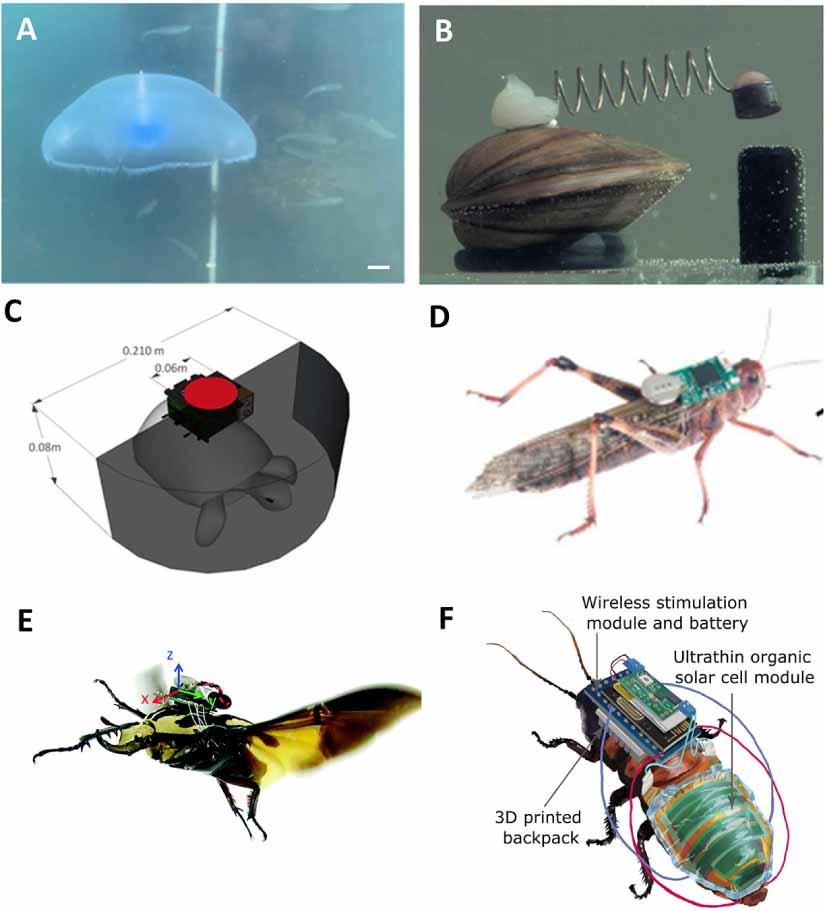{kind=link}
The advantages of using entire animals as cyborgs are multifold. For robotics, augmented animals possess inherent features that address some of the long-standing challenges within the field, including power consumption and damage tolerance, by taking advantage of animal metabolism [172], tissue healing, and other adaptive behaviors. In particular, biohybrid robotic jellyfish, composed of a self-contained microelectronic swim controller embedded into live Aurelia aurita moon jellyfish, consumed one to three orders of magnitude less power per mass than existing swimming robots [172], and cyborg insects can make use of the insect's hemolymph directly as a fuel source [173].
To illustrate, for cyborg insects, the biohybrid robot is locomoted by the insect platform itself. An electronics board mounted on the body electrically stimulates key neuromuscular sites of the insect, which induces turning and acceleration for the control of locomotion. Thus, cyborg robots do not need any artificial actuators for locomotion; all that is needed is electrical stimulation. Furthermore, the electronic payload can consume very low power, on the order of 0.1 mW [174]. In contrast, actuators used for artificial robots typically require hundreds of mW.
Furthermore, cyborg robots can use the insect platform to supply electric power. Researchers have developed biofuel cells that consume an insect's sugar-rich body liquid (hemolymph) by oxidizing glucose and trehalose to generate electric power [173, 175, 176]. Mounting or implanting such fuel cells into the insect body can provide a self-powering unit for biohybrid robots.
In addition, cyborg robots can save on the energy of onboard batteries and space for mounting electronics by using the animals themselves to avoid and overcome obstacles. Because insects themselves possess innate obstacle avoidance, biohybrid robots based on insect cyborgs might not need sensors to detect obstacles or complicated algorithms to negotiate such impediments.
For biological studies of animal behavior, the robotic control of locomotion allows for systematic testing and exploration of neuromuscular controls, which would otherwise be limited to observations of natural animal behavior. This user control can expedite animal experiments, expand the parameters able to be tested, and lead to discoveries of enhanced capabilities in animals, such as modes of faster locomotion in jellyfish [172]. Similarly, insect-based cyborgs can be used to verify biological hypotheses by stimulating specific neuromuscular sites and manipulating motor patterns on insects' legs or wings [177]. For instance, cyborg insects have been used to test key hypotheses about flight control. Unlike most insects, flying beetles stretch out their forelegs and occasionally swing either leg during flight. Li et al hypothesized that the foreleg-swing observed during beetle flight was used to rotate the beetle's body and induce turning based on the conservation of angular momentum [178]. They tested this hypothesis by manipulating the forelegs via a miniature remote stimulator mounted onto flying beetles, in which the flying beetles turned when the forelegs were swung by the stimulation of leg muscles. In a similar study, the beetles' midlegs also attenuate wing beats [156].
Moreover, cyborg systems for invertebrates can allow opportunities for students to learn about neurobiology and locomotion in hands-on activities. RoboRoach, for example, is a commercially available toolkit for high school and college-level students to explore neurobiological concepts using live cockroaches. This offers opportunities in biology and robotics for outreach, education, and research purposes.
3. Current challenges
In the following sections, we identify some of the grand challenges facing the field of biohybrid robotics, including Design and Modeling, Fabrication, Control, and Moving the field beyond the lab. However, Microorganism Bots, Cyborgs, and Tissue Engineered biohybrid robots, while all biohybrid systems, each face unique challenges as well. Therefore, we introduce the overarching obstacles for each challenge area and then identify specific challenges and paths forward for each biohybrid robot class.
3.1. Design and modeling
One of the key challenges facing all classes of biohybrid robotics is the lack of unified or broadly adopted design and modeling tools. Biohybrid robotics face many of the modeling challenges of soft robotics while combining the stochasticity, unknowns, variability, and adaptability of biological systems. To address this challenge, researchers often develop their own device-specific mathematical or computational models [21, 38, 50, 119, 179–183]. This results in a high barrier of entry for new trainees to the field and makes forward design of new devices challenging. To facilitate reproducibility, lower barriers to participation in biohybrid robotics research, and improve the ability to predict device performance, collaborative development and refinement of biohybrid robot modeling tools are needed. To create such design and modeling tools, research is needed to understand the building blocks of each type of biohybrid system. By addressing these questions, improved design tools can be developed, leading to the creation of advanced biohybrid machines.
3.1.1. Microorganism bots
In modeling microorganism bots, design and modeling tools need to be able to capture not only the effect of actuation on an individual's motion but also the complex interactions observed in microorganism swarms. Data-driven methods are emerging as tools to provide statistical modeling of biohybrid robots but often require substantial datasets to generate [61].
3.1.2. Tissue-engineered biohybrid robots
For tissue-engineered robots, design tools need to be able to capture and predict the complex and sometimes stochastic nature of biological tissue formation. What underlying mechanisms and biological/biophysical principles govern tissue-engineered biohybrid robot formation, growth, and control? Evolutionary or primitive-based approaches, such as VoxelCAD [184] seek to overcome this barrier for tissue-engineered approaches, but broad adoption of specific tools has yet to be seen in the field.
3.1.3. Cyborgs
Design and modeling of cyborg biohybrid robots face many of the same challenges as modeling neuromuscular systems more broadly [185–188]. The organisms underlying the cyborg platform have many unknowns throughout their nervous system, including the exact connectivity and how the neural structure generates control. Additionally, models are needed to predict how control signals will generate changes in the animals' behavior. Design tools should also consider the possible effects that small microelectronic systems attached to cyborg platforms may have on the organism via load changes or proprioception. This is a particular consideration for aquatic designs, to account for the buoyancy and added mass of the system in variable density environments. Developing these design tools should be performed in close collaboration with neuroscientists and ethicists to ensure responsible research in the creation of future cyborgs.
3.2. Fabrication
Scalable and repeatable approaches for biohybrid robot fabrication provide a current barrier to the broader translation of biohybrid robots both for real-world applications and as tools for basic science. Well-defined and predictable function of biohybrid systems depends on tunability and repeatability in manufacturing these constructs, which remains a significant challenge in the field. Historically, individual researchers have often fabricated biohybrid robots in small numbers, resulting in fairly high variability.
3.2.1. Microorganism bots
At the level of microorganism-based devices, sensitivity to biomanufacturing process parameters [29, 189] and the lack of well-defined and predictable performance [40, 189] represent a significant challenge in the development of microbial biohybrid systems with precisely quantifiable therapeutic loads for drug delivery applications. Development of new biomanufacturing methods based on controlled self-assembly or other high throughput techniques to create precisely tailored microbial biohybrids is needed. Furthermore, it is now known that the assembly process parameters, conjugation chemistry, micro/nanoscale objects size, and quantity can affect the motility, chemotaxis, and growth characteristics in microbes [50, 189–191], are key to optimize the fabrication process. Establishing structure-function relationships in microbial biohybrids is another crucial area rarely explored.
3.2.2. Tissue-engineered biohybrid robots
For biohybrid robots composed of multicellular tissues, the ability to reliably and repeatable fabricate robots with consistent properties and behaviors remains a challenge. Advances in tissue engineering and bioprinting provide possible avenues for scalable manufacturing for multicellular and tissue-based biohybrid robots [16]. However, additional tools are needed to assess product quality and perform fabrication monitoring and control in real-time to ensure reliable fabrication.
3.2.3. Cyborgs
Many existing cyborg fabrication approaches rely on time-intensive manual fabrication of small electronic payloads and surgical implantation of these payloads on the organism at the heart of the cyborg biohybrid robot [140, 151, 192, 193]. Future research on cyborg fabrication should consider whether fabrication approaches should and can be scaled up, and whether modular systems can be used among multiple species. For example, geometric considerations among species with bilateral versus radial symmetry, or even different sizes among animals of the same species, can determine whether individual platforms should be tailored to each individual organism. Additionally, future research should identify how to reduce the invasiveness of cyborg approaches through the use of novel materials and interfaces.
3.3. Control
Different control challenges appear across the biohybrid robotic spectrum as you move from single-cell to multicellular engineered systems and again to cyborg animal augmentations.
3.3.1. Microorganism bots
Control of microbial biohybrid microrobots is challenging. Instead, emergent behaviors may need to be programmed considering the underlying biological system. Synthetic biology is increasingly integrated with biohybrid micro-robotics to obtain new capabilities and emergent behavior. It must be noted that the design-build-test-learn pipeline used in developing synthetic genetic circuits for specific performance characteristics is an iterative process that relies on experimental characterization of spatially homogeneous engineered cell suspensions. However, biohybrid swarms often distribute heterogeneously in complex environments with diverse transport boundary conditions, which will alter circuit performance [70]. Thus, synergistic integration of synthetic biology and system dynamic modeling is requisite for efficiently developing biohybrid systems with robust emergent behaviors. Multiscale computational models that interface molecular-scale models of synthetic genetic circuit behavior, with micro robotic agent-based swarm dynamics to describe the programmed emergent behavior of biohybrids, are critically needed to complement the standard experimental characterization of engineered cells. Such models not only inform synthetic gene circuit design but also allow for the evaluation of robustness and sensitivity of the biohybrids' cooperative behavior in silico. Many of the existing models for biohybrid microrobots are either computationally intensive detailed descriptions of individual agents [50, 183, 194, 195] or are carried out on the population scale [196] and unsuitable for low agent concentration applications such as in biomedical applications. Computationally efficient and generalizable multiscale computational frameworks that utilize experimental data to simulate the key behavior parameters (e.g. motility) useful to predict emergent behavior (e.g. chemotaxis or QS) in biohybrid robotic platforms, would be highly beneficial for the community. Such frameworks are particularly advantageous if they can operate on limited experimental data and are generalizable beyond the system for which they are developed [61].
3.3.2. Tissue-engineered biohybrid robots
Controlling multicellular biohybrid robots from engineered or explanted tissue systems depends on the tissues included in the device. If only muscle tissue is present as an actuator, the type of stimulation mechanisms employed may impact the fatigue and force output of the actuator. Common control modalities, such as pulsed electrical stimulation, require the presence of electrodes in the media or the use of a tether, thereby limiting the ability to translate robots beyond the lab. Recently, non-contact stimulation techniques using optogenetics have been deployed [17, 101], which reduce fatigue and permits local muscle actuation, but require the presence of an optrode and the use of genetically tractable cells. To date, control 'algorithms' using either approach have been simple feedforward pulsed stimulation, which limits the complexity of the robot performance. One approach to achieve more complex control is harnessing biological neurons' natural computation capabilities. Recent works have demonstrated that neuromuscular tissue circuits can be harvested [131] or grown [18, 179] to create basic motor systems for biohybrid robots. To achieve the full potential of such neuron-muscle systems, modeling and control approaches are needed to predict and modify the neural activity within these networks in response to external stimuli.
3.3.3. Cyborgs
The controllability of entire organisms presents additional challenges. One of the main disadvantages of cyborg approaches when compared to their purely robotic counterparts is reduced control and time constraints because of variations in endogenous animal behavior. For instance, a 'parasitic robot' to control a live turtle required a five week training period of positive reinforcement [142, 143]. RoboRoach and other cyborg insects have also demonstrated neuroplasticity in their abilities to resist repeated robotic control, thus requiring rest periods before robotic control of their locomotion was possible again. In contrast, jellyfish were able to follow repeated neuromuscular stimulations overnight, but were limited to a narrow frequency range between 0.25 and 1.00 Hz. At lower frequencies, the animals generated endogenous contractions because natural jellyfish behaviors were not arrested, and at higher frequencies, their range of motion was limited [139, 172]. Further work is needed to characterize and prevent, or at least circumvent, natural animal control and behavior for complete robotic control. Optogenetic approaches could offer one potential solution to address this challenge.
3.3.4. Controller implementation
Beyond the concept of triggering biological tissues and organisms to instigate natural behaviors, robust control strategies are an added challenge for living robots because of natural variability. Open-loop control systems, such as the use of microelectronic backpacks to stimulate invertebrates at pre-programmed pulse signals [27, 28, 139, 140, 144–168, 170], are useful to determine the capabilities and limitations of organismal species and individual subjects. However, without feedback in the loop, these biohybrid robotic systems are unable to adjust to unknown, unstructured environments. Thus, closed-loop control systems offer more utility to achieve complex tasks in variable environments. Such biohybrid systems require sensors, whether this entails biological systems that incorporate artificial sensors or robotic systems that incorporate biological sensors, i.e. insect antennae [127–130]. Alternatively, biological closed-loop control systems, e.g. QS in bacteria, can be engineered [197] to achieve robust and predictable response from swarms of microbial biohybrids [61]. These capabilities also rely on advancements in modeling and artificial intelligence, with one goal to create biohybrid robots driven by autonomous control strategies. However, the reliability and repeatability of inputs and outputs over time using biomaterials remains an open question to be addressed. More broadly, as described in [198], such control strategies are already an exigent challenge within soft robotics and other general robotic fields. Thus, advancements in control algorithms, machine learning, and sensors in robotics can improve their applications in biohybrid robots, and vice versa.
3.4. Moving beyond the lab
Of the biohybrid technologies reported here, perhaps cyborgs are the closest to translation beyond the lab. One motivation for using augmented animals is their ability to survive in the natural world. Biohybrid robots substantially reduce the energy cost of onboard batteries due to their low power needs in locomotion, as well as rendering some sensors that are typically necessary for artificial robots but superfluous in biohybrid systems because of their innate abilities, especially for obstacle detection and recognition. Therefore, biohybrid robots are especially close to translation toward applications such as search and rescue. For such operations beyond the laboratory, both artificial and biohybrid robots require autonomous locomotion, including automatic obstacle avoidance and wireless communication.
Existing biohybrid robotic insects have already been used to demonstrate search-and-rescue capabilities. One example is a tiny, low-power steerable camera integrated on insect cyborgs [199]. Additionally, a cockroach-based biohybrid robot has recently achieved autonomous locomotion in obstructed terrain, with onboard human detection using an infrared camera and wireless communication [159]. By integrating sensors and cameras onto the electronic boards of cyborg insects, these biohybrid robots can potentially find human victims trapped in rubble after natural disasters. In addition, cooperation with other locomotive systems, such as drones, will likely be needed to establish a network that covers both air and ground in disaster-affected areas [160, 161].
To cover aquatic environments, cyborg jellyfish and other invertebrates offer potential achievements for surveillance and studying the biogeochemistry of the ocean. Currently, demonstrations of biohybrid robotic jellyfish in real ocean environments have been limited to unidirectional swimming in coastal waters, with comparable swimming speed enhancements to laboratory results [139]. This is an initial step and proof of concept toward using cyborgs in complex, unstructured real-world aquatic environments. Future work can implement closed-loop feedback, more complicated maneuvering, and sensors to monitor and track markers of climate change in the ocean. Thus, by using common animal species naturally found in land, air, and sea environments, biohybrid approaches that take advantage of innate animal abilities can expedite the integration of robots into unpredictable real-world environments.
Cell- and tissue-based biohybrid systems also have potential for use beyond the lab, however more substantial challenges to translation exist that for cyborg robots. For example, additional support systems may be needed to maintain tissues for long-term missions, and protective housings will need to prevent bacterial or enzymatic degradation of living components. Therefore, in cell- or tissue-based biohybrid systems where cells are isolated from a host, longevity, safety, and biocontainment issues should be considered as well.
4. The future of biohybrid robotics
4.1. Models for biology
Biohybrid robotics can both inform and leverage our understanding of biological systems. The absence of the fundamental laws of biology are a challenge in developing a hierarchal understanding of physiology. Biohybrid actuators, where a biological construct is coupled with a simple, synthetic substrate, are amenable to modeling thru our understanding of the abiotic material science. Thus, these devices can be viewed as model systems of the constituent tissues within a system which is often times motile. Although the field is in its infancy, the systems offer a granular understanding of the spatiotemporal dynamics of biological systems that have, to date, ranged from micron-scale sarcomere dynamics to centimeter-scale directed displacements.
4.1.1. Cardiovascular models
Cardiovascular engineering is one area in which biohybrid robotics has recently excelled with biohybrid robots as models for biology. Explored under the premise that there are a set of fundamental laws of muscular pumps, bio-inspired systems that replicate the pumping of marine lifeforms with mammalian cardiac myocytes as actuators have demonstrated design themes conserved across species and organs.
The ability of biohybrid robots to provide controlled engineered platforms for testing specific biological hypotheses has helped demonstrate the ability to engineer specific contraction patterns into cardiac tissues based on regional patterning [26] and demonstrated the importance of electro-mechanical coupling in cyclic contractions of neighboring engineered cardiac tissues [25]. This is important, because some cardiovascular diseases, such as diastolic heart failure, may stem from a historical misunderstanding of the refilling of the ventricular cavities after systole. Biohybrid robotics may offer a valuable tool for studying muscular pumps and suction, with the opportunity to challenge the canon of cardiovascular physiology which fails, still, to explain some of the most common causes of heart disease.
4.1.2. Neuromuscular control models
The use of biohybrid robots with neuromuscular circuits or through augmented animals allows for a more systematic method to perform parameter sweeps to understand control instead of relying on natural animal behavior or theoretical modeling alone. Biohybrid tools offer an intermediary approach that can complement and connect results from neuroscience, live animal experiments, robotic experiments that use robots as physical models, and computational tools. As more scalable and reproducible fabrication approaches are developed, biohybrid devices may also be used as patient-specific models for studying neuromuscular diseases or pathologies.
4.2. Search and rescue
As we consider future applications of biohybrid robotics beyond the lab, one of the first areas that may see widespread use of such devices is in search and rescue. Search and rescue has an immediate and pressing need for small-scale mobile devices with long battery life, the ability to safely navigate dangerous rubble fields, and the ability to sustain operation in environments where hazardous chemicals and gasses may be present. Current search and rescue approaches rely on human and dog teams and heavy construction equipment and can be hindered by environmental conditions. Of the biohybrid robot technologies, cyborg systems show great potential in search and rescue operations. These small-scale devices can be produced en masse at low cost, and the required electronic payloads can even be powered by an insect's own hemolymph. By harnessing highly robust organisms such as cockroaches, these systems can operate without food or even water for long periods. Future research and development are needed to translate and scale up this technology and develop interfaces for trained search and rescue operators to control cyborg swarms. However, the translation readiness level of this approach lends itself to use beyond the lab in the next five to ten years with proper support.
4.3. Tools for environmental monitoring
Many biohybrid approaches have possible applications in environmental monitoring. For example, the external control of invertebrate locomotion and technological advances to reduce sensor payloads allow the possibility of integrating wireless sensors onto animals for use in environmental applications. Such living machines include bees with electronic backpacks [200], with the potential to study pollination patterns and tree canopy mapping, and biohybrid robotic jellyfish [139, 200], which have the potential to reach small crevices and approach areas with sensitive marine life beyond the limits of existing technologies. Thus, insect cyborgs offer the potential for environmental monitoring on land, and aquatic cyborgs offer the potential to explore a wider range of ocean environments. Additionally, as tissue-engineered approaches advance, it will become possible to grow robots from robust tissues for environmental applications. Already, devices capable of operating in the air have been produced in this space [201], although they have yet to be translated beyond the lab.
To achieve environmental monitoring with biohybrid robots, further research is needed to develop and incorporate advanced microelectronic devices, including cameras and sensors with increased capabilities and decreased payloads, into biohybrid systems. Precise trajectory planning, tracking, and wireless communication are also major focal points for deploying living machines in the field. Finally, more work is needed to plan how biohybrid robots can interact with real-world environments safely and responsibly. One advantage of biohybrid robotics over traditional approaches is the use of naturally renewable and biocompatible materials, whether through engineered tissues or cyborg systems. To prevent electronic and plastic waste in the ocean, any peripheral components or structures needed for living machines should seek to incorporate more biodegradable components and be designed with contingency plans for potential loss of the device in the field.
4.4. Integration of novel materials
As researchers seek to create more complex, autonomous, and even tether-free biohybrid robots, new materials for stimulation, energy storage, and even energy capture will be needed. An up-and-coming class of materials for the integration of thin, lightweight, and flexible, functional components are 2D materials. Integration of 2D material based nanoelectronics can enable several functionalities ranging from sensing, logic and signal processing to energy storage, forming a fully functional, standalone micro-robotic unit. 2D materials, owing to their ultra-thin nature and flexibility can conformally adhere to flexible robotic surfaces, and allow fabrication of nano electronic devices. 2D materials exhibit several exotic properties absent in bulk materials, like large surface to volume ratio, electrostatic and layer dependent tunability of transport and magnetic properties. Also, proximity effect induced orders and ability to form heterostructures with clean interfaces, providing unrivalled integrability and design sovereignty. Excellent electron transport properties and high carrier mobilities of graphene and direct bandgap semiconductors like transition metal dichalcogenides and black phosphorus have been employed for building photodetectors and photovoltaic devices while piezoelectricity has been demonstrated in materials like MoS2. These capabilities allow tetherless energy harvesting in the micro-robots using optical and acoustic stimulation. Additionally, electric double-layer capacitors (or supercapacitors) based on graphene are already being developed in industries for high-density energy storage with fast charging capabilities. Thus, 2D materials can allow integration of logic and analog signal processing circuits, along with energy storage integrated with microscale biohybrid robotic platforms.
4.5. Legal and ethical issues
The addition of biological components in robotics adds further ethical considerations, including the ethics of augmenting or perturbing microbes and animals, tissue engineering, robots and their interactions with the natural world, and environmental stewardship. Previous critiques of synthetic biology [202] and invertebrate research [171] have focused on concerns of welfare and the slippery slopes of more extreme experiments and using higher-order animals.
The safe deployment of microbial biohybrid systems requires forward-thinking plans and careful consideration of parameters such as bacterial mutation over time, horizontal gene transfer, and implementation of biocontainment measures [203, 204]. All microbial works should be conducted in facilities with appropriate biosafety compliance according to the NIH biosafety and recombinant DNA policy, with approval from the Institutional Biosafety Committees.
Future animal work, including cyborg development and harvesting of materials for biohybrid robots, even for species not protected under the guidance of formal ethical committees, such as the Institutional Animal Care and Use Committee (IACUC), should conduct a cost-benefit analysis to the animal subjects and use the principles of minimization and restraint, in alignment with the 4Rs: reduction, replacement, refinement, and reproducibility [171]. Additional concerns are present to perform experiments on vertebrates and other higher-order animals, which should be conducted in accordance institutional guidelines.
Introducing cyborg animals or biohybrid robots as search-and-rescue or monitoring tools in the real world also presents new ethical considerations regarding environmental stewardship. Challenges include controlling living robots in complex and unstructured environments and addressing both intended and unintended consequences of deploying these robots in the natural world. To predict and address potential concerns, further discussions between scientists and ethics experts should be conducted.
5. Conclusions
The past ten years of biohybrid robotics research have seen tremendous advances within the field. To sustain the growing interest and research in this area, the community will need to overcome key challenges in biohybrid robot design and modeling, scalable fabrication, autonomous control, and the translation of biohybrid robots beyond the lab. Addressing these challenges will future broaden the accessibility of biohybrid robotic technologies and demonstrate their utility not only for basic and fundamental research but also as robotic systems. Building on the foundation of biohybrid research over the past ten years, addressing these challenges will ensure that biohybrid robotic systems have a strong future with applications as models for biological research, tools for environmental monitoring, and platforms for search and rescue. To achieve these goals, sustained support for this interdisciplinary field, further expansion of the disciplines engaging in biohybrid robotics, and recruitment of relevant stakeholders for future translation are needed.
Acknowledgments
The authors would like to thank the Convergent Science Network and Living Machines organizers for the opportunity to collaborate on this perspectives article. The work was partially supported by the National Science Foundation CAREER award program Grant No. ECCS-2044785, Beatriu de Pinós Programme (2018-BP-00305), The Ministry of Business and Knowledge of the Government of Catalonia, The Spanish Ministry of Science through the Ramón y Cajal Grant, RYC2020-030119-I CERCA Programme/Generalitat de Catalunya, Japan Society for the Promotion of Science KAKENHI Grant No. JP18H05467, The European Union's Horizon 2020 research and innovation programme (HORIZON-CL4-2021-DIGITAL-EMERGING-01-27), Singapore Ministry of Education (RG140/20).
Data availability statement
No new data were created or analyzed in this study.