



Abstract
The uncertainty principle is an important tenet and active field of research in quantum physics. Information-theoretic uncertainty relations, formulated using entropies, provide one approach to quantifying the extent to which two non-commuting observables can be jointly measured. Recent theoretical analysis predicts that general quantum measurements are necessary to saturate some such uncertainty relations and thereby overcome certain limitations of projective measurements. Here, we experimentally test a tight information-theoretic measurement uncertainty relation with neutron spin- qubits. The noise associated to the measurement of an observable is defined via conditional Shannon entropies and a tradeoff relation between the noises for two arbitrary spin observables is demonstrated. The optimal bound of this tradeoff is experimentally obtained for various non-commuting spin observables. For some of these observables this lower bound can be reached with projective measurements, but we observe that, in other cases, the tradeoff is only saturated by general quantum measurements (i.e. positive-operator valued measures) as predicted theoretically. These results showcase experimentally the advantage obtainable by general quantum measurements over projective measurements when probing certain uncertainty relations.
qubits. The noise associated to the measurement of an observable is defined via conditional Shannon entropies and a tradeoff relation between the noises for two arbitrary spin observables is demonstrated. The optimal bound of this tradeoff is experimentally obtained for various non-commuting spin observables. For some of these observables this lower bound can be reached with projective measurements, but we observe that, in other cases, the tradeoff is only saturated by general quantum measurements (i.e. positive-operator valued measures) as predicted theoretically. These results showcase experimentally the advantage obtainable by general quantum measurements over projective measurements when probing certain uncertainty relations.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 3.0 licence. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
The uncertainty principle was one of the first quantum phenomena discovered without any classical analog. In 1927 Heisenberg presented his γ-ray microscope Gedankenexperiment [1] demonstrating that the position and momentum of an electron cannot be determined simultaneously with arbitrary precision. The famous uncertainty relation  for position Q and momentum P [2], however, quantifies the accuracy with which a state can be prepared with respect to the observables of interest, rather than the ability to jointly measure them. For several decades, research on the uncertainty principle focused on such so-called preparation uncertainty relations.
for position Q and momentum P [2], however, quantifies the accuracy with which a state can be prepared with respect to the observables of interest, rather than the ability to jointly measure them. For several decades, research on the uncertainty principle focused on such so-called preparation uncertainty relations.
The advent of information theory provided novel approaches to quantifying uncertainty, such as the Shannon entropy [3], with wide-ranging applications [4]; consequently, entropic uncertainty relations were formulated soon thereafter [5–7]. For finite dimensional systems, novel entropic relations such as Deutsch's [8] and Maassen and Uffink's inequalities [9] presented advantages, such as state-independence, over Robertson's relation ![${\rm{\Delta }}(A){\rm{\Delta }}(B)\geqslant \left|\tfrac{1}{2i}\langle \psi | [A,B]| \psi \rangle \right|$](https://content.cld.iop.org/journals/1367-2630/21/1/013038/revision2/njpaafeebieqn3.gif) , for arbitrary observables A and B and any state
, for arbitrary observables A and B and any state  [10]. Entropic uncertainty relations have subsequently proven useful in quantum cryptography [11, 12], entanglement witnessing [13], complementarity [14] and other topics in quantum information theory [15], where entropy is a natural quantity of interest.
[10]. Entropic uncertainty relations have subsequently proven useful in quantum cryptography [11, 12], entanglement witnessing [13], complementarity [14] and other topics in quantum information theory [15], where entropy is a natural quantity of interest.
In recent years measurement uncertainty relations, in the spirit of Heisenberg's original proposal, have received renewed attention. Such uncertainty relations can be subdivided into two classes: noise-disturbance relations, which quantify the idea that the more accurately a measurement determines the value of an observable, the more it disturbs the state of the measured system; and noise–noise relations, which quantify the tradeoff between how accurately a measurement can jointly determine the values of two non-commuting observables. New measures and relations for noise and disturbance have been proposed [16, 17], refined [18, 19], and subjected to experimental tests [20–28]. Initially, proposed ways to quantify noise and disturbance focused on distance measures between target observables and measurements [16] or the associated probability distributions [29]. More recently, interest has grown in information-theoretic measures, introduced first by Buscemi et al [30], but also in several subsequent alternative approaches [31–34]. A major challenge in the study of entropic measurement uncertainty relations is to determine how tight they are. This can be difficult for even the simplest systems, as demonstrated in [35], where an allegedly tight noise-disturbance relation for orthogonal qubit observables was given and tested experimentally. Subsequently, however, a counterexample was found [36], showing that the relation can be violated by non-projective measurements. In this article we focus on related noise–noise uncertainty relations, experimentally testing the noise–noise tradeoff for a range of (not necessarily orthogonal) Pauli observables. By implementing four-outcome general quantum measurements we saturate tight noise–noise relations, thereby improving upon previous experiments with projective measurements [35].
2. Theoretical framework
To formally study measurement uncertainty relations one must define measures for two key properties of a measurement device  (which may in general implement an arbitrary quantum measurement with any number of outcomes): how accurately it measures a target observable A (its noise), and how much it disturbs the quantum state during measurement (the disturbance). Here we are interested in noise–noise uncertainty relations and therefore restrict our discussion to the former.
(which may in general implement an arbitrary quantum measurement with any number of outcomes): how accurately it measures a target observable A (its noise), and how much it disturbs the quantum state during measurement (the disturbance). Here we are interested in noise–noise uncertainty relations and therefore restrict our discussion to the former.
While several definitions of noise have previously been studied theoretically and experimentally, we utilize the information-theoretic approach of [30], formulated as follows. Let  be the d eigenstates of the d-dimensional target observable A and represent
be the d eigenstates of the d-dimensional target observable A and represent  as a positive-operator valued measure (POVM)
as a positive-operator valued measure (POVM)  [15]. The noise is defined in the following scenario: the eigenstates of A are randomly prepared with probability
[15]. The noise is defined in the following scenario: the eigenstates of A are randomly prepared with probability  before
before  is measured, producing an outcome m with probability
is measured, producing an outcome m with probability  . If
. If  accurately measures A then the value of m should allow one to determine a; if the measurement is noisy, m yields less information about a. This noise is quantified in terms of the conditional Shannon entropy: denoting the random variables associated with a and m as
accurately measures A then the value of m should allow one to determine a; if the measurement is noisy, m yields less information about a. This noise is quantified in terms of the conditional Shannon entropy: denoting the random variables associated with a and m as  and
and  , respectively, the noise of
, respectively, the noise of  on A is [30]
on A is [30]

where  and
and  can be calculated from Bayes' theorem4
.
can be calculated from Bayes' theorem4
.
If A and B are two non-commuting observables, the noises  and
and  (defined similarly) cannot both be zero. Subsequently, there is a tradeoff between these quantities which can be expressed by uncertainty relations, e.g. [9, 30]
(defined similarly) cannot both be zero. Subsequently, there is a tradeoff between these quantities which can be expressed by uncertainty relations, e.g. [9, 30]

but such relations are often far from tight. More comprehensively, one may look to completely characterize the set

of obtainable noise values.
Recently, it has been shown [36] that for qubit measurements one has R(A, B) = conv E(A, B), where conv denotes the convex hull and E(A, B) is the set of obtainable entropic preparation uncertainty values for A and B (see appendix A). This relation, derived in [37], allows one to characterize and experimentally probe R(A, B). For projective qubit measurements, it turns out that one can obtain precisely the noise values in E(A, B), but (if A and B are such that E(A, B) is non-convex) the noise values in R(A, B)\E(A, B) can only be obtained by non-projective measurements [36].
Focusing on Pauli observables  and
and  [with
[with  two unit vectors on the Bloch sphere and
two unit vectors on the Bloch sphere and  = (σx, σy, σz)], one has
= (σx, σy, σz)], one has

where g is the inverse of the binary entropy function h(x) defined for x ∈ [0, 1] as

When  is convex and the entire region R(A, B) can be obtained by projective measurements; for
is convex and the entire region R(A, B) can be obtained by projective measurements; for  it is non-convex [37–39] and saturating the noise–noise tradeoff requires four-outcome POVMs [36] (see appendix A for further theoretical details).
it is non-convex [37–39] and saturating the noise–noise tradeoff requires four-outcome POVMs [36] (see appendix A for further theoretical details).
3. Experimental procedure
In this work, we describe an experiment probing the noise–noise tradeoff between Pauli observables A and B using neutron spin qubits. Neutrons are ideal test objects for foundational experiments, since they are described by matter waves whose polarization and trajectories can be accurately manipulated and efficiently detected.
The neutrons in our experiment are produced at the TRIGA Mark-II reactor of the Vienna University of Technology, where they are monochromatized to an average wavelength of λ = 2.02 Å and polarized by reflection on a Co–Ti supermirror. The particles entering the beam line are guided by a vertical magnetic field determining the quantization axis and specifying the incident spin as  , the eigenvector of σz. The noise–noise tradeoff is then probed by implementing POVMs of the form
, the eigenvector of σz. The noise–noise tradeoff is then probed by implementing POVMs of the form

where  , and the
, and the  are unit vectors on the Bloch sphere parametrized by the spherical coordinates
are unit vectors on the Bloch sphere parametrized by the spherical coordinates  . For q = 1, equation (6) reduces to a single projective spin measurement along the direction
. For q = 1, equation (6) reduces to a single projective spin measurement along the direction  , see figure 1(a), while for a value of q between 0 and 1 it corresponds to a mixture of projective measurements along the directions
, see figure 1(a), while for a value of q between 0 and 1 it corresponds to a mixture of projective measurements along the directions  and
and  with probabilities q and
with probabilities q and  , see figure 1(b).
, see figure 1(b).
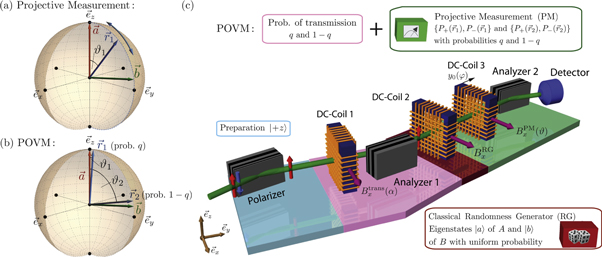
Figure 1. (a), (b) Measurement strategies. The vector  in the Bloch sphere (a) represents a projective measurement of the observable
in the Bloch sphere (a) represents a projective measurement of the observable  . The vectors
. The vectors  and
and  in (b) represent the projective measurements that are mixed with probabilities q and
in (b) represent the projective measurements that are mixed with probabilities q and  to realize the POVM
to realize the POVM  of equation (6). (c) Neutron polarimeter setup of the measurement. The red arrow indicating the state
of equation (6). (c) Neutron polarimeter setup of the measurement. The red arrow indicating the state  is rotated in DC-Coil 1 by applying a magnetic field
is rotated in DC-Coil 1 by applying a magnetic field  , before passing Analyzer 1, which projects the state onto
, before passing Analyzer 1, which projects the state onto  , with probability q or
, with probability q or  (depending on α). A random number generator then selects a magnetic field
(depending on α). A random number generator then selects a magnetic field  to apply in DC-Coil 2, which prepares one of the eigenstates
to apply in DC-Coil 2, which prepares one of the eigenstates  of A and B. Finally, the third magnetic field
of A and B. Finally, the third magnetic field  in DC-Coil 3 and Analyzer 2 realize a projective measurement in the direction
in DC-Coil 3 and Analyzer 2 realize a projective measurement in the direction  on the neutrons passing Analyzer 1 with probability q, or in the direction
on the neutrons passing Analyzer 1 with probability q, or in the direction  on the ensemble transmitted with probability
on the ensemble transmitted with probability  . The measurement direction
. The measurement direction  can be brought out of the
can be brought out of the  -plane by displacing DC-Coil 3 by
-plane by displacing DC-Coil 3 by  . For further details, see appendix B.
. For further details, see appendix B.
Download figure:
Standard image High-resolution imageTo perform the required measurements, an experimental setup (see figure 1(c)) similar to that in [22] is employed. The individual elements of the POVM are successively measured allowing the statistics for the whole POVM to be reconstructed. To this end, the initial spins are first rotated by DC-Coil 1 before being transmitted through Analyzer 1 with probabilities  depending on the incident angle of spin states. After Analyzer 1, one of the observables' eigenstates
depending on the incident angle of spin states. After Analyzer 1, one of the observables' eigenstates  or
or  (with eigenvalues a, b = ±1) is generated uniformly at random by inducing an appropriately chosen rotation at DC-Coil 2. DC-Coil 3 is set so that the incoming neutrons pass Analyzer 2 with probabilities
(with eigenvalues a, b = ±1) is generated uniformly at random by inducing an appropriately chosen rotation at DC-Coil 2. DC-Coil 3 is set so that the incoming neutrons pass Analyzer 2 with probabilities ![$q\mathrm{Tr}[{P}_{\pm }({\vec{r}}_{1})| a\rangle \langle a| ]$](https://content.cld.iop.org/journals/1367-2630/21/1/013038/revision2/njpaafeebieqn59.gif) or
or ![$(1-q)\mathrm{Tr}[{P}_{\pm }({\vec{r}}_{2})| a\rangle \langle a| ]$](https://content.cld.iop.org/journals/1367-2630/21/1/013038/revision2/njpaafeebieqn60.gif) , and likewise for the
, and likewise for the  eigenstates. At the end of the beam line a boron trifluoride detector registers all incoming neutrons so that, given these settings, one of
eigenstates. At the end of the beam line a boron trifluoride detector registers all incoming neutrons so that, given these settings, one of  or
or  is measured; each detection for one of these 4 measurement operators corresponds to a different outcome m. We thereby record the counts Ia,m of measuring outcome m when
is measured; each detection for one of these 4 measurement operators corresponds to a different outcome m. We thereby record the counts Ia,m of measuring outcome m when  is prepared, and similarly for Ib,m, and estimate the probabilities
is prepared, and similarly for Ib,m, and estimate the probabilities  and
and  (under a standard fair-sampling assumption), permitting the noises
(under a standard fair-sampling assumption), permitting the noises  and
and  to be calculated from equation (1).
to be calculated from equation (1).
3.1. Results
To obtain all the relevant results the following procedure is applied. We take  (the unit vector in the z direction) and choose
(the unit vector in the z direction) and choose  in the yz-plane, thus determining the value
in the yz-plane, thus determining the value  characterizing the noise–noise tradeoff. We initially take q = 1 so that the projectors
characterizing the noise–noise tradeoff. We initially take q = 1 so that the projectors  are measured on the entire neutron ensemble. The vector
are measured on the entire neutron ensemble. The vector  is rotated in the interval
is rotated in the interval ![${\vartheta }_{1}\in [0^\circ ,180^\circ ]$](https://content.cld.iop.org/journals/1367-2630/21/1/013038/revision2/njpaafeebieqn74.gif) with increments of Δϑ1 ≃ 10° (see figure 1(a)). The variation of the polar angle changes the probabilities of passing Analyzers 1 and 2 and reaching the detector, and thus of
with increments of Δϑ1 ≃ 10° (see figure 1(a)). The variation of the polar angle changes the probabilities of passing Analyzers 1 and 2 and reaching the detector, and thus of  and
and  . When ϑ1 = 0 the projectors are
. When ϑ1 = 0 the projectors are  and the probability
and the probability  is maximally peaked, while
is maximally peaked, while  is evenly distributed. For
is evenly distributed. For  the situation is exactly reversed. When
the situation is exactly reversed. When  is in between
is in between  and
and  , these measurements attain the lower-left boundary of E(A, B) and are optimal amongst projective measurements. The upper-right boundaries of E(A, B) can, for completeness, be obtained by rotating
, these measurements attain the lower-left boundary of E(A, B) and are optimal amongst projective measurements. The upper-right boundaries of E(A, B) can, for completeness, be obtained by rotating  out of the plane spanned by
out of the plane spanned by  and
and  by an azimuthal angle φ1 (varied experimentally by displacing DC-Coil 3, see figure 1(c)), increasing the noise with respect to both A and B (figures 2 and 3).
by an azimuthal angle φ1 (varied experimentally by displacing DC-Coil 3, see figure 1(c)), increasing the noise with respect to both A and B (figures 2 and 3).

Figure 2. Plots of the noise–noise regions R(A, B) for 
 with (a)
with (a)  , (b)
, (b)  and (c)
and (c)  . The shaded noise–noise regions are separated here into two areas. The purple area shows the region E(A, B) reachable by projective measurements; the blue data points are measured in the
. The shaded noise–noise regions are separated here into two areas. The purple area shows the region E(A, B) reachable by projective measurements; the blue data points are measured in the  -plane (
-plane ( ) starting from ϑ1 = 0 (
) starting from ϑ1 = 0 ( ) and increasing in steps of Δϑ1 = 10°. When
) and increasing in steps of Δϑ1 = 10°. When  the noise is symmetric around ϑ1 = π/2; otherwise, the closed blue curve is obtained. The purple points are obtained by taking q = 1 and rotating
the noise is symmetric around ϑ1 = π/2; otherwise, the closed blue curve is obtained. The purple points are obtained by taking q = 1 and rotating  (top boundary) and
(top boundary) and  (right boundary) out of the
(right boundary) out of the  -plane by increasing the azimuthal angle φ1. The orange area corresponds to R(A, B)\E(A, B), and the noise–noise values inside it can only be reached by POVMs; the points on its lower-left linear boundary can be obtained by a four-outcome POVM realized as a mixture of two projective measurements along some fixed directions
-plane by increasing the azimuthal angle φ1. The orange area corresponds to R(A, B)\E(A, B), and the noise–noise values inside it can only be reached by POVMs; the points on its lower-left linear boundary can be obtained by a four-outcome POVM realized as a mixture of two projective measurements along some fixed directions  and
and  , with varying values of q, see equation (6) and figure 1(b). Outside of these regions, the values of
, with varying values of q, see equation (6) and figure 1(b). Outside of these regions, the values of  in the hatched areas are forbidden and cannot be reached by any quantum measurement. Error bars correspond to one standard deviation arising from the Poissonian statistics of the neutron count rate.
in the hatched areas are forbidden and cannot be reached by any quantum measurement. Error bars correspond to one standard deviation arising from the Poissonian statistics of the neutron count rate.
Download figure:
Standard image High-resolution image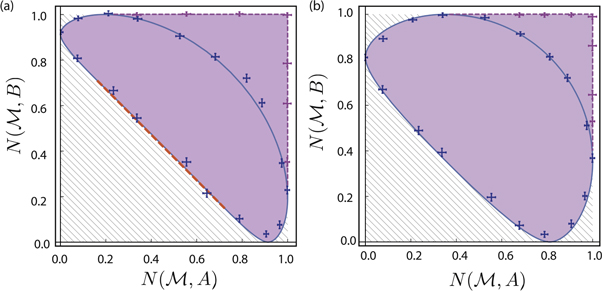
Figure 3. Plots of the noise–noise regions  with (a)
with (a)  , and (b)
, and (b)  . These cases are on either side of the value
. These cases are on either side of the value  at which E(A, B) becomes convex. In (a), due to the size of the error bars (as specified in figure 2), improvements beyond projective measurements to obtain noise values on the orange dashed line are experimentally no longer possible, while in (b) the optimal theoretical tradeoff is already attained with projective measurements.
at which E(A, B) becomes convex. In (a), due to the size of the error bars (as specified in figure 2), improvements beyond projective measurements to obtain noise values on the orange dashed line are experimentally no longer possible, while in (b) the optimal theoretical tradeoff is already attained with projective measurements.
Download figure:
Standard image High-resolution imageFor  projective measurements are optimal and this approach saturates the noise–noise tradeoff. This is no longer true for
projective measurements are optimal and this approach saturates the noise–noise tradeoff. This is no longer true for  and the noise may be decreased further by non-projective measurements. To saturate the tradeoff and attain the lower-left boundary of
and the noise may be decreased further by non-projective measurements. To saturate the tradeoff and attain the lower-left boundary of  the mixing parameter q is varied to implement the full four-outcome POVM
the mixing parameter q is varied to implement the full four-outcome POVM  . This is done by mixing the statistics obtained by the projectors
. This is done by mixing the statistics obtained by the projectors  and
and  , where the polar angles ϑ1 and ϑ2, associated with
, where the polar angles ϑ1 and ϑ2, associated with  , are determined by the projective measurements
, are determined by the projective measurements  minimizing
minimizing  . With these angles fixed (giving vectors
. With these angles fixed (giving vectors  and
and  between
between  and
and  , symmetric about their angle bisector; see figure 1(b)), a range of POVMs are implemented by varying q, i.e. changing the ratio of transmitted neutrons in Analyzer 1, by Δq ≃ 0.1. These measurements attain the boundary of the orange noise–noise region R(A, B) in figure 2.
, symmetric about their angle bisector; see figure 1(b)), a range of POVMs are implemented by varying q, i.e. changing the ratio of transmitted neutrons in Analyzer 1, by Δq ≃ 0.1. These measurements attain the boundary of the orange noise–noise region R(A, B) in figure 2.
The measurement results for three different vectors  (for which E(A, B) is non-convex) are given in figure 2, with (a)
(for which E(A, B) is non-convex) are given in figure 2, with (a)  , (b)
, (b)  and (c)
and (c)  . The noise–noise region R(A, B) is broken into two subregions: the purple region E(A, B) of values attainable with projective measurements, and the orange region R(A, B)\E(A, B). The closed blue curve shows the values attainable by projective measurements in the
. The noise–noise region R(A, B) is broken into two subregions: the purple region E(A, B) of values attainable with projective measurements, and the orange region R(A, B)\E(A, B). The closed blue curve shows the values attainable by projective measurements in the  -plane, while the dashed orange line shows the optimal values attainable with POVMs. In figure 2(a),
-plane, while the dashed orange line shows the optimal values attainable with POVMs. In figure 2(a),  is perpendicular to
is perpendicular to  and projective measurements
and projective measurements  in the
in the  -plane give noise values that lie on the lower-left boundary (blue curve) of E(A, B). To saturate the noise–noise tradeoff, we mix projective measurements in directions
-plane give noise values that lie on the lower-left boundary (blue curve) of E(A, B). To saturate the noise–noise tradeoff, we mix projective measurements in directions  and
and  . The resulting points are color coded from red (q = 0) to orange (q = 1). We see that POVMs give a considerable improvement on the uncertainty relation over projective measurements, which previous experiments had been restricted to [35]. For instance, for the data point corresponding to q ≃ 0.494 on figure 2(a), we obtain noise values of
. The resulting points are color coded from red (q = 0) to orange (q = 1). We see that POVMs give a considerable improvement on the uncertainty relation over projective measurements, which previous experiments had been restricted to [35]. For instance, for the data point corresponding to q ≃ 0.494 on figure 2(a), we obtain noise values of  . This violates the relation
. This violates the relation  satisfied by all projective measurements (corresponding to the lower boundary of the purple region E(A, B), see appendix A), by more than 6 standard deviations. When the eigenstates of B approach those of A, as is the case in figure 2(b), the lower boundary of R(A, B) (orange) and, more noticeably the purple region E(A, B) start shifting downwards. This becomes more apparent in figure 2(c), where the optimal choice of
satisfied by all projective measurements (corresponding to the lower boundary of the purple region E(A, B), see appendix A), by more than 6 standard deviations. When the eigenstates of B approach those of A, as is the case in figure 2(b), the lower boundary of R(A, B) (orange) and, more noticeably the purple region E(A, B) start shifting downwards. This becomes more apparent in figure 2(c), where the optimal choice of  and
and  to mix is obtained for the projective measurements giving
to mix is obtained for the projective measurements giving  and
and  , respectively, corresponding to ϑ1 ≃ 5° and ϑ2 ≃ 74° (
, respectively, corresponding to ϑ1 ≃ 5° and ϑ2 ≃ 74° ( ). By realizing the POVM accordingly for a range of q values we again succeed in saturating the noise–noise tradeoff. (See appendix C for further quantitative details of the measurements.)
). By realizing the POVM accordingly for a range of q values we again succeed in saturating the noise–noise tradeoff. (See appendix C for further quantitative details of the measurements.)
In figure 3 we present two cases with inner products (a)  and (b)
and (b)  , on either side of the critical value of
, on either side of the critical value of  at which the region E(A, B) becomes convex. In figure 3(a) the dashed orange line from
at which the region E(A, B) becomes convex. In figure 3(a) the dashed orange line from  to (0.70, 0.17) implies that projective measurements are theoretically incapable of saturating the noise–noise tradeoff, but improvements by POVMs are no longer resolvable in our experiment. In figure 3(b) the region R(A, B) is already convex and can be fully attained with projective measurements, hence improvements by general POVMs are no longer possible.
to (0.70, 0.17) implies that projective measurements are theoretically incapable of saturating the noise–noise tradeoff, but improvements by POVMs are no longer resolvable in our experiment. In figure 3(b) the region R(A, B) is already convex and can be fully attained with projective measurements, hence improvements by general POVMs are no longer possible.
4. Discussion
A measurement device cannot jointly measure two non-commuting observables with arbitrary precision, and thus there is a tradeoff between the accuracy with which they can both be measured, captured by noise–noise uncertainty relations. Using a definition of noise that quantifies how well a measurement device can distinguish eigenstates of non-commuting observables [30], we experimentally tested tight entropic noise–noise uncertainty relations for qubits [36] for various pairs of Pauli spin observables. For closely aligned observables, we saw that the uncertainty relation could be saturated with simple projective measurements. However, we verified experimentally that this is not generally the case and that four-outcome POVMs yield better measurement results that saturate the uncertainty relation when projective measurements cannot. It is interesting to note that advantages accorded by POVMs over projective measurements have also been reported for other features of measurements [40], and it would be interesting to clarify this connection further in the future. Our study, which focused on noise–noise relations, paves the way for further experiments testing entropic noise-disturbance relations [30]. For such relations on qubit systems general quantum measurements again offer advantages over projective measurements, but their experimental realization necessitates the implementation of non-trivial post-measurement transformations on the measured states [36].
Acknowledgments
BD, SS and YH acknowledge support by the Austrian science fund (FWF) Projects No. P30677-N20 and No. P27666-N20. AA and CB acknowledge financial support from the Retour Post-Doctorants program (ANR-13-PDOC-0026) of the French National Research Agency.
Appendix A.: Theoretical framework
Let us first give a more detailed presentation of the framework in which the information-theoretical noise is defined, as well as on the form of the regions R(A, B) and E(A, B). Further details can be found in [30, 36].
A.1. Operational scenario defining information-theoretic noise
The most general model of a quantum measurement is that of a quantum instrument, which completely describes both the statistics of a measurement and the transformation it induces on the measured system. To define the noise, however, only the statistics (and not the transformation) are of interest to us, and these can be described by a POVM. Recall that a POVM  is a collection
is a collection  of Hermitian positive semidefinite operators Mm satisfying
of Hermitian positive semidefinite operators Mm satisfying  , where
, where  is the identity operator. For a given quantum state ρ, the probability of obtaining outcome m is
is the identity operator. For a given quantum state ρ, the probability of obtaining outcome m is ![$\mathrm{Tr}[{M}_{m}\rho ]$](https://content.cld.iop.org/journals/1367-2630/21/1/013038/revision2/njpaafeebieqn145.gif) .
.
The information-theoretic definition of noise  is best understood in the operational framework described in the main text, and illustrated in figure A1 below. For simplicity, let A be a d-dimensional non-degenerate observable with eigenstates
is best understood in the operational framework described in the main text, and illustrated in figure A1 below. For simplicity, let A be a d-dimensional non-degenerate observable with eigenstates  . The operational scenario can be seen as an experiment in which the eigenstates
. The operational scenario can be seen as an experiment in which the eigenstates  are prepared uniformly at random, i.e. with probability
are prepared uniformly at random, i.e. with probability  , before being measured by
, before being measured by  . The result of the measurement is the outcome m with probability
. The result of the measurement is the outcome m with probability ![$p(m| a)=\mathrm{Tr}[{M}_{m}| a\rangle \langle a| ];$](https://content.cld.iop.org/journals/1367-2630/21/1/013038/revision2/njpaafeebieqn151.gif) note that a non-projective measurement may have more than d outcomes. One thus has the joint distribution
note that a non-projective measurement may have more than d outcomes. One thus has the joint distribution ![$p(a,m)=p(a)p(m| a)=\tfrac{1}{d}\mathrm{Tr}[{M}_{m}| a\rangle \langle a| ]$](https://content.cld.iop.org/journals/1367-2630/21/1/013038/revision2/njpaafeebieqn152.gif) specifying the probability of preparing
specifying the probability of preparing  and obtaining outcome m. It will be convenient to denote the random variables corresponding to a and m by
and obtaining outcome m. It will be convenient to denote the random variables corresponding to a and m by  and
and  , respectively, where we use the double-struck letters to differentiate the classical random variable
, respectively, where we use the double-struck letters to differentiate the classical random variable  from the quantum observable A.
from the quantum observable A.

Figure A1. A schematic of the operational scenario defining the noise  of a measurement
of a measurement  with respect to the target observable A [36]. The eigenstates
with respect to the target observable A [36]. The eigenstates  of A are prepared uniformly at random before being measured by
of A are prepared uniformly at random before being measured by  , which produces an outcome m.
, which produces an outcome m.
Download figure:
Standard image High-resolution imageGiven a particular measurement outcome m one may ask what state  was prepared. If the measurement is noiseless, one should be able to determine this with certainty; conversely, the uncertainty in which eigenstate of A was prepared, given m, is used to quantify the noise of
was prepared. If the measurement is noiseless, one should be able to determine this with certainty; conversely, the uncertainty in which eigenstate of A was prepared, given m, is used to quantify the noise of  with respect to A. More precisely, this is quantified via the conditional Shannon entropy as [36]
with respect to A. More precisely, this is quantified via the conditional Shannon entropy as [36]

where

A large conditional Shannon entropy  means there is a lot of uncertainty in the value of a (i.e. the eigenstate prepared) given an observation m, so this definition indeed quantifies the intuitive notion of noise discussed above.
means there is a lot of uncertainty in the value of a (i.e. the eigenstate prepared) given an observation m, so this definition indeed quantifies the intuitive notion of noise discussed above.
The noise  can thus be easily measured by preparing randomly the eigenstates
can thus be easily measured by preparing randomly the eigenstates  of A before measuring them and estimating the joint distribution p(a, m) from the observed incident counts. To probe the noise–noise tradeoff,
of A before measuring them and estimating the joint distribution p(a, m) from the observed incident counts. To probe the noise–noise tradeoff,  and
and  must both be calculated, which requires performing two such experiments (preparing randomly the states
must both be calculated, which requires performing two such experiments (preparing randomly the states  in the second). In practice, both experiments can be performed simultaneously by preparing the eigenstates
in the second). In practice, both experiments can be performed simultaneously by preparing the eigenstates  at random with probability
at random with probability  and separating out the statistics p(a, m) and p(b, m); this is precisely what we do in the experiment described in the main text.
and separating out the statistics p(a, m) and p(b, m); this is precisely what we do in the experiment described in the main text.
A.2.
 and its connection with entropic preparation uncertainty
and its connection with entropic preparation uncertainty

The set  of obtainable noise values completely characterizes the noise–noise tradeoff relation. Characterizing R(A, B) is, in general, difficult due to the nonlinearity of A.1 and the need to consider the noise obtainable by arbitrary POVMs (which themselves are not easily characterized beyond the simplest systems) [30, 36]. To do so for qubit measurements, we exploit a relation to entropic preparation uncertainty relations. Let
of obtainable noise values completely characterizes the noise–noise tradeoff relation. Characterizing R(A, B) is, in general, difficult due to the nonlinearity of A.1 and the need to consider the noise obtainable by arbitrary POVMs (which themselves are not easily characterized beyond the simplest systems) [30, 36]. To do so for qubit measurements, we exploit a relation to entropic preparation uncertainty relations. Let  be the measurement entropy of A for a state ρ, defined as
be the measurement entropy of A for a state ρ, defined as

The entropic preparation region

characterizes how well-defined the values of A and B can be for any quantum state ρ, and is a key object in the study of entropic preparation uncertainty relations [37].
In [36] it was shown that  , where
, where  denotes the convex hull. Moreover, the authors showed that one has equality for qubit systems, and for such systems E(A, B) is well-understood. Indeed, it has been shown that for Pauli observables
denotes the convex hull. Moreover, the authors showed that one has equality for qubit systems, and for such systems E(A, B) is well-understood. Indeed, it has been shown that for Pauli observables  and
and  [37]
[37]

from which one obtains equation (4) of the main text (after which g is defined). By exploiting the fact that E(A, B) is convex when  , for which one thus has R(A, B) = E(A, B), one can, for such observables, write the explicit tight noise–noise uncertainty relation
, for which one thus has R(A, B) = E(A, B), one can, for such observables, write the explicit tight noise–noise uncertainty relation

When  it is not possible to have an explicit inequality in this way. Nonetheless, the boundary E(A, B) can be found and expressed in a piecewise form. Indeed, note that only the 'lower boundary' of E(A, B) (i.e. the points (s,t) on the boundary of E(A, B) for which there are no points (u,v) in E(A, B) with u < s or v < t) is non-convex for
it is not possible to have an explicit inequality in this way. Nonetheless, the boundary E(A, B) can be found and expressed in a piecewise form. Indeed, note that only the 'lower boundary' of E(A, B) (i.e. the points (s,t) on the boundary of E(A, B) for which there are no points (u,v) in E(A, B) with u < s or v < t) is non-convex for  (see figure 2 of the main text). The convex hull of E(A, B) can be readily computed numerically and one thus obtains a linear boundary between two points
(see figure 2 of the main text). The convex hull of E(A, B) can be readily computed numerically and one thus obtains a linear boundary between two points  and
and  (corresponding to the two points obtained by the projective measurements that must be mixed to saturate the lower boundary of R(A, B)) and the curve given by the points saturating equation (A.6) elsewhere.
(corresponding to the two points obtained by the projective measurements that must be mixed to saturate the lower boundary of R(A, B)) and the curve given by the points saturating equation (A.6) elsewhere.
For orthogonal Pauli measurements  , it is worth noting that one has simply the tight inequality
, it is worth noting that one has simply the tight inequality

which takes precisely the same form as the Maassen and Uffink inequality (see equation (2) in the main text). In contrast, projective measurements (which can only give points in E(A, B)) satisfy the relation

which can therefore be violated by POVMs.
Experimentally, we are interested in saturating the noise–noise tradeoff relation, achievable by performing measurements for which  is on the boundary of R(A, B). Of particular interest is the 'lower boundary' of R(A, B); measurements obtaining points on this are optimal with respect to the noise–noise tradeoff. In order to obtain such points when E(A, B) is non-convex, one must consider non-projective measurements. In particular, to this end we implement four-outcome POVMs which correspond to probabilistic mixtures of projective measurements (and recording which projective measurement was performed). Projective measurements suffice to obtain all points in E(A, B) (and thus in R(A, B) with E(A, B) is already convex).
is on the boundary of R(A, B). Of particular interest is the 'lower boundary' of R(A, B); measurements obtaining points on this are optimal with respect to the noise–noise tradeoff. In order to obtain such points when E(A, B) is non-convex, one must consider non-projective measurements. In particular, to this end we implement four-outcome POVMs which correspond to probabilistic mixtures of projective measurements (and recording which projective measurement was performed). Projective measurements suffice to obtain all points in E(A, B) (and thus in R(A, B) with E(A, B) is already convex).
Appendix B.: Experimental techniques
The experimental approach we use to probe uncertainty relations with neutron spins is similar to that used in [22], and further details on the general approach can be found therein. The primary additional challenge in the present experiment is to implement the four-outcome POVMs needed to probe the tight entropic uncertainty relation.
The initially polarized neutrons encounter two supermirror analyzers as shown in figure 1(c), which separate the neutrons stochastically according to their up and down spins by reflection on a magnetic multilayer structure, with the transmitted beams continuing to the next stage of the experiment. The polarizer functions as a Stern–Gerlach magnet with a similar working principle. Each supermirror has a probability of transmitting the neutrons depending on the relative angle between the incident spin and the analyzer orientation. The orientations of the analyzers are kept static along the positive z direction (aligned with  ) while the incoming neutron spin state is changed dynamically by the first and third DC-coils.
) while the incoming neutron spin state is changed dynamically by the first and third DC-coils.
The three DC-coils in the setup all work identically. Static magnetic fields are generated by direct currents fed into wires arranged as solenoids. One wire spirals helically along the vertical axis and another wire winds around the x-axis perpendicular to the neutron's y-direction of propagation. The large dimensions of the coils guarantee that the magnetic field inside the solenoids can be regarded as homogeneous for the neutrons. The purpose of the vertical magnetic field is to compensate for the exterior guide field and Earth's magnetic field, which are effectively nullified in the solenoids.
The purpose of the lateral coil is to induce a unitary Larmor precession of the initial spin. Classically, the field in the solenoid exerts a torque on the polarization vector, which quantum-mechanically is described by the unitary operator

where the rotation angle α = γ Bx t is defined by the magnitude of the magnetic field Bx in x-direction, γ being the neutron gyromagnetic factor γ =  , and the time of flight through the solenoid
, and the time of flight through the solenoid  . The rotation angle α is controlled by the current that generates the magnetic field.
. The rotation angle α is controlled by the current that generates the magnetic field.
Let  be the state prior to Analyzer 1 and
be the state prior to Analyzer 1 and  be the orthogonal spin state. The ideal approach to implementing the four-outcome POVM in equation (6) would be to perform the projective measurement
be the orthogonal spin state. The ideal approach to implementing the four-outcome POVM in equation (6) would be to perform the projective measurement  on the sub-ensemble of neutrons transmitted (with probability q =
on the sub-ensemble of neutrons transmitted (with probability q =  ) by Analyzer 1 and the projective measurement
) by Analyzer 1 and the projective measurement  on the reflected sub-ensemble(i.e. with probability
on the reflected sub-ensemble(i.e. with probability  =
=  ). In practice, instead of implementing four separate beams and detectors, at each analyzer the reflected parts are discarded and the four operators are measured sequentially by applying the appropriate rotations at DC-Coils 1 and 3. These four configurations, corresponding to the four POVM elements, along with the randomly chosen state to prepare (
). In practice, instead of implementing four separate beams and detectors, at each analyzer the reflected parts are discarded and the four operators are measured sequentially by applying the appropriate rotations at DC-Coils 1 and 3. These four configurations, corresponding to the four POVM elements, along with the randomly chosen state to prepare ( or
or  ) are thus cycled in 60 s slots while keeping the total beam intensity de facto constant. The counts Ia,m and Ib,m for each combination of state preparation (±a or ±b) and outcome m are thereby obtained and recorded.
) are thus cycled in 60 s slots while keeping the total beam intensity de facto constant. The counts Ia,m and Ib,m for each combination of state preparation (±a or ±b) and outcome m are thereby obtained and recorded.
Experimentally, this means that in order to measure the POVM elements  is chosen so that
is chosen so that  and DC-Coil 3 plus Analyzer 2 are conditioned to measure
and DC-Coil 3 plus Analyzer 2 are conditioned to measure  , where
, where  and
and  (since DC-Coil 3 controls the angle of the neutrons before Analyzer 2, and thus both the direction of the projection and which outcome ± is measured). To measure
(since DC-Coil 3 controls the angle of the neutrons before Analyzer 2, and thus both the direction of the projection and which outcome ± is measured). To measure  is changed to α + π so that
is changed to α + π so that  and DC-Coil 3 plus Analyzer 2 measure instead
and DC-Coil 3 plus Analyzer 2 measure instead  (with
(with  and
and  ). The preparation of the desired state is effectuated by a rotation induced by DC-Coil 2, which is randomly chosen based on the signal from a uniform random number generator. As described in the main text,
). The preparation of the desired state is effectuated by a rotation induced by DC-Coil 2, which is randomly chosen based on the signal from a uniform random number generator. As described in the main text,  correspond to directions
correspond to directions  , while
, while  are chosen in the yz-plane.
are chosen in the yz-plane.
After monochromatization and polarization the neutron count rate at the tangential beam port is roughly  . The count rate at the last detector, which is ≈3 m from the polarizer, is approximately 40 neutrons per second at maximum, which is affected by the beam divergence of approximately 1◦, the transmission efficiency of the supermirrors (40%) and the scattering and absorption of neutrons in the copper wires of the coils. The detection efficiency for thermal neutrons is almost 1, owing to the high absorption cross section of
. The count rate at the last detector, which is ≈3 m from the polarizer, is approximately 40 neutrons per second at maximum, which is affected by the beam divergence of approximately 1◦, the transmission efficiency of the supermirrors (40%) and the scattering and absorption of neutrons in the copper wires of the coils. The detection efficiency for thermal neutrons is almost 1, owing to the high absorption cross section of  enriched BF3 gas detector (cylindrical counter tube with 6 cm opening diameter and 40 cm length). The discrete counts at fixed rates in time are described by a Poisson distribution, which implies that one standard deviation of statistical error is given by the square root of the mean value. Depolarization through ambient magnetic fields is suppressed by a 13 Gauss magnetic guide field. A small imperfect spin separation in the supermirror leads to a slight mixture of spin states and therefore to a loss of contrast from 100% to roughly 98%. To cope with this systematic imperfection, the intensity modulation of the polarization is fitted with
enriched BF3 gas detector (cylindrical counter tube with 6 cm opening diameter and 40 cm length). The discrete counts at fixed rates in time are described by a Poisson distribution, which implies that one standard deviation of statistical error is given by the square root of the mean value. Depolarization through ambient magnetic fields is suppressed by a 13 Gauss magnetic guide field. A small imperfect spin separation in the supermirror leads to a slight mixture of spin states and therefore to a loss of contrast from 100% to roughly 98%. To cope with this systematic imperfection, the intensity modulation of the polarization is fitted with  which, in the ideal case would simply be
which, in the ideal case would simply be  . In order to take the efficiency of the detector into account, not the absolute, but the relative values of the fit parameters c, d are used.
. In order to take the efficiency of the detector into account, not the absolute, but the relative values of the fit parameters c, d are used.
Appendix C.: Additional details on the data evaluation
For each pair of measurements A and B for which the uncertainty relation was to be probed, a range of different measurements  were implemented using the experimental methods described in the previous section (each giving one point on figures 2 or 3 of the main text). For each such measurement (and choice of observables) the counts Ia,m and Ib,m are obtained, where m = 1, 2, 3, 4 (corresponding to the outcomes of
were implemented using the experimental methods described in the previous section (each giving one point on figures 2 or 3 of the main text). For each such measurement (and choice of observables) the counts Ia,m and Ib,m are obtained, where m = 1, 2, 3, 4 (corresponding to the outcomes of  ), giving a total of 16 counts.
), giving a total of 16 counts.
In order to calculate the noises  and
and  from these counts, the joint probability distributions p(a, m) and p(b, m) are first estimated as
from these counts, the joint probability distributions p(a, m) and p(b, m) are first estimated as

From equation (A.2) one can calculate that the conditional probabilities  and
and  are thus given by
are thus given by

from which the noise can be be calculated directly from equation (A.1).
In order to saturate the noise–noise uncertainty relation with POVMs, we are particularly interested in families of POVMs

with different values of q but  and
and  fixed. While the target value of q is chosen, as described earlier, by controlling the current in DC-Coil 1, in practice the effective value of q might vary slightly from the desired one. This is a consequence of the application of high currents in the wires which cause slight variations of resistance, leading to fluctuations of the magnetic field, over time. More precise estimates of the effective values of q implemented can be calculated from the counts
fixed. While the target value of q is chosen, as described earlier, by controlling the current in DC-Coil 1, in practice the effective value of q might vary slightly from the desired one. This is a consequence of the application of high currents in the wires which cause slight variations of resistance, leading to fluctuations of the magnetic field, over time. More precise estimates of the effective values of q implemented can be calculated from the counts  and Ib,m. To this end, note that p(m = 1) + p(m = 2) = q; in practice, one may arrive at slightly different values by calculating this from p(a, m) or p(b, m) due to statistical fluctuations, so we estimate q as the average obtained from both these distributions. We thus have
and Ib,m. To this end, note that p(m = 1) + p(m = 2) = q; in practice, one may arrive at slightly different values by calculating this from p(a, m) or p(b, m) due to statistical fluctuations, so we estimate q as the average obtained from both these distributions. We thus have

Note that this value of q is only used to help present and understand our results for families of measurements with varying values of q, but is not needed to calculate the noises which are computed directly from the counts Ia,m and Ib,m.
Typical examples of the counts  and Ib,m required to determine the entropic noises
and Ib,m required to determine the entropic noises  and
and  are plotted in figures C1 and C2. The counts shown in figures C1(a) and C2(a) are proportional to the joint probabilities p(a, m) as well as the conditional probabilities
are plotted in figures C1 and C2. The counts shown in figures C1(a) and C2(a) are proportional to the joint probabilities p(a, m) as well as the conditional probabilities  (see equation (C.1)). As a result, when the measurement corresponds to a projective measurement in direction
(see equation (C.1)). As a result, when the measurement corresponds to a projective measurement in direction  (ϑ1 = 0 in figure C1(a)), outcome m = 1 occurs with probability almost 1 (equal in the ideal case). In figure C1(a), as ϑ1 is increased, the measurement becomes noisy and outcome m = 2 becomes more probable. In figure C2(a) when q ≃ 1 the measurement is projective along a direction
(ϑ1 = 0 in figure C1(a)), outcome m = 1 occurs with probability almost 1 (equal in the ideal case). In figure C1(a), as ϑ1 is increased, the measurement becomes noisy and outcome m = 2 becomes more probable. In figure C2(a) when q ≃ 1 the measurement is projective along a direction  very close to
very close to  , while as q is decreased towards 0,
, while as q is decreased towards 0,  is mixed with
is mixed with  and outcomes 3 and 4 become more probable as the noisy measurement in direction
and outcomes 3 and 4 become more probable as the noisy measurement in direction  (close to
(close to  ) is performed more often by the POVM. The counts Ib,m are interpreted similarly, except that, since the eigenstates of A and B are not aligned, the corresponding distributions are never simultaneously peaked with respect to both observables.
) is performed more often by the POVM. The counts Ib,m are interpreted similarly, except that, since the eigenstates of A and B are not aligned, the corresponding distributions are never simultaneously peaked with respect to both observables.

Figure C1. Neutron counts (a) Ia,m and (b) Ib,m for Pauli observables  and
and  where
where  , and measurements
, and measurements  with
with  , and
, and  . This scenario corresponds to that shown in figure 3(b) of the main text. The counts for outcomes m = 3, 4, which ideally should not occur, are due to the fact that the effective value of q is not exactly 1, due primarily to the imperfect purity of the neutron spin states. For both (a) and (b), the counts shown are for the positive eigenstate being prepared (i.e.
. This scenario corresponds to that shown in figure 3(b) of the main text. The counts for outcomes m = 3, 4, which ideally should not occur, are due to the fact that the effective value of q is not exactly 1, due primarily to the imperfect purity of the neutron spin states. For both (a) and (b), the counts shown are for the positive eigenstate being prepared (i.e.  and
and  , respectively), and the counts are proportional to the joint probabilities p(a, m) and p(b, m). Counts are shown for six different measurements, each with q ≃ 1 and starting with polar angle ϑ1 = 0 and increasing in increments of
, respectively), and the counts are proportional to the joint probabilities p(a, m) and p(b, m). Counts are shown for six different measurements, each with q ≃ 1 and starting with polar angle ϑ1 = 0 and increasing in increments of  . In (a), almost all counts are initially for the m = 1 outcome, since ϑ1 = 0 corresponds to a projective measurement
. In (a), almost all counts are initially for the m = 1 outcome, since ϑ1 = 0 corresponds to a projective measurement  , which ideally would yield this outcome deterministically. As ϑ1 is increased the direction of projection no longer aligns with
, which ideally would yield this outcome deterministically. As ϑ1 is increased the direction of projection no longer aligns with  and outcome m = 2 becomes more likely. At
and outcome m = 2 becomes more likely. At  the first two outcomes are equiprobable, while for larger ϑ1 outcome m = 2 begins to dominate. In (b), the measurement is (ideally) deterministic when
the first two outcomes are equiprobable, while for larger ϑ1 outcome m = 2 begins to dominate. In (b), the measurement is (ideally) deterministic when  since, for this angle
since, for this angle  . The distribution changes symmetrically around the
. The distribution changes symmetrically around the  case, with outcomes m = 1 and m = 2 equiprobable when
case, with outcomes m = 1 and m = 2 equiprobable when  .
.
Download figure:
Standard image High-resolution image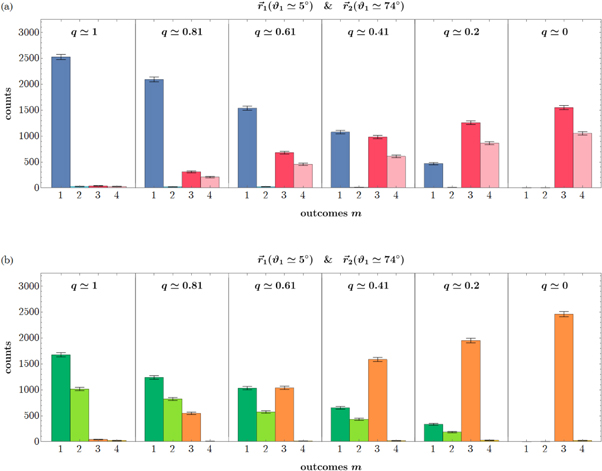
Figure C2. Neutron counts (a) Ia,m and (b) Ib,m for Pauli observables  and
and  where
where  , and measurements
, and measurements  with
with  and a range of values of q from q ≃ 1 (leftmost box) to q ≃ 0 (rightmost box) in decrements of Δq ≃ −0.2. This scenario corresponds to that shown in figure 2(c) of the main text. For both (a) and (b), the counts shown are for the positive eigenstate being prepared (i.e.
and a range of values of q from q ≃ 1 (leftmost box) to q ≃ 0 (rightmost box) in decrements of Δq ≃ −0.2. This scenario corresponds to that shown in figure 2(c) of the main text. For both (a) and (b), the counts shown are for the positive eigenstate being prepared (i.e.  and
and  , respectively), and the counts are proportional to the joint probabilities p(a, m) and p(b, m). In (a), when q ≃ 1 and q ≃ 0, the measurements are projective in directions
, respectively), and the counts are proportional to the joint probabilities p(a, m) and p(b, m). In (a), when q ≃ 1 and q ≃ 0, the measurements are projective in directions  and
and  , respectively. In between the distributions are a convex mixture of these two cases, and thus more than 2 measurement outcomes occur. As q is decreased, the measurement transitions from a projective measurement in direction
, respectively. In between the distributions are a convex mixture of these two cases, and thus more than 2 measurement outcomes occur. As q is decreased, the measurement transitions from a projective measurement in direction  —which is only 5° from
—which is only 5° from  giving (in theory) a 99.8% probability of obtaining outcome m = 1—to a projective measurement in direction
giving (in theory) a 99.8% probability of obtaining outcome m = 1—to a projective measurement in direction  , for which both outcomes m = 3 and m = 4 occur. In between, these measurements are mixed and the histogram shows that the joint distribution is a convex mixture of the two extreme cases q ≃ 1 and q ≃ 0. In (b), the measurement is very close to being deterministic when q ≃ 0 since
, for which both outcomes m = 3 and m = 4 occur. In between, these measurements are mixed and the histogram shows that the joint distribution is a convex mixture of the two extreme cases q ≃ 1 and q ≃ 0. In (b), the measurement is very close to being deterministic when q ≃ 0 since  is only 5° from
is only 5° from  , while for q ≃ 1 both outcomes m = 1 and m = 2 can occur. As q is varied between these cases, the distribution is again a convex mixture of the two extreme cases, so 3 of the 4 outcomes can occur with non-negligible probability.
, while for q ≃ 1 both outcomes m = 1 and m = 2 can occur. As q is varied between these cases, the distribution is again a convex mixture of the two extreme cases, so 3 of the 4 outcomes can occur with non-negligible probability.
Download figure:
Standard image High-resolution imageFootnotes
- 4
Note that as we use an entropic definition for the noise,
does not depend on the actual values a, m taken by and , but only on their distribution.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}