

Abstract
Magnetically powered nanomotors have received increasing attention for decades because of their diverse potential applications. Here, we demonstrate a rod-shaped Au–Ni bimetallic nanomotor that can be powered by the gradients of applied magnetic fields. Efficient and steady control of locomotion over the Brownian motion is achieved by modulating the magnetic field and tailoring the length of Ni and Au segments. The nanomotors are ideal for use as a dynamic surface-enhanced Raman scattering (SERS) sensor platform, in that the average enhancement is up to almost one order of magnitude higher than that in a conventional nanostructured Au substrate, thus providing a promising alternative for real-time biochemical sensing.
Export citation and abstract BibTeX RIS
Micro- and nanomotors, a class of minute "engines" that move in fluids, have received increasing attention for decades because of their diverse potential applications, ranging from security monitoring1) to biodiagnosis2) and from directed drug delivery3–5) to lithography.6) Nature has created a myriad of efficient biomotors through millions of years of evolution and uses them in numerous biological processes.7,8) Inspired by natural biomotors, researchers have currently explored and developed a wide variety of synthetic nanomotors. Among the different types of nanomotors, chemically powered nanomotors are of particular interest because of their outstanding self-propulsion performance. For instance, Wang and co-workers have developed catalytic nanomotors3,7,9) that offer great promise for creating self-powered practical nanomachines and provide the building blocks for realizing advanced nanoscale transport. In spite of such tremendous success, the chemically powered nanomotors inevitably require the addition of external peroxide fuel, which commonly leads to incomplete pollutant degradation, greatly hindering their widespread use10) (especially in in vivo applications). In order to address these limitations, a variety of fuel-free nanomotors harnessing different sources of energy,11) including surface tension force,12) electric field,13) photonic14) or acoustic force,15,16) and external magnetic field,17) for their locomotion have been developed.
Magnetically powered nanomotors are attractive candidates for a variety of biomedical applications because they can be manipulated by an externally applied magnetic field regardless of whether there are intervening structures. For magnetic nanomotors, one of the most inspiring challenges is achieving efficient propulsion in the low-Reynolds-number regime, where inertia no longer effectively contributes to motion.11,18) Such propulsion commonly requires breaking the system symmetry by body rotation or structural deformation (e.g., helices,4,19,20) striped rods,21) worm shapes,22) flexible filaments,23) artificial flagella,24) and colloidal doublets25)). The large-scale preparation of such nonbasic-shaped nanomotors is still challenging and involves complex and expensive fabrication techniques, typically including self-scrolling, three-dimensional (3D) direct laser writing, and glancing-angle deposition.8) Therefore, there is an urgent need to explore a more basic, simple, robust, and easily available magnetic nanomotor for diverse biomedical applications.
In this work, we carried out experiments in which magnetic field gradients were applied to propelling bimetallic rod-shaped nanomotors in axial directional motion with controllable speed, as illustrated in Fig. 1(a). For motors at the nanoscale, Brownian motion induced by collisions with water molecules becomes increasingly significant as their size decreases, and greatly interferes with the directionality of motion. In the following sections, we demonstrate that steady motion control over the Brownian motion (e.g., initiating, stopping, steering, and slowing the motion of the nanomotor) is achieved by modulating the magnetic field and tailoring the lengths of Ni and Au segments. Furthermore, we demonstrate a design of a dynamic surface-enhanced Raman scattering (SERS)-based detection platform,26,27) in which a modified porous nanomotor is placed in very close proximity to a nanostructured gold film surface to fabricate some nanoscale gaps. The nanogaps yield a significantly stronger near-field and enable real-time SERS detection.28,29) In the presence of the nanomotor, the SERS intensities of the target molecules was 4–10 times higher than that obtained from a naked nanostructured Au substrate. Such magnetically powered nanomotors obviate the need for using a body rotation mechanism for their motion, and thus eliminate the requirement for geometric complexity. Therefore, they can easily be fabricated without the requirements of high-cost instruments and harsh experimental conditions. Owing to these distinct advantages, the rod-shaped nanomotors can be expected to offer great promise for diverse environmental, biomedical, and sensing applications.

Fig. 1. Rod-shaped Au–Ni bimetallic nanomotor powered by magnetic field gradients. (a) Schematic illustration of magnetically powered rod-shaped nanomotor and its propulsion under magnetic field. (b) TEM image of the nanomotors. (c) Representative TEM image of nanomotor with a length of 1.7 µm. (d) Nanomotor with a length of 1.0 µm, and (e) nanomotor with a length of 0.5 µm. (f) Size distributions of nanomotors used in this experiments. The data were obtained from TEM images.
Download figure:
Standard image High-resolution imageAs illustrated schematically in Fig. 1(a), the rod-shaped nanomotors are constructed from gold and nickel nanorod segments. Such bimetallic nanorods are fabricated by electrodeposition in porous alumina membranes (for synthesis details, see the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia). Transmission electron microscopy (TEM) imaging confirmed the expected morphology [Fig. 1(b)]. As shown, the fabricated bisegment nanorods with an average diameter of 200 nm display a well-defined rod-shaped structure. Here, three batches were selected for further study: nanorods with lengths of 1.7 ± 0.5, 1.0 ± 0.4, and 0.5 ± 0.1 µm [Figs. 1(c)–1(e)]. The uniformity of such nanorods was determined using ImageJ software. At least 300 different nanomotors from multiple TEM fields of view were counted and found to exhibit relatively good uniformity [Fig. 1(f)].
The resulting nanomotors are magnetically powered by a magnetic field gradient. Experiments were conducted using a homemade cylindrical sample cell, as illustrated in Fig. 1(a). The fabricated nanorod with a length of 1.0 µm was first suspended in water. Such a bisegment nanorod can be moved in a controlled manner by modulating the gradient of the applied magnetic field, which changes the magnetic force on the nanomotor. Figures 2(a)–2(c) illustrate such controlled movement of the nanomotor by switching the gradient of the applied magnetic field between 4 and 0 T/m. The tracking trajectories in Figs. 2(a)–2(e) display the motion over 6 s, with an average speed of 7.2 µm/s, which corresponds to a relative speed of nearly seven body lengths/s. The corresponding movie S1 in the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia shows the efficient movement of the nanomotors using different gradients of magnetic field. As expected, the speed increases from 2.5 to 7.2 and 9.5 µm/s upon increasing the applied field gradient from 2 to 4 and 5 T/m, respectively. Moreover, modulating the magnetic field allows precise ON/OFF motion control of the nanomotors. We found that the nanomotor stops its directional motion immediately upon turning the magnetic field OFF. Figures 2(a)–2(e) and the corresponding video S1 in the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia demonstrate a durable ON/OFF/ON cycle. It can be observed that the directional movement of the nanomotor stopped in the absence of magnetic field gradient and renewed upon switching the field gra-dient ON. Such a capability to regulate the speed of the nanomotors is important for practical applications in cargo transport, drug delivery, and biochemical sensing.
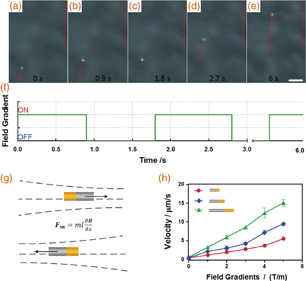
Fig. 2. Propulsion of the Au–Ni bimetallic nanomotor. (a)–(e) Tracking lines (taken from video S1 in the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia) illustrating the typical trajectories traveled by a Au–Ni rod-shaped nanomotor over 6 s. The red lines in the images are the reference lines drawn on the ocular lens. Scale bar: 10 mm. (f) Corresponding changes in the applied field gradients. ON: magnetic field gradient, 4 T/m. OFF: magnetic field gradient, 0 T/m. (g) Illustration of the force experienced by a magnetic nanorod in a nonuniform magnetic field. (h) Dependence of the nanomotor speed on the applied magnetic field gradient. Symbols represent experimental data for different lengths of the nanomotors: red circles, 0.5 ± 0.1 µm; blue diamonds, 1.0 ± 0.4 µm; green triangles, 1.7 ± 0.5 µm. Error bars show standard deviations of the measured speeds (10 samples).
Download figure:
Standard image High-resolution imageIn a low-Reynolds-number regime, nanomotors must expend force continuously in order to continue to move.11) If a magnetic nanorod of length l, which has magnetic poles m (Wb) and −m at its ends, is placed in a uniform magnetic field H, each pole is acted upon by a force as F = mH in opposite directions. Thus, a uniform magnetic field can only exert a torque on a magnetic nanorod, but no translational force. A translational force acts on the magnetic nanorods only if there is a gradient of the field, ∂Hx/∂x. The translational force is given by30)

in the x-direction [Fig. 2(g)], where M = ml is the magnetic moment of the nanorods. The force that propels the nanorods along the axis can be estimated using Eq. (1). Theoretically, ultrasmall Au nanorods have demonstrated ferromagnetism that, at diameters larger than 4 nm, reverts back to that of the bulk state Au, where Au is known to have very slight diamagnetic properties. Nickel is a well-known ferromagnetic material, and the magnetic moment is along the long axis of the nanorod as a result of shape anisotropy. Experimentally, the magnetic moment of the bisegment nanorods is (0–5) × 104 emu/kg and the gradient of the applied field is about 0–5 T/m, which corresponds to a force in the range of 0–25 pN, and are sufficient to move the nanorods.
On the basis of this analysis, the speed of the rod-shaped nanomotors levitated in solution can be readily controlled by changing the gradient of the applied magnetic field. We tested the propulsion performance of the rod-shaped nanomotor (length: 1 µm) under different field gradients [Fig. 2(h)]. The velocities of at least 10 nanomotors were measured over a minimum distance of 30 µm. As expected from Eq. (1), the speed increases from 2.2 ± 0.4 µm/s to 3.0 ± 0.5, 4.4 ± 0.4, 7.2 ± 0.6, and 9.5 ± 0.5 µm/s upon increasing the field gradients from 1 to 2, 3, 4, and 5 T/m, respectively. In addition, as demonstrated in Eq. (1), it is possible to regulate the velocity of the nanomotors by varying the length of the nickel segment. The measured speeds of the nanomotors of different lengths are depicted in Fig. 2(h) as a function of the magnetic field gradient ∂Hx/∂x. For a long nanomotor (length: 1.7 µm), increasingly higher average speeds of 3.3 ± 0.2, 6 ± 0.5, 8.6 ± 0.4, 12.3 ± 1.2, and 15.1 ± 0.9 µm/s are observed upon increasing the field gradients from 1 to 2, 3, 4, and 5 T/m. A short nanomotor (length: 0.5 µm) exhibits a similar dependence on the field gradient, but has lower corresponding speeds of 3.3 ± 0.2, 6 ± 0.5, 8.6 ± 0.4, 12.3 ± 1.2, and 15.1 ± 0.9 µm/s, respectively. Overall, these data indicate that the speed is a function of both the magnetic moment of the nanomotors and the magnetic field gradient.
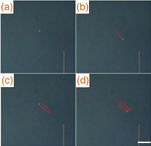
Theoretically, switching the field gradient direction allows the reversal of the motion direction. In order to verify such reversible movement of the nanomotor, an experiment was performed under an opposite magnetic gradient, as illustrated in Fig. 3 and corresponding video S2 in the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia. Figures 3(a)–3(d) show a sequence of pictures of a nanomotor under a manually altered magnetic field. The nanomotor rapidly returns to near its original position upon reapplying the original magnetic field gradient. This process can be repeated until the nanomotor deviates from the field gradient direction owing to Brownian motion, suggesting its capability to repeatedly generate movement in opposite directions. Unfortunately, preliminary experimental results indicated that Brownian motion is still significant and controllability is therefore slightly compromised because of the frequent reversal of the magnetic field gradient, as is shown in video S2 in the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia. Additionally, it is important to note that by increasing the reversal frequency of the field gradients to 10 Hz, a very slight oscillation can be achieved, and the speed of the nanomotor approaches zero, as is illustrated in Fig. 3(e). This phenomenon can be explained as follows: the high frequency used here (∼10 Hz) makes the shift distance of the nanomotor much shorter than the field of view of the microscope, leading to a near complete degradation of the reversal movement behavior. Thus, the precision of the speed control of the motors is expected to be greatly improved by refining the magnetic field control program and the coil circuit.
Download figure:
Standard image High-resolution image
Fig. 3. Reversible movement of the rod-shaped nanomotors. (a)–(d) Tracking lines (corresponding to video S2 in the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia) illustrating the typical reversed trajectories traveled by a Au–Ni rod-shaped nanomotor. Scale bar: 10 mm. (e) Velocity changes of the movement under different field gradients. Error bars show standard deviation of the measured speeds (10 samples).
Download figure:
Standard image High-resolution imageFinally, to expand the practical utility of the nanomotor, we demonstrate a dynamic SERS-based detection platform. SERS is a form of vibrational spectroscopy that relies on inelastic light scattering by molecules and provides a unique spectroscopic signature that can potentially be used to identify the species. As is well known, nanogaps between two adjacent noble metallic surfaces contribute to enhancing the electromagnetic field in the interstices, leading to greater Raman signal enhancement for analytes located therein. In our design, a nanomotor is placed in very close proximity to a nanostructured Au film to form the so-called SERS.
The "hot spot", as illustrated in Fig. 4(a). To achieve this, a 2-µm-thick layer of gold (50 × 50 µm2) was first evaporated on the bottom of the cylindrical sample cell to serve as the SERS substrate. 5,5'-Dithiobis(2-nitrobenzoic acid)26) (DTNB) molecules, as Raman reporters, were then anchored onto the Au film surface via the Au-S bonds. The remaining area of the cell was covered with a 2-µm-thick-layer of glass glue sealant. The Au film surface morphology was imaged by atomic force microscopy (AFM). As shown in Fig. 4(b), the Au film substrate provides a large number of quasi-periodically spheroidal nanoprotrusions, which allows for the potential to form SERS hot spots. Here, the uniformity of Raman signals was first evaluated by considering the Raman intensities at different sites on the Au substrate (Fig. S1 in the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia). As shown, in a series of Raman spectra taken from nine different sites, the observed changes in intensities at 1333 cm−1 are as small as 150 with a relative standard deviation lower than 10%, confirming the high uniformity of the Raman intensity over the Au substrate. Subsequently, we employed a modified porous Au–Ni nanomotor for the fabrication of the SERS-based detection platform. As illustrated in the TEM images presented in Figs. 4(d) and 4(e), such a nanomotor contains three segments: a solid Ni section, a solid Au segment, and a porous Au tail with lengths of ∼0.5, 0.5, and 2 µm, respectively. Incorporating a porous gold segment into the nanomotor body increases the surface roughness, which will serve to enhance the Raman excitation of the reporter molecules.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Fig. 4. Methodologies for SERS-detection platform fabricated with a porous Au–Ni bimetallic nanomotor. (a) Schematic illustration of the dynamic SERS-detection platform. In this design, a modified porous nanomotor is placed in very close proximity to a nanostructured gold film to form SERS "hot spots". (b) AFM image of the nanostructured Au film. Scale bar: 200 nm. (c) Schematic image of the porous Au–Ni bimetallic nanomotor. (d, e) TEM images of the porous nanomotor. (f) SERS spectra of DTNB before and after sinking the porous nanomotor.
Download figure:
Standard image High-resolution image{kind=link}
To perform SERS-based detection, the nanomotor was suspended in water and introduced to the Au film surface. A weak magnetic field (on the order of 30 mT) was applied at the bottom of the sample cell once the nanomotor was in place, and caused the levitated nanomotor to sink (video S3 in the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia). Presented in Fig. 4(f) are Raman spectra collected from the SERS platform before and after the sinking of the nanomotor. Apparently, no obvious SERS peak is observed, aside from a very weak one at 1333 cm−1 (∼300 cps) when the nanomotor is levitated in the water. After the nanomotor sinks, the most pronounced SERS bands of DTNB at 867, 1333, 1067, 1152, and 1558 cm−1 are unambiguously observed, indicating the formation of nanogaps between the nanomotor and the Au film. The results of exhaustive measurements demonstrate that, in the presence of the nanomotor, the SERS intensities at 1333 cm−1 were 4–10 times higher than that obtained from the naked nanostructured Au substrate, and over 103 times higher than that from free DTNB molecules dispersed in aqueous solutions. Uniformity and repeatability statistics are determined from 10 separate batches of 100 samples (Fig. S2 in the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia). As shown, the SERS-based platform exhibits a relatively good uniformity and sample-to-sample reproducibility comparable to those of other reported SERS technology.27) In addition, the dynamic process of the change in SERS intensity is also observed by reducing the integration time of measurements. This dynamic process accompanies the substantial local electric field redistribution in the nanogaps caused by the sinking of the nanomotor, and thus leads to the SERS intensity changes (Fig. S3 in the online supplementary data at http://stacks.iop.org/APEX/10/045202/mmedia). The SERS intensities underwent a significant shift in 0.8–1.5 s while the magnetic field was either ON or OFF in the repetition cycles. These results demonstrate that the major contribution to the SERS signals arises from the nanogap architecture rather than from the roughness of the Au film surface.
In conclusion, we demonstrated a rod-shaped Au–Ni bimetallic nanomotor that could be powered by nonuniform magnetic fields. The field gradients have been used for guiding, initiating, stopping, and slowing the motion of the nanomotors. To expand the practical utility of the nanomotor, we demonstrated a dynamic SERS-based detection platform, in which a modified porous nanomotor was placed in very close proximity to a Au film surface to form SERS hot spots. The Raman molecules (DTNB) benefit from the high local electromagnetic field in these hot spots, because the SERS intensity is enhanced, on average, to almost one order of magnitude higher than that from the conventional nanostructured Au substrate. Such magnetic propulsion of nanomotors obviates the need for using a body rotation mechanism for their motion. Also, the simple design eliminates the requirement for geometric complexity. These rod-shaped magnetically powered nanomotors are thus expected to offer considerable promise for use in a wide range of practical applications ranging from nanoscale transport to nanosurgery and real-time SERS-based sensing.
Acknowledgments
This work was supported by the Natural Science Foundation of China (NSFC) (Nos. 51501102, 11547249, and 11474183) and the Science Foundation for The Excellent Youth Doctors of China Three Gorges University (Nos. KJ2014B077 and KJ2014B076).