
Abstract
Self-propelled particles are one prototype of synthetic active matter used to understand complex biological processes, such as the coordination of movement in bacterial colonies or schools of fishes. Collective patterns such as clusters were observed for such systems, reproducing features of biological organization. However, one limitation of this model is that the synthetic assemblies are made of identical individuals. Here we introduce an active system based on magnetic particles at colloidal scales. We use identical but also randomly-shaped magnetic micropropellers and show that they exhibit dynamic and reversible pattern formation.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 3.0 licence. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
Invited by Editorial Board Member Rumiana Dimova
Coordinated movement is a widespread phenomenon [1] observed, for example, in colonies of bacteria [2, 3], flocks of birds [4], or human crowds [5]. Controlled experimental studies of such phenomena have been particularly fruitful at the microscale, for example, using biological molecular motors and filaments, or colloidal particles can be produced in very large numbers with relative ease and can be observed in controlled environments. While investigations of the interplay between biological molecular motors and filaments have led to various discoveries, and continue to be an important area of research [6–9], the main drawbacks of these biological systems include the difficulty and cost of purifying filaments and molecular motors and their limited long term stability. In addition, in such cases, the motor trajectory is predetermined by the filament track. Developing a synthetic equivalent at small length-scale will be of potential interest for reaching effective doses in drug delivery [10] or for environmental applications [11]. Therefore, the coordinated movement of synthetic systems has started to be investigated as well. These include photoactivated colloidal particles [12], self-propelled colloids [13] and colloidal rollers driven by Quincke rotation [14]. However, in these cases, the population is composed of identical particles, so developing an alternative system would constitute a step forward in reflecting the natural variability observed for bacteria or birds.
Magnetic fields can be used to control the assembly and function of synthetic structures [15–18]. Using magnetic fields, dynamic self-assembly experiments with colloidal particles have been performed [19, 20]. At the same time, the rotation of individual complex-shaped structures in water has recently been studied in the field of magnetic micro- and nanopropellers [21–27]. Here we show that such differing propellers, when actuated by rotating magnetic fields, form field-dependent patterns.
We used identically shaped helical micropropellers made by glancing angle deposition (GLAD) [22], and also performed experiments with randomly shaped propellers [28]. The latter are based on magnetite nanoparticles glued together by hydrothermal carbonization (see the supplementary material 'materials and methods' (stacks.iop.org/JPhysD/50/11LT03/mmedia)). Electron microscopy images of the two propeller types are presented in figures 1(a) and (b). In a typical experiment, a highly concentrated suspension of propellers is inserted in a capillary and imaged in a custom-designed microscope equipped with three orthogonal Helmholtz-coil pairs [28]. The propellers are then subjected to a rotating magnetic field, which in turn leads to rotation and thus translatory movement of the propellers (schemes in figures 1(c) and (d)). When fields of suitable field strength and frequency are applied (2 mT and 30 Hz in figure 1(f)), the propellers will eventually reach the top capillary surface and form clusters at the water–glass interface. The propellers have no directed motion in this configuration but keep rotating individually with the field frequency around their individual axes of rotation when assembled into a cluster (see video 'cluster example 1'). When the external magnetic field is switched off, the propeller rotation stops, the propellers sink due to gravity and eventually aggregate due to magnetic interactions. Switching the external magnetic field back on reverses the phenomenon and cluster formation starts anew (see video 'on_off').
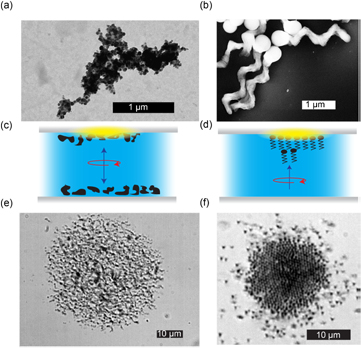
Figure 1. Clusters formed by magnetic micropropellers. (a) A TEM image of an exemplary randomly shaped micropropeller from solution synthesis. These propellers have varying shapes, as demonstrated earlier [23, 28]. (b) An SEM image of helical micropropellers fabricated using the GLAD technique [22]. All propellers fabricated by this technique have approximately identical shapes and are magnetized in a direction approximately orthogonal to their long axis. (c) and (d) Schematic of the experimental setup. Propellers are dispersed in water in a glass capillary (2 × 0.2 × 50 mm). A rotating magnetic field is applied (red arrows), which makes the propellers rotate around an axis perpendicular to the upper capillary surface. Randomly shaped propellers move to the upper and lower surface in approximately equal fractions (dark blue arrows) (c), whereas all nanofabricated propellers move to the upper capillary surface for a particular sense of rotation (d). Videos and images were taken at the upper capillary surface (region highlighted in yellow). At the upper capillary surface, clusters formed in the case of randomly shaped propellers (e), as well as in the case of identical nanofabricated propellers (f). In the experiment depicted in (e) and (f), the field frequency was 50 and 30 Hz respectively, and the field strength was 1 and 2 mT respectively. In both cases the clusters were round in dynamic equilibrium, rotated slowly in the direction of the individual propeller rotation and displayed a boundary region at the cluster edge where the angular velocity of the propellers was higher.
Download figure:
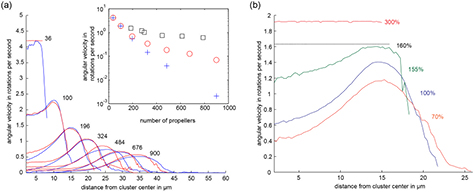
Standard image High-resolution imageHowever, the observed patterns are by far richer than this simple clustering. We indeed obtained long chains forming at low frequencies, clusters at intermediate frequencies and small aggregates at high frequencies (figures S1(d)–(f)). As such, our results show that cluster formation is a generic phenomenon observed in synthetic active matter not affected by the morphological differences of the individual propellers. Looking more specifically, we observed a 'core-layer' structure: the clusters have a pronounced boundary region (see video 'cluster example 2'), in which, as mentioned above, no directed motion is observed at the center but where the angular velocity of the propellers is greatly increased towards the edge of the clusters (figure 2(a)). These observations match those made on magnetic Janus colloids [29]. We performed simulations in order to better understand the dynamic self-assembly of the magnetic micropropellers. In these simulations, we considered the magnetic propellers as spheres with short range repulsion. Hydrodynamic interactions were also included, where only the rotation translation coupling between different propellers was considered (see the supplementary material for details). This simplification of the hydrodynamic interactions was chosen in consideration of earlier work by Jäger et al, which reported similar cluster formation based on a far-field approximation of the Rotne–Prager tensor [30]. The distance between two propellers in our experimental system is typically smaller than the propeller size, and the hydrodynamic interaction is essentially the rotation–translation coupling of Jäger et al [30]. We performed simulations for groups of propellers with identical properties, as well as groups of propellers with different sizes and volume magnetization (simulation part in the supplementary material and videos '100 random prop' and '155 percent'). Figure 2 visualizes the cluster dynamics by plotting the angular velocity of the propellers against their distance from the cluster center, for various cluster sizes (propeller numbers in a cluster) (figure 3(a)) and volume magnetizations (figure 2(b)). Our analysis reveals that the formation of a boundary layer with increased angular velocity depends on the choice of volume magnetization and propeller number. This explains the discrepancy between the experimental results [29] that showed the formation of a boundary layer and earlier theoretical predictions [30] that predicted only a slight increase of angular velocity at the cluster edge. The fact that the results of our simplified hydrodynamic simulations are otherwise very similar to those by Jäger et al [30] suggests that the rotation–translation coupling is the dominant hydrodynamic effect. In our simulations, a boundary region with increased angular propeller velocity is observed for sufficiently weak volume magnetization, or a sufficiently large number of propellers. Similarly, we observed in our experiments that this boundary region is more pronounced for larger clusters.
{kind=link}
Figure 2. Analysis of the boundary region. (a) The average angular velocity of the propellers, as measured with respect to the center of the cluster, is plotted against the distance from the cluster center. Red curves are simulations with identical propellers, whereas blue curves are simulations using randomly sampled propeller properties. We show the effect of cluster size on the formation of the boundary region. Results are plotted for 36, 100, 196, 324, 484, 676, and 900 propellers in a cluster. Clusters larger than 36 propellers show a boundary region in which the angular velocity of the propellers is increased. With growing cluster size, the rotation frequency of the cluster drops. While the angular velocity in the boundary region does not depend strongly on the propeller properties, the angular velocity of the propellers near the cluster center drops less quickly for clusters consisting of identical propellers. The inset highlights this difference: the angular velocity at a distance of 5 µm from the cluster center is plotted against the number of propellers in the cluster. The blue crosses are simulations with different propeller properties, the red circles correspond to simulations with identical propellers and the black squares are experimental data for identical propellers. For the experimental data, the number of propellers was estimated based on the cluster size, and the angular frequency was measured via a Fourier transform of the central region at different time points. The angular velocity of the randomly shaped micropropellers is not depicted as it cannot be determined experimentally by this technique. The relatively large discrepancy between the simulations and measurements is due to the crude approximation of the propellers as spheres with complex shapes. The general trend and the order of magnitude are nevertheless the same in both simulations and experiments. (b) The average angular velocity is plotted against the distance from the cluster center as above, now focusing on simulations using 196 identical propellers. We indeed report on the effect of magnetization on the formation of the boundary region. The percentage values indicate the magnitude of the magnetic moment of the propellers with respect to the standard value of maghemite (100% corresponds to  Am2, or 1.5% of the saturation magnetization of maghemite). The transition for forming a boundary layer is quite sharp, lying between 155 and 160%.
Am2, or 1.5% of the saturation magnetization of maghemite). The transition for forming a boundary layer is quite sharp, lying between 155 and 160%.
Download figure:
Standard image High-resolution image{kind=link}
These results show that the propellers lend themselves to dynamic self-assembly processes in a similar fashion to spherical colloidal particles [29, 30]. The similarity between the systems is striking, considering how different the hydrodynamics of the propellers of random shapes moving upwards and towards a glass interface are from the rotating spheres that have sedimented. The use of magnetic micropropellers instead of spheres, however, opens up vast possibilities for more complex actuation patterns, since the magnetic propellers can move through water.
As a summary, the systems based on random-shaped magnetic microswimmers and the associated observed cluster formation may be thought of as a synthetic analog of living systems. Our system indeed goes beyond the typical colloidal active matter as it not only reproduces the variability in the population of biological organisms, but also their capabilities of reversible assembly.
Acknowledgments
We thank S Klumpp and A Godec for discussions. This research was supported by the Max-Planck Society. DF acknowledges financial support from the European Research Council (Starting Grant MB2 N°256915).
Movie 1. Supplementary video file (5060 KB MP4).
Movie 2. Supplementary video file (5087 KB MP4).
Movie 3. Supplementary video file (2846 KB MP4).
Movie 4. Supplementary video file (20271 KB MP4).
Movie 5. Supplementary video file (2981 KB MP4).
Movie 6. Supplementary video file (5988 KB MP4).