



Abstract
Gravitational waves (GWs) provide unobscured insight into the birthplace of neutron stars and black holes in core-collapse supernovae (CCSNe). The nuclear equation of state (EOS) describing these dense environments is yet uncertain, and variations in its prescription affect the proto−neutron star (PNS) and the post-bounce dynamics in CCSN simulations, subsequently impacting the GW emission. We perform axisymmetric simulations of CCSNe with Skyrme-type EOSs to study how the GW signal and PNS convection zone are impacted by two experimentally accessible EOS parameters, (1) the effective mass of nucleons, m⋆, which is crucial in setting the thermal dependence of the EOS, and (2) the isoscalar incompressibility modulus, Ksat. While Ksat shows little impact, the peak frequency of the GWs has a strong effective mass dependence due to faster contraction of the PNS for higher values of m⋆ owing to a decreased thermal pressure. These more compact PNSs also exhibit more neutrino heating, which drives earlier explosions and correlates with the GW amplitude via accretion plumes striking the PNS, exciting the oscillations. We investigate the spatial origin of the GWs and show the agreement between a frequency-radial distribution of the GW emission and a perturbation analysis. We do not rule out overshoot from below via PNS convection as another moderately strong excitation mechanism in our simulations. We also study the combined effect of effective mass and rotation. In all our simulations we find evidence for a power gap near ∼1250 Hz; we investigate its origin and report its EOS dependence.
1. Introduction
Core-collapse supernovae (CCSNe) are the extraordinary birth sites of neutron stars (NSs) and stellar-mass black holes (BHs) and are triggered from the gravitational collapse of a massive star. During a CCSN, a proto-NS (PNS) forms where the iron core of the massive star once was. In a PNS, which subsequently evolves into an NS or a BH, matter exists in a wide range of temperatures, , can be compressed to densities up to and beyond ρ ≃ 1015 g cm−3, and may be proton-rich, y ≃ 0.6, or very neutron-rich, y ≃ 0, where y is the ratio of protons to baryons. As some of these conditions are rarely found elsewhere in the universe, PNSs are unique probes of matter in its most extreme states. However, PNSs are hidden from our direct sight by the outer layers of the massive star. Thus, only neutrinos and gravitational waves (GWs) produced in the aftermath of the core collapse of a massive star can provide unobscured insight into these extreme environments.

As the recent detection of GWs from merging binary systems of BHs (e.g., Abbott et al. 2016) and NSs (Abbott et al. 2017) marks the onset of GW interferometer astronomy, hope arises that the next major breakthrough comes from a multimessenger event of a nearby CCSN (Szczepanczyk et al. 2021). Since the estimated Galactic CCSN rate is per century (Li et al. 2011; Adams et al. 2013), such hope is scientifically justified. The yield of knowledge from such an event is bounded by our understanding of CCSNe and the description of dense nuclear matter. The nuclear equation of state (EOS) is one of the fundamental ingredients for predicting the dynamics of CCSNe. The spectra of neutrinos, the PNS mass, its radius, its cooling rate, and the GW signal are all dependent on the EOS. As details and parameters in the EOS of dense nuclear matter are yet poorly constrained (Oertel et al. 2017), a wide range of EOSs are typically used in CCSN simulations (Hempel et al. 2017). As a result, there are several studies exploring the dependence of the GW emission on the nuclear EOS (Kuroda et al. 2017; Morozova et al. 2018; Pan et al. 2018); however, due to the large nuclear EOS model space available and the diversity of available EOSs in this model space, disentangling the impact of individual EOS parameters on the CCSN dynamics must be done carefully.

Despite differences in microphysics and model construction, some of these EOSs can be characterized in terms of semianalytic, semiexperimental empirical parameters defined via a Taylor expansion about saturation density (Oertel et al. 2017; Margueron et al. 2018). This approach, referred to as meta-modeling, was used by Schneider et al. (2019b) to construct a set of finite-temperature EOSs based on the framework developed by Lattimer et al. (1985), Lattimer & Swesty (1991), and Schneider et al. (2017). These EOSs describe nucleon interactions via a Skyrme force, and the thermal contributions in the homogeneous phases, regions of parameter space where heavy nuclei do not appear, are fully determined by the effective mass of nucleons.
In a comprehensive set of spherically symmetric CCSN simulations (and also limited 3D simulations) of the 20 M⊙ progenitor star of Woosley & Heger (2007), Schneider et al. (2019b) report an effective mass dependence of the post-bounce dynamics. As the effective mass serves as a proxy for the EOS temperature dependence, changing its value affects the thermal pressure throughout the PNS. In fact, increasing the value of the effective mass parameter leads to a decrease in thermal pressure in the core of the PNS. Less thermal support from the core renders the PNS more compact and its outer regions, where the neutrinosphere is located, hotter. A hotter and more compact neutrinosphere emits higher-energy neutrinos with an increased luminosity and neutrino heating, which drives stronger convection and turbulence in the gain region and facilitates successful SN explosions (Schneider et al. 2019b; Yasin et al. 2020). Higher turbulence and convection in the gain region have been suggested to impact PNS oscillations and therefore potentially influence the amplitude of the GWs (Murphy et al. 2009; O'Connor & Couch 2018a). Explosion dynamics aside, the compactness of the PNS is one of the main factors that determines the frequency of the GWs (Müller et al. 2013; Morozova et al. 2018; Pan et al. 2018). Thus, a study of the thermal effects on the GW signal from the core collapse of massive stars is opportune and is carried out here. We find a substantial impact of the effective mass on the peak GW frequency and its evolution through these aforementioned thermal effects.
Recent efforts in understanding the nature of GW emission from CCSNe have also revealed, in some simulations, the presence of a "power gap" in the frequency spectrum of the emitted GW signal. As first noted by Morozova et al. (2018), the power gap is a narrow (Δf ∼ 50 Hz), high-frequency (∼1200 Hz), persistent (hundreds of milliseconds in duration) lack of GW power that is present from the onset of GW emission. Morozova et al. (2018) suggest that this gap has its origins in an interaction between trapped modes in the PNS core and higher-frequency p-modes present in the outer parts of the PNS. As such, it is likely linked to the eventual transition of the dominant GW emission from that of a core g-mode to a higher-frequency mode, either the f-mode (Morozova et al. 2018; Sotani & Takiwaki 2020) or another g-mode (Torres-Forné et al. 2019a). It remains to be seen whether this GW spectral feature is physical in nature, and what, if any, is its EOS dependence. We note, from the public availability of GW signals from CCSNe (with sufficient data to capture signals at ∼1300 Hz), that the presence of this power gap is also seen in the 3D simulations of O'Connor & Couch (2018a) and Radice et al. (2019), but not in the 3D simulation of Mezzacappa et al. (2020). We report on the presence of the power gap in our simulations presented here and explore its nature.
Related to the question of the presence and origin of the GW spectrum power gap is the origin of the GWs themselves. There is tension in the literature regarding the location in PNSs where the GWs are emitted. By decomposing the GW signal into its radial dependence, Mezzacappa et al. (2020) suggest that the bulk of the emission in their 3D simulation arises from inside the PNS convection zone. This is supported to some extent by the work of Andresen et al. (2017), who decompose the signal into the contribution from the PNS convection zone (and its overshoot layer), the convectively stable PNS surface zone, and the gain region. Andresen et al. (2017) find in their 3D models that the emission was predominantly coming from the PNS convection and overshoot layer and little emission was coming from the stable PNS layer itself. However, they note that the majority of the emission comes from the small overshoot region directly at the base of this layer and at the top of PNS convection layer. Similar analysis in Andresen et al. (2017) of axisymmetric (2D) models shows the potential for (perhaps unphysically) large GW emission in the convectively stable PNS layer; however, this is not always present in the 2D simulations they study and may be associated with the presence of a strong standing accretion shock instability (SASI). In this article, we perform an in-depth analysis of the spatial origin of the GW emission. We find evidence for the peak GW emission occurring in the convective overshoot layer at the top of the PNS convection zone, supporting the findings of Andresen et al. (2017). However, we note that the global nature of the GW emission, whose radial profile agrees with the results of a perturbation analysis, suggests that a precise determination of the PNS excitation mechanism via the spatial location of the GW emission alone may not be possible.
In this paper, we perform 2D axisymmetric simulations of CCSNe to investigate the impact of the effective mass and the incompressibility modulus of the EOS on the post-bounce GW signal. We also study the combined effect of rotation and effective mass. With this suite of simulations we also investigate the origin of the power gap and the spatial origin of the GW emission. The paper is organized in the following way. In Section 2 we outline the numerical setup, EOSs used, and how we extract the GW signal from our numerical simulations. In Section 3 we present our results on the dependence of the GW emission on the effective mass (Section 3.1), rotation (Section 3.2), incompressibility (Section 3.3), and spatial origin (Section 3.4), and we present our investigation of the power gap (Section 3.5). We summarize and conclude in Section 4.
2. Methods
2.1. Numerical Setup
Each stellar core-collapse simulation we perform uses a progenitor with a zero-age main-sequence mass of 20 M⊙ from Woosley & Heger (2007) and is started at the onset of collapse in our 2D domain. We utilize the FLASH (v.4) multiscale, multiphysics adaptive mesh refinement framework (Fryxell et al. 2000) modified for core collapse in Couch (2013), Couch & O'Connor (2014), and O'Connor & Couch (2018b). The grid setup is a 2D cylindrical geometry that spans 1 × 109 cm in the radial direction and ±1 × 109 cm along the cylindrical axis. Our maximum block size is 2 × 108 cm, and we allow a total of 10 levels of mesh refinement, giving a minimum block size of ∼3.9 km and minimum grid zone spacing of ∼326 m. Beyond 80 km, we decrease the highest level of refinement attainable by the adaptive mesh refinement routines so as to maintain an angular resolution of at least 0 82 everywhere. This corresponds to a maximum resolution aspect ratio, Δxi
/r, of about 0.014. We use standard Newtonian hydrodynamics and solve gravity by employing a modified general relativistic effective potential (case A) for the monopole contribution (Marek et al. 2006), retaining spherical harmonic orders up to 16. We note that the use of an effective potential leads to, in general, a quantitative overprediction of the GW frequency due to the inconsistency of the underlying Newtonian hydrodynamics (Müller et al. 2013; Zha et al. 2020).
82 everywhere. This corresponds to a maximum resolution aspect ratio, Δxi
/r, of about 0.014. We use standard Newtonian hydrodynamics and solve gravity by employing a modified general relativistic effective potential (case A) for the monopole contribution (Marek et al. 2006), retaining spherical harmonic orders up to 16. We note that the use of an effective potential leads to, in general, a quantitative overprediction of the GW frequency due to the inconsistency of the underlying Newtonian hydrodynamics (Müller et al. 2013; Zha et al. 2020).
We incorporate a multidimensional, multispecies, and energy-dependent neutrino transport following an M1 scheme outlined in O'Connor & Couch (2018b). As such, we distinguish three species of neutrino, i.e., electron neutrinos νe , electron antineutrinos , and the composite group of heavy lepton neutrinos/antineutrinos νx . For each EOS employed, a set of neutrino opacities is generated using the neutrino transport library NuLib (O'Connor 2015). Neutrino opacities are computed for 12 logarithmically spaced energy groups, the first group centered on 1 MeV and the last one centered on ∼315 MeV. For the emission of electron-type neutrinos and antineutrinos, we include electron and positron capture interactions on protons and neutrons, respectively, as well as electron capture on heavy nuclei following Bruenn (1985). For the emission of heavy lepton neutrino pairs we include emission from electron–positron annihilation to pairs following Bruenn (1985) and nucleon–nucleon bremsstrahlung following Burrows et al. (2006) and Hannestad & Raffelt (1998). We include these pair emissions in a parameterized way (Betranhandy & O'Connor 2020). We include isoenergetic scattering of neutrinos of all types on nucleons, nuclei, and alpha particles following Bruenn (1985). For the charged-current interactions on nucleons, as well as the neutral-current scattering interactions, we include corrections for weak magnetism following Horowitz (2002). We also include inelastic scattering of neutrinos on electrons following Bruenn (1985).


For the simulations that include rotation, we map the progenitor model onto the cylindrical grid via an artificial rotation profile,

where is the spherical radius for a given cylindrical radius R and symmetry axis coordinate z, Ω0 is the central angular speed of the star, and A is the differential rotation parameter. Using this same scheme, Pajkos et al. (2019) find that the parameter A strongly correlates with the stellar core compactness (O'Connor & Ott 2011) and calculate an optimal value of A = 1021 km for the compactness ξ2.5 = 0.2785 of the 20 M⊙ progenitor used here.

2.2. Equation of State
In this study we focus on nucleonic EOSs where neutrons and protons interact via a Skyrme-type force while immersed in a degenerate gas of noninteracting electrons, positrons, and photons. 5 Because leptons and photons are considered noninteracting, for an EOS at a given state their contribution to thermodynamics of the system will be the same regardless of the interactions between nucleons. Furthermore, nucleon contributions dominate the EOS only at densities near or above nuclear saturation density, i.e., number density nsat ≃ 0.155 baryons fm−3 or mass density ρsat ≃ 2.7 × 1014 g cm−3, where matter is in a homogeneous state. Moreover, since GWs are mainly emitted from the PNS, which has for the most part densities in excess of one to a few nsat, we discuss only the bulk nucleon contributions next. For details on the low-density part of the EOS, n ≲ nsat, where nucleons may cluster to form nuclei, and the lepton and photon contributions, see Lattimer et al. (1985), Lattimer & Swesty (1991), and Schneider et al. (2017).
The FLASH simulation code is set up to solve the hydrodynamic equations of motion where the properties of matter are obtained from the state ζ = (n, y, T) of the system. Here n = nn + np is the baryon number density, where nn (np ) is the neutron (proton) number density, y = np /n is the proton fraction, and T is the temperature. We assume that the system is everywhere charge neutral, i.e., the number of protons is equal to the number of electrons minus positrons, and in thermal equilibrium. As an example of the thermodynamic quantity of the EOSs we study, we consider the finite-temperature nucleonic energy per baryon

Above,  kin (pot) is the specific kinetic (potential) energy. In Skyrme-type models, B
(n, y, T) is a function parameterized to fit the properties of bulk nuclear matter and finite nuclei at zero temperature (Lattimer & Swesty 1991; Schneider et al. 2019b). Thus, in this class of models, the potential term is temperature independent and the temperature dependence is fully contained in the kinetic term, to be discussed later. With this in mind, we rewrite Equation (2) in the form
kin (pot) is the specific kinetic (potential) energy. In Skyrme-type models, B
(n, y, T) is a function parameterized to fit the properties of bulk nuclear matter and finite nuclei at zero temperature (Lattimer & Swesty 1991; Schneider et al. 2019b). Thus, in this class of models, the potential term is temperature independent and the temperature dependence is fully contained in the kinetic term, to be discussed later. With this in mind, we rewrite Equation (2) in the form

where


Expression (3) is useful, as thermal contains only temperature-dependent terms, while cold is the zero-temperature EOS. Therefore, cold may be written as a series expansion of the specific energy around nuclear saturation density for isospin symmetric nuclear matter (nn
= np
), i.e.,

As usual in the literature, and is the isospin asymmetry. The expansion in Equation (5) assumes quadratic approximation for the isospin dependence and neglects nonanalytic terms in δ (see Kaiser 2015; Wen & Holt 2021). Up to second order, the isoscalar (is) and isovector (iv) expansion terms are (e.g., Piekarewicz & Centelles 2009; Margueron et al. 2018)




and we recall that, by definition of the nuclear saturation density nsat, the linear term in x of is(x) vanishes. The empirical parameters shown in the expansion Equation (6) are the energy per baryon at nuclear saturation density sat, the isoscalar incompressibility modulus Ksat, the symmetry energy sym and its slope Lsym, and the isovector incompressibility modulus Ksym. In principle, all of the expansion parameters in Equation (6) can be determined experimentally, with varying degrees of difficulty that usually increase with the order of the parameter. Often, isovector empirical parameters are harder to constrain than their isoscalar counterparts.
We now discuss the kinetic energy per baryon term

Here τt
≡ τt
(n, y, T) is the kinetic energy density, is the effective mass for a nucleon of type t (t =n, p), and, in the zero-temperature limit, . We highlight that the quantities τt
do not depend on any model parameters besides the ones that determine the effective masses (Lattimer & Swesty 1991; Schneider et al. 2017). Hence, the finite-temperature component of the EOS, represented here by thermal, is fully determined by the effective masses of nucleons (Prakash et al. 1997; Constantinou et al. 2014).



In Skyrme-type models, the inverses of the nucleon effective masses have a simple linear relation with nucleon densities. They are computed from

where αi
are Skyrme parameters and mt
the nucleon vacuum masses. For nt
, if t = n, then −t = p, and vice versa. The parameters αi
are set to reproduce the desired effective mass behavior. Because there are only two such parameters, is fully determined by choosing the value of in two independent points in phase space (n, y) or, alternatively, (x, δ). Note that other forms, some considerably more complicated, for the effective masses are possible and, likely, more realistic (Prakash et al. 1997; Constantinou et al. 2015; Schneider et al. 2019a; Huth et al. 2021). Once the parameters that determine the effective mass of nucleons have been computed, the other parameters of the model, which regulate the potential energy term pot but were not discussed here for brevity, may be obtained from the nuclear physics constraints in the expansions of Equation (6).


Based on the model discussed above, Schneider et al. (2019b) constructed 97 Skyrme-type EOSs using open-source code SROEOS (Schneider et al. 2017). They built a baseline EOS by fixing 10 EOS observables to their most likely values based on current nuclear physics constraints combined from Danielewicz et al. (2002), Antoniadis et al. (2013), Nättilä et al. (2016), and Margueron et al. (2018); see Table 1 for their values. From the baseline EOS, Schneider et al. (2019b) allowed 1σ and 2σ variations in pairwise combinations of empirically accessible parameters in four sets: sM
= {m⋆, Δm⋆}, sS
= {sym, Lsym}, sK
= {Ksat, Ksym}, and . Here is the effective mass of neutrons at nuclear saturation density for symmetric nuclear matter (SNM),
6
is the neutron–proton mass difference in the limit of pure neutron matter (PNM). and is the pressure of SNM and PNM at 4nsat, respectively. Two parameters were fixed in every EOS: the nuclear saturation density nsat = 0.155 baryons fm−3 and sat = 15.8 MeV baryon−1, as their uncertainties are small enough to barely affect core-collapse physics. The choice of pressure at a large density as a constraint, which is computed from the relation , to determine the parameters of the Skyrme model is due to the fact that the pressure of nuclear matter at large densities is significantly better constrained through a combination of high-energy collision analysis and computational models (Danielewicz et al. 2002) and the maximum observed mass of NSs (e.g., Antoniadis et al. 2013) than the higher-order terms in the expansions of Equation (6), which can only be poorly constrained by a mixture of theoretical modeling and astrophysical constraints (Margueron et al. 2018; d'Étivaux et al. 2020).






Table 1. Nuclear Matter Properties of the Baseline EOS, Following Schneider et al. (2020)
| Quantity | Baseline | Variation 2σ | Unit |
|---|---|---|---|
| m⋆ | 0.75 | 0.20 | mn |
| Ksat | 230 | 30 | MeV baryon−1 |
| nsat | 0.155 | fm−3 | |
|
sat
| −15.8 | MeV baryon−1 | |
|
sym
| 32 | MeV baryon−1 | |
| Lsym | 45 | MeV baryon−1 | |
| Ksym | −100 | MeV baryon−1 | |
| Δm⋆ | 0.10 | mn | |
| 125 | MeV fm−3 | ||
| 200 | MeV fm−3 | ||


Note. See Schneider et al. (2019b) for further details. 2σ variations are shown for the two parameters we investigate in this work.
Download table as: ASCIITypeset image
Finally, a comment on the uncertainties σ is warranted. The variations around the baseline values for m⋆, Δm⋆, and the expansion terms in Equation (6) were determined by Schneider et al. (2019b) combining analysis of experimental results and theoretical models by Margueron et al. (2018), astrophysical observations by Antoniadis et al. (2013) and Nättilä et al. (2016), and modeling of heavy ion collisions by Danielewicz et al. (2002). These uncertainties thus have to be taken with caution, as not only are they approximate, but the values of some observables may also be correlated by theory and observations (see, e.g., Tews et al. 2017; Margueron et al. 2018; d'Étivaux et al. 2020).
It is unreasonable, considering current computational resources, to perform multidimensional CCSN simulations for approximately 100 EOSs. Nonetheless, we can still learn a great deal from a smaller subset of simulations. We thus focus on variations in only two empirical parameters and determine their effects on GW signatures. We perform simulations only for the baseline EOS of Schneider et al. (2019b) and four EOSs where either m⋆ or Ksat differs by 2σ from their baseline values; see Table 1. These choices are motivated from the observation that Ksat (m⋆) has a strong (weak) effect on the cold NS structure, while it has a weak (strong) effect on the structure of a hot PNS. Since PNSs are hot soon after their birth, we expect the effect of varying m⋆ while keeping all else fixed to be much more significant in our simulations than varying Ksat while keeping every other empirical parameter, including m⋆, constant. This is because variations in m⋆ modify the temperature dependence of the EOS, while modifications in Ksat only affect the cold component. Hence, we expect a similar correlation in our results. Moreover, the relative uncertainty in m⋆ is approximately twice that of Ksat. Particularly, our baseline simulation has m⋆ = 0.75 (specified as a fraction of the neutron mass vacuum value) and Ksat = 230 MeV baryon−1. The 2σ value for m⋆ (Ksat) below baseline is 0.55 (200 MeV baryon−1) and above baseline is 0.95 (260 MeV baryon−1).
Besides studying EOS variations, we perform two additional simulations for both m⋆ = 0.55 and m⋆ = 0.95 that include rotation with Ω0 = 1 rad s−1 and Ω0 = 2 rad s−1. See Table 2 for an overview of the nine simulations performed in this paper.
Table 2. Overview of the Simulations Performed That Vary in the Effective Mass Parameter, Rotation Rate, and the Isoscalar Incompressibility Modulus Parameter
| m⋆ | Ksat | Ω0 | Label |
|---|---|---|---|
| (mn ) | (MeV baryon−1) | (rad s−1) | |
| 0.75* | 230* | 0 | m0.75/k230 |
| 0.55 | 230* | 0 | m0.55 |
| 0.95 | 230* | 0 | m0.95 |
| 0.55 | 230* | 1 | m0.55r1 |
| 0.95 | 230* | 1 | m0.95r1 |
| 0.55 | 230* | 2 | m0.55r2 |
| 0.95 | 230* | 2 | m0.95r2 |
| 0.75* | 200 | 0 | k200 |
| 0.75* | 260 | 0 | k260 |
Note. An asterisk indicates that values are the baseline from Table 1.
Download table as: ASCIITypeset image
All of the EOS tables, and each of the corresponding NuLib tables used in this work, are available at https://doi.org/10.5281/zenodo.4973545.
2.3. Gravitational Wave Extraction
To extract the GW signal measured by a distant observer, we adopt the standard formula utilizing the second time derivative of the trace-free quadrupole moment. This quadrupole moment in the slow-motion, weak-field formalism is given by (Blanchet et al. 1990; Finn & Evans 1990)

where the indices range over (x, y, z), δij is the Kronecker delta, and ρ is the source energy density. For axisymmetric sources, the only independent component of the quadrupole moment is Izz . Unless otherwise stated (for example, in Section 3.4), we compute the first derivative in terms of the fluid velocity, vi , via the analytic expression (Finn & Evans 1990),

and the second time derivative is computed numerically. The axisymmetric GW strain for an observer located at the equator a distance D away from the source is then given as (Thorne 1980)

where G is the gravitational constant and c is the speed of light.
The GW spectrograms are extracted by short-time Fourier transforming (STFT) the GW signal,

into its frequency domain f. τ is the time offset of the Hann window function H(t − τ) (see, e.g., Murphy et al. 2009). The sampling frequency of our simulation output is ∼ 2 × 106 Hz, which is reduced in the post-processing to ∼20,000 Hz. Unless otherwise stated, we use a Hann window width of 40 ms and compute STFTs with a Δτ of 3.6 ms.
To investigate the hypothetical detectability of our simulations, we follow Murphy et al. (2009) to calculate the dimensionless characteristic strain (Flanagan 1998),

with the spectral energy density

where denotes the Fourier transform of d2 Izz /dt2.

3. Results
In this section, we describe the main results of our study. We first present results for three axisymmetric CCSN simulations that show how the effective mass affects the PNS evolution and GW signal for the nonrotating 20 M⊙ progenitor of Woosley & Heger (2007). Then, we explore the effect of two rotation rates, Ω0 = 1 and 2 rad s−1, in the GW signal considering the two extreme cases studied for the effective mass. Finally, as a matter of interest and to reaffirm the findings of Schneider et al. (2019b), we explore the impact of the isoscalar incompressibility, Ksat, within its current experimental constraint. Recall that we label the simulations following the convention in Table 2. Following this, we explore the spatial origin of the GWs in our models and the power gap. All of the GW wave strains reported in this work are available at https://doi.org/10.5281/zenodo.4973545.
3.1. Effective Mass
When investigating the effective mass dependence of GWs for nonrotating progenitors, the three simulations we compare are carried out for a minimum of 860 ms post-bounce. Each stellar core collapses until the EOS stiffens and bounce occurs (at 318.5 ± 0.1 ms after the onset of the simulation), followed by the formation and outward propagation of the shock wave that initially stalls at ∼170 km at ∼100 ms after bounce. The top panel of Figure 1 shows the evolution of the mean shock radius. Shock revival occurs for m0.95 at ∼300 ms post-bounce and for m0.75 at ∼900 ms post-bounce, whereas the simulation with the lowest value of the effective mass parameter, m0.55, does not explode in the simulated time. This is consistent with the generally increasing neutrino heating expected for higher effective masses (bottom panel of Figure 1), making conditions more favorable for shock runaway (Janka 2017; Schneider et al. 2019b; Yasin et al. 2020). The difference in neutrino heating between the simulations is a reflection of the neutrino luminosity and neutrino mean energy, both of which increase with the effective mass. We remark that this trend is seen for all neutrino/antineutrino species, with eventual deviations related to the times of explosion.

Figure 1. Evolution of the mean shock radius (top panel) and the neutrino heating (bottom panel). Shock revival occurs for m0.95 at ∼300 ms post-bounce and for m0.75 at ∼900 ms post-bounce, whereas the simulation with the lowest value of the effective mass parameter does not explode in the simulated time. This is generally consistent with the increased electron-type neutrino luminosity and mean energies and therefore neutrino heating for the simulations with the higher effective mass, making conditions more favorable for shock revival.
Download figure:
Standard image High-resolution imageNeutrino heating not only provides the shock with thermal support and aid in shock revival but also drives turbulence and convection in the gain region (Couch & Ott 2015) that imprints on the GWs. Figure 2 shows the GW signals. While we note a strong signal at epochs ≲70 ms that is typically attributed to prompt convection (Murphy et al. 2009), our analysis focuses on epochs after 0.1 s when the quiescent phase has ended and the excitation of PNS oscillations begins. During this phase, such PNS oscillations strongly dominate the GW signal. The amplitude of the GWs increases with higher effective mass. We attribute this, at least in part, to the increasingly (neutrino-driven) "violent" gain region in simulations with higher effective mass, correlating with the amplitude of the PNS oscillations via accretion plumes striking the convectively stable layer below (Murphy et al. 2009; Yakunin et al. 2015). Radice et al. (2019) show, albeit in 3D, that the energy radiated in GWs is proportional to the amount of turbulent energy accreted by the PNS. This relation is further supported via analytic arguments in Powell & Müller (2019). Here, we note (but do not show) that the total energy radiated increases with the effective mass throughout all evolutionary stages above 0.1 s. It is worth noting that the development of an explosion, as long as there is sustained accretion, can lead to GWs with an amplitude at a level higher than it would have been without an explosion (Powell & Müller 2019; Radice et al. 2019); therefore, the high GW amplitude seen in m0.95, and to some extent in m0.75, after the onset of explosion can be in part attributed to this as well. We return with an in-depth analysis and discussion regarding the source of the GWs in Section 3.4.

Figure 2. GW signals for models varying in the effective mass parameter as measured from an arbitrary distance (left axis) and from 10 kpc (right axis), assuming that the observers are standing in the equatorial plane of the source. Generally, the GW amplitude increases with a larger value of the effective mass parameter. Around 0.6 s, the signal for the m0.95 model undergoes a shift in the positive direction due to a prolate shape of the shock during explosion.
Download figure:
Standard image High-resolution imageAs seen in previous studies (e.g., Murphy et al. 2009; Yakunin et al. 2015), we observe a prolate shape of the shock for the m0.95 model that is reflected in the GW signal by a shift in the positive direction at ∼0.6 s.
In Figure 3, we show the spectrograms where the typical, dominant PNS oscillation GW signal starts at ∼0.1 s and increases in frequency as the PNS cools and contracts. In all three spectrograms, we note a particular region that appears to lack emission, located at roughly constant frequency (∼1.2 kHz) throughout the simulation time. Morozova et al. (2018) were the first to address this "power gap," which they could not attribute to a numerical artifact, and thus do not rule out a physical origin. As the dominant oscillation mode evolves toward the gap region from below, an interaction appears to take place with another mode above the power gap, consistent with the avoided-crossing description in Morozova et al. (2018) and Sotani & Takiwaki (2020), resulting in the lower-frequency mode flattening out in frequency and dropping in amplitude, while the other higher-frequency mode rises in frequency and amplitude. The crossings between modes occur at ∼650, ∼850, and ∼1000 ms for the m0.95, m0.75, and m0.55 simulations, respectively. We report our further exploration of the power gap in Section 3.5.

Figure 3. Logarithmic spectrograms of the GW signal for the three simulations varying in the effective mass. For a direct comparison, they are normalized across their global maximum above 100 ms. There are three distinct features in the spectrograms: (1) strong emission over a large range of frequencies ≲70 ms typically attributed to prompt convection; (2) a narrow band of high power that increases in frequency with time, the dominant PNS oscillation frequency; and (3) a region located at approximately constant frequency (∼1.2 kHz) that appears to lack emission, the "power gap" that we explore in Section 3.5.
Download figure:
Standard image High-resolution imageWe show in Figure 4 the radius of the PNSs (top panel) and the three spectrograms overlaid on one another (bottom panel). We define the PNS radius as the maximum distance to where the density is 1011 g cm−3, which leads to sporadic jumps in the evolution profile of the early-exploding run, m0.95. The dashed lines in the spectrogram plot are quadratic fits of the form At2 + Bt + C to the collection of frequency points of most power (one extracted per STFT time step of 3.6 ms). The PNS radius and the frequency of the dominant oscillation mode are clearly effective mass dependent. It has been realized through asteroseismology studies (e.g., Morozova et al. 2018; Torres-Forné et al. 2019a) and works using semianalytical fits to the dominant frequency (e.g., Murphy et al. 2009; Cerdá-Durán et al. 2013; Müller et al. 2013; Pan et al. 2018; Pajkos et al. 2019; Powell & Müller 2019, 2020; Torres-Forné et al. 2019a; Sotani & Takiwaki 2020) that the mass and radius are the primary determinants of the dominant PNS oscillation frequency. In our simulations, the masses of the accreting PNSs remain equal until ∼0.5 s after bounce and differ by at most 4% by tpb = 860 ms (which is the end of run m0.95) owing to explosion. However, the EOS dependence results in relatively large variations of the PNS radius, having evolved differently since bounce and differing by ∼15% between our two extreme cases at tpb = 860 ms. Hence, the radius holds the dominant role in setting the frequency and accounts for the ∼36% difference in the peak frequency at 860 ms between runs m0.55 and m0.95. In summary, as expected owing to the role of the effective mass on the thermal properties outlined in Schneider et al. (2019b) and mentioned above, we find that a higher value of the effective mass parameter m⋆ yields a more compact PNS, producing a higher oscillation frequency.

Figure 4. Top panel: PNS radius defined as the maximum radius where the density is at least 1011 g cm−3. Bottom panel: overlaid spectrograms of the three models varying in effective mass and overplotted with second-order polynomial fits to the frequency points of most power. The window over which the fit is made is from 0.1 s to the end of the simulation time. The polynomial coefficients are shown in the upper left corner.
Download figure:
Standard image High-resolution imageFigure 5 shows the characteristic strain, hchar (Equation (13)), where we assume a distance of 10 kpc to the source. The frequency corresponding to the largest hchar, the so-called peak frequency, is shifted to higher frequencies and higher power when increasing the effective mass, i.e., when increasing the PNS compactness. The peak frequencies are located around 1–2 kHz, indicating that these amplitudes are due to the PNS oscillations. The power gap near 1.2 kHz is also clearly seen in this plot. Furthermore, because the peak frequency rises slower in the m0.55 run and the window over which hchar is calculated is limited to the maximum common run time, tpb = 860 ms, the characteristic strain for this run above the power gap is lower than below the gap. This is not the case for the m0.75 and m0.95 runs, where the peak frequency crosses the power gap ≃200 ms earlier. Another feature we observe is a small shoulder of excess emission around ∼100 Hz, which could be explained by instabilities such as neutrino-driven convection and turbulent flows in the gain region, as well as the SASI, for which the GW radiation is typically emitted at such low frequencies (e.g., Cerdá-Durán et al. 2013; Pan et al. 2018; Pajkos et al. 2019). For the m0.95 run there is also an excess emission at frequencies ≲100 Hz due to the asymmetric explosion.

Figure 5. Characteristic strain as a function of frequency, assuming a distance to the source of 10 kpc. This is calculated between 100 and 860 ms post-bounce. The peak frequency and its corresponding strain increase as the value of the effective mass increases. The gray dashed line represents the sensitivity bounds of Advanced LIGO (Barsotti et al. 2018), indicating the potential of detecting GW signals from a Galactic CCSN with similar physical properties to these models.
Download figure:
Standard image High-resolution imageThe gray dashed line in Figure 5 represents a sensitivity curve of Advanced LIGO (Barsotti et al. 2018). The frequency and amplitude ranges are well within the bounds of the sensitivity curve. Caution should be taken when concluding their detectability since 2D simulations typically overpredict the signal strength compared to 3D simulations. Several 3D studies report on amplitudes decreasing by a factor of 10−20 in their 2D/3D comparisons (Andresen et al. 2017; O'Connor & Couch 2018b; Mezzacappa et al. 2020), which would make a detection at 10 kpc more marginal (see, e.g., Szczepanczyk et al. 2021). Although the amplitude and detection prospects may need revision in 3D simulations, we do not expect the evolution of the dominant PNS oscillation frequency to change significantly when going from 2D to 3D owing to an approximately preserved evolution of PNS mass and radius. 3D studies with 2D counterparts support this reasoning (e.g., O'Connor & Couch 2018a; Radice et al. 2019), meaning that the quadratic fits (recall Figure 4) and the EOS dependence are likely preserved for more realistic, 3D, CCSNe.
3.2. EOS and Rotation
For our models with the highest and lowest values of the effective mass parameter, we run additional simulations using rotation profiles with central angular speeds of 1 and 2 rad s−1 at the onset of collapse (see Equation (1)). Figure 6 shows the mean shock radius (top panel) and the neutrino heating (bottom panel). In contrast to the nonrotating m0.95 simulation, no shock revivals occur for either m0.95r1 or m0.95r2 during their ∼0.5 s simulation time.

Figure 6. Top panel: evolution of the mean shock radius comparing nonrotating models (solid lines), Ω0 = 1 rad s−1 rotation (dashed–dotted lines), and Ω0 = 2 rad s−1 rotation (dotted lines) for the m⋆ = 0.95 (blue) and the m⋆ = 0.55 (green) EOSs. When rotation is included, no shock revivals occur during the ∼0.5 s simulation time. Bottom panel: neutrino heating. Due to centrifugal support, rotating progenitors produce less compact PNSs, releasing less gravitational binding energy in the form of neutrinos and impacting the neutrino heating.
Download figure:
Standard image High-resolution imageDue to centrifugal support, matter does not settle as deeply in the gravitational potential, releasing less gravitational binding energy during core collapse. This results in lower neutrino luminosity and slower contraction of the PNS (Summa et al. 2018; Westernacher-Schneider et al. 2019). When we increase the rotation rate, we observe a significant nonlinear decrease of the neutrino/antineutrino luminosities (as well as mean energies), which is reflected in the neutrino heating (Figure 6). Other processes may factor into the observed heating also: for the most rapidly rotating models, the centrifugally supported shocks are located at a large radius, increasing the region where neutrinos may deposit energy. On the other hand, when including rotation, convection is inhibited owing to a positive angular momentum gradient according to the Solberg–Høiland stability criterion (Endal & Sofia 1978; Fryer & Heger 2000), which is known to result in less prominent neutrino heating (Murphy et al. 2013).
Figure 7 shows the GW signal for the models varying in both the effective mass and rotation rate. Expectedly (e.g., Pajkos et al. 2019), the two bottom panels illustrate how the signal becomes increasingly muted with a higher rotation rate. As demonstrated by the two neighboring panels on top, and contrary to the nonrotating simulations, we do not find any effective mass dependence of the GW amplitude for our simulations that include rotation. This is of special note for the 1 rad s−1 models, as they still exhibit an effective mass dependence in neutrino heating. The centrifugal support stabilizes the gain region to the extent that the different amounts of neutrino heating have little to no impact on the GW amplitude. Furthermore, it takes longer for the convection instabilities in the 2 rad s−1 models to become fully nonlinear in the gain region, and thus these simulations exhibit an extended quiescent phase until ∼150–170 ms. Since these simulations are axisymmetric, the suppression of GW emission we see here due to rotation could be overestimated as compared to 3D. Furthermore, for sufficiently high rotation rates one expects nonaxisymmetric instabilities to give rise to potentially strong GWs (Scheidegger et al. 2010; Takiwaki & Kotake 2018; Andresen et al. 2019).

Figure 7. GW signal for the models varying in both effective mass and rotation rate. Top left panel: models with Ω0 = 1 rad s−1. Top right panel: models with Ω0 = 2 rad s−1. Middle panel: the m⋆ = 0.95 models. Bottom panel: the m⋆ = 0.55 models. The two bottom panels emphasize how the signal becomes increasingly muted with higher rotation rate. The two panels on top show that the signal is muted to similar amplitude for equal rotation rates. Thus, the effective mass dependence of the GW amplitude is washed out by the somewhat centrifugally stabilized gain region.
Download figure:
Standard image High-resolution imageFigure 8 shows the PNS radii (top panel) and the polynomial fits to the frequency points of most power (bottom panel). Correlated with the radius (which increases nonlinearly with higher rotation rate), the frequency of the dominant PNS oscillation mode decreases with increasing rotation. The effective mass dependence of this mode is still clear for the 1 rad s−1 simulations, with rotation at this level only reducing the peak frequency by ∼10% from the respective nonrotating counterparts. For the 2 rad s−1 models, due to the relatively little PNS excitation (and late onset thereof; see Figure 7), the frequency distribution of power is much broader and at a lower level. Nevertheless, using a linear fit to the frequency points of most power for these rapidly rotating models (see the bottom panel of Figure 8), we see a further reduction in the peak frequency and remark that the rapid rotation washes out any discernible frequency dependence that the slightly different PNS radii of the fast-rotating simulations would cause.
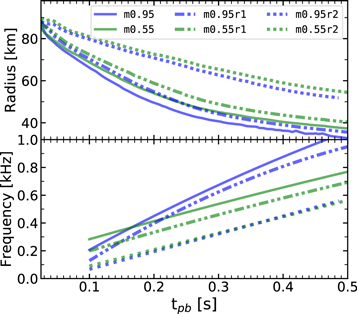
Figure 8. The PNS radius (top panel) for the models varying in both effective mass and rotation rate, as well as the polynomial fits of the form At2 + Bt + C to the frequency points of most power (bottom panel). These frequencies are extracted from the spectrograms (one per time step of 3.6 ms), and we only use frequencies above 120 Hz. For the 2 rad s−1 models, we use a linear fit due to a less well-defined dominant mode in the spectrogram (see text). The effective mass dependence of the dominant PNS oscillation frequency is still seen for the 1 rad s−1 models, but not the 2 rad s−1 models.
Download figure:
Standard image High-resolution image3.3. Incompressibility
The results above highlight how the compactness of the PNS at the time of formation and its cooling rate are the underlying factors of the GW signatures (under otherwise-similar conditions).
For the simulations where we investigate the effect of the incompressibility modulus, the PNS masses and radii are nearly identical across the models during their ∼0.6 s simulation time. This agrees with the spherically symmetric results of Schneider et al. (2019b). Expectedly, we see no systematic differences in the GW signatures between the three models, and any minor differences are likely stochastic. Figure 9 shows the characteristic strain as a function of frequency, which reflects the similarity in both amplitude and frequency between the three simulations. We note that the decrease in GW emission in the 1.0–1.2 kHz range is even more evident in Figure 9 now that the characteristic strains of the simulations hchar overlap. We discuss the incompressibility dependence of the gap further in Section 3.5.

Figure 9. Characteristic strain as a function of frequency for the models varying in the incompressibility modulus, Ksat, assuming a 10 kpc distance to the source. This is calculated between 100 and 580 ms post-bounce. The gray dashed line represents the sensitivity bounds of Advanced LIGO (Barsotti et al. 2018). There is little to no dependence of the GW signal on the incompressibility modulus.
Download figure:
Standard image High-resolution image3.4. Source of the GWs
In a typical PNS there are two convectively stable regions, one in the inner core and one that composes the outer shell of the PNS that faces the turbulent post-shock region. According to canonical wave theory (Handler 2013; also see Gossan et al. 2020 for a direct application in CCSNe), apart from oscillatory p-modes (where pressure acts as a restoring force) at high frequency, these stable regions may also house g-modes at lower frequencies (where buoyancy acts as a restoring force). These excitations may emit GWs at select eigenmode frequencies when excited. Often, a buoyantly unstable region separates the core and the outer shell, the PNS convection zone. In 2D, many groups have attributed their GW signal to g-modes from the outer shell (Cerdá-Durán et al. 2013; Müller et al. 2013; Pan et al. 2018). A viable perturbing mechanism is accretion plumes impinging onto the PNS from the violent gain region above (Murphy et al. 2009), also recognized in 3D (O'Connor & Couch 2018b; Powell & Müller 2019; Radice et al. 2019; Andresen et al. 2021).
Adding to the possibilities of strong GW sources, Mezzacappa et al. (2020) conclude that after a few hundreds of milliseconds, PNS convection takes over as the dominant source of GW emission in their 3D study. Andresen et al. (2017) report that the dominant source of emission in their 3D runs originates from the bottom end of the convectively stable surface layer, driven by convective overshoot from the convection zone below rather than by accretion from above, and further show the same scenario for a 2D counterpart to a 3D run. It should also be mentioned that PNS convection has previously been recognized as a GW source and as a possible g-mode excitation mechanism in 2D (Marek et al. 2009; Murphy et al. 2009; Müller et al. 2013) and in 3D (Müller et al. 2012), although not established as a dominant source pre-explosion. Furthermore, Torres-Forné et al. (2019b; in 2D) point toward the stable inner core as the region responsible for the dominant emission in their study, and they support the hypothesis that the dominant emission is always a g-mode (Torres-Forné et al. 2019a). For Morozova et al. (2018) and Sotani & Takiwaki (2020) in 2D, and for Radice et al. (2019) in 3D, their dominant source of emission after roughly 0.4 s stems from the fundamental quadrupolar mode, having transitioned from a g-mode. In 3D, Powell & Müller (2019) attribute their high-frequency emission to g-modes, and in their complimentary work using other progenitors in Powell & Müller (2020), to the f-mode.
It is possible that the dominant GW emission is strongly model dependent and that the scenery of strong GW emission in CCSNe is as rich as the literature suggests. For example, with regard to the GW emission from the PNS, the results of Mezzacappa et al. (2020) resemble those of Andresen et al. (2017) and Andresen et al. (2019), where PNS convection is the source or driving force, while the findings in Andresen et al. (2021) support Radice et al. (2019) and Powell & Müller (2019), where nonradial motion in the post-shock region is recognized as the main forcing mechanism. Using analytic arguments, Powell & Müller (2019) speculate that the relative importance between these two excitation mechanisms may be determined by the difference in convective energy inside and outside the PNS, where the latter is closely tied together with the explodability of the model (such as the neutrino heating and convective Mach number). It is further possible that the situation is more generic and a stronger consensus will emerge as PNS asteroseismology techniques and classification methods become even more sophisticated and widely used. However, only a couple (Andresen et al. 2017; Mezzacappa et al. 2020) spatially decompose their GW signals from the actual simulation. Thus, to shed light on the excitation mechanism, we encourage the combination of self-consistent perturbation analysis and spatially resolving the emission. In this work, we refrain from firmly diagnosing our dominant emission with a particular mode; we leave this to future work. Instead, we attempt to localize the source of the GWs in our simulations while simultaneously highlighting two analytical procedures, hoping to provide value to future studies in unveiling the mechanism and source of GWs:
(1) In Appendix A we remark that caution needs to be taken when calculating the spatial distribution of GWs since the often-used analytic expression for the first time derivative of the quadrupole moment (Equation (10) in Cartesian and Equation (A5) in spherical coordinates) neglects a surface term when considering only a portion of the PNS. This term, of course, vanishes when calculating the GW emission from the whole star. In that appendix we show how, when instead numerically taking two time derivatives of the quadrupole moment itself, the apparent emission region changes. In particular, emission that was previously seemingly from the convection zone, where the surface terms are largest, decreases.
(2) In Appendix B we highlight that the location where the energy density associated with a particular mode (Morozova et al. 2018; Torres-Forné et al. 2018, 2019b; Sotani & Takiwaki 2020) is most concentrated, does not necessarily overlap with the region emitting the largest contribution of GWs owing to the excitation of that mode. This is for two reasons: (a) because significantly more mass is located farther out at larger radii, even though the energy density is lower, and (b) the added lever arm of the radius (squared) in the quadrupole moment. As a consequence of this analysis, we show that the radial profiles of the GW emission at any particular frequency, computed either from a perturbation analysis or dynamically from the simulation, agree remarkably well in the PNS itself.
With these in mind, we attempt to localize the source of the GW emission in our 2D simulations and place the results in the context of the literature. In Figure 10, we show the spatial distribution of the radial velocity (top panels) and radial profiles of the GW spectrogram (bottom panels) for t = 400 ms (left), t = 800 ms (middle), and t = 1000 ms (right) post-bounce for our baseline simulation, m0.75. The GW signals in these spectra are calculated in the post-processing of high-cadence data by taking two numerical time derivatives of the contribution to the zz component of the quadrupole moment (i.e., Equation (9)) contained in each spherical shell (and multiplying by the constants outside the double derivative in Equation (11)). We note that this is different than using a radially decomposed Equation (10) and taking one additional time derivative; we refer the reader to Appendix A for the important details. We obtain the frequency dependence by multiplying this radially decomposed GW signal by a 40 ms Hann window centered at each time specified above, and finally Fourier transform it. To the left of each spectrogram profile we show the normalized projected power spectral density. We note that both the profile and projection are logarithmic. In each spectrogram profile we also plot the turbulent energy flux (white solid lines for positive values and dashed for negative values). Similar to Equations (15)–(17) in Andresen et al. (2017), the turbulent energy flux, fm , is calculated via

where angled brackets denote an angular average, ρ denotes mass density, and vr is the radial velocity of the fluid. Here the primed quantities are the deviations from the angle average, e.g., . To reduce the stochastic noise of fm in our 2D simulations, the curves in Figure 10 are an average of all the turbulent energy flux profiles obtained over the 40 ms window. We also include the Brunt–Väisälä frequency (black lines) following Mezzacappa et al. (2020),


where Ylep = Ye + Yν , and both P and s include contributions from the neutrinos as well. For these neutrino contributions, we assume a thermal distribution of neutrinos at densities higher than ∼ ρ = 1012 g cm−3 (Kaplan et al. 2014). While in principle the convective region should have negative , we only see this for the outer part of the convection zone for the t = 400 ms profile, and therefore we rely on the turbulent energy flux to define the convection zone. For each of the three times, we mark the location of ρ = 1011, 1013, and 2 × 1014 g cm−3 with dashed vertical lines in the spectrograms and as contours in the radial velocity plots.


Figure 10. Spatial distributions of the radial velocity (top panels), where red (blue) colors denote positive (negative) radial velocities, as well as radial profiles of the GW spectrogram (bottom panels) at times t = 400 ms (left), t = 800 ms (middle), and t = 1000 ms (right) after bounce for model m0.75. In contours (top) and vertical dashed lines (bottom) we denote the location of ρ = 1011, 1013, and 2 × 1014 g cm−3. These roughly divide the PNS core, PNS convection zone, the convectively stable PNS surface layer, and the gain region (and beyond). To the left of each spectrogram profile we show the projected power spectral density, with an explicit dashed line at 1250 Hz to highlight the location of the power gap. On each of the spectrogram profiles we show the Brunt–Väisälä frequency (Equation (16)) in black (red denotes negative values of ) and the turbulent energy flux (Equation (15)) in white (dashed denotes negative values).

Download figure:
Standard image High-resolution imageIn Figure 10, the convective region is traced very well by the width of the negative part of the turbulent energy flux profile. The negative sign here is understood by the nature of fluid motion in a convection zone. The heavier (denser) fluid is advected down and the lighter (less dense) fluid is buoyantly lifted up, in both cases . The turbulent energy flux will thus always be negative in the convective layer. The reverse is true in the overshoot layer above the PNS convection zone, as the overshoot plumes are denser than the local average, explaining the small positive peak in the turbulent energy flux just above the convection zone in Figure 10. Hence, as seen in the figure, the radius corresponding to ρ = 2 × 1014, 1013, and 1011 g cm−3 roughly divides the PNS core, the PNS convection zone, the convectively stable PNS surface layer, and the gain region (and beyond). This is further highlighted by the density contours in the radial velocity plots in the top panel of Figure 10, where funnels of fast-moving matter in opposite directions are seen between ρ = 1013 g cm−3 and ρ = 2 × 1014 g cm−3, namely, convection sustained and driven by continued neutrino diffusion out of the core and the maintenance of the lepton gradients. For completeness, we show in Figure 11 properties of the PNS convection zone over the course of the simulations for each nonrotating simulation. Following the PNS radius trend in Figure 4, the PNS convection zone is located at a larger radius for simulations with a lower effective mass. While the smallest (largest) in volume, the m0.95 (m0.55) simulation shows the largest (smallest) PNS convection zone mass and kinetic energy at early times (t ≲ 300 ms). At late times, the mass contained in the convection zone levels out and the ordering inverts, with the m0.95 simulation having less mass than the others. This may be due to the explosion in the m0.95 simulation. At the level explored here, Ksat does not impact any of the PNS convection properties.


Figure 11. Top panel: radial boundaries for the PNS convection zone as defined by the location where the turbulent flux is (inner) and fm = 0 (outer). Middle panel: PNS convection zone mass. Bottom panel: PNS convection zone total kinetic energy. Data are smoothed over 20 ms.

Download figure:
Standard image High-resolution imageRegarding the source of the GWs and the radially decomposed spectrograms in Figure 10, resolving a precise location in the star where the emission occurs is difficult. The emission region is extended, which is supported by the results shown in Appendix B, where we show, for these select times, the radial profile of the GW emission compared to the predictions from a perturbation analysis. However, the figure provides a strong indication that the dominant emission in our simulations stems from the convectively stable surface layer, with a tendency toward the bottom end of this layer, the convective overshoot region. Characteristic of g-modes, the ρ = 1013 g cm−3 line, which closely traces the location of the overshoot region, crosses the Brunt–Väisälä frequency in close proximity to the dominant emission region, especially at t = 800 ms (middle) and t = 1000 ms (right). While our analysis suggests that the dominant source of GW emission does not stem from the convection zone itself, we cannot rule out PNS convection as a forcing mechanism that accounts for a substantial fraction of the GWs generated. In fact, we think that this is plausible and supports the findings of Andresen et al. (2017), who also find significant emission in the PNS convective overshoot region. On the other hand, considering the correlation we see between the GW amplitudes and the neutrino heating (Sections 3.1 and 3.2), as well as the noncorrelation with the total PNS convection layer kinetic energy seen in Figure 11, we do not rule out accretion plumes as a strong excitation mechanism. Furthermore, via entropy field plots we observe clear funnels of low-entropy matter (from the gain region) striking the PNS at times coinciding with some of the largest amplitude spikes in the GW signal. Perhaps these simulations serve as an example where both mechanisms are at work.
Several groups report on GW amplitudes decreasing by a factor of 10−20 when going from 2D to 3D (Andresen et al. 2017; O'Connor & Couch 2018b; Mezzacappa et al. 2020). This is generally expected since the axisymmetric assumption leads to an artificial enhancement of coherent motion. Andresen et al. (2017) gather the contributions to the GW signal from different regions, such as the convection zone plus its overshoot layer (region A in their paper) and the PNS surface layer (region B in their paper). They report on a suppression of the GW signal by a factor of ∼10 in region A when going from 2D to 3D, and a higher such factor in region B. Andresen et al. (2017) discuss why a higher suppression of GWs excited by accretion plumes, compared to overshoot from below, is expected when going from 2D to 3D. In 2D, turbulence structures cascade in reverse (Xiao et al. 2009) and the Kelvin–Helmholtz instability is suppressed at the edge of supersonic downflows (Müller 2015); this may result in artificially high accumulation of the turbulent energy on large scales and higher downflow velocities onto the PNS. Furthermore, Andresen et al. (2017) demonstrate that in 2D the frequency range of the chaotic turbulent downflows from the gain region may have a stronger overlap with the natural g-mode frequency, such that the accretion mechanism may produce more resonant excitation in 2D compared to 3D. Speculatively, then, if both the convective overshoot and the accretion mechanisms drive the GWs in our simulations, and with these effects taken into account, 3D counterparts to our models may have convective overshoot as the main forcing of PNS oscillations; however, based on Appendix B, we do not expect the radial distributions to change dramatically.
3.5. Origin of the Power Gap
We end our results section by exploring the power gap present in all of our simulations. We show the evolution of the characteristic strain for the m0.75 run in the top panel of Figure 12, where we have sequentially windowed 200 ms of the GW signal centered at the epoch we specify on the right-hand side. For a direct comparison, each but the first strain is shifted vertically using even multiplication factors on a logarithmic scale. The strains are plotted in color, with smoothed versions in black. This figure provides yet another perspective of the drift of the peak frequency corresponding to the dominant PNS oscillation mode that goes from ∼550 Hz at 280 ms to ∼1450 Hz at 880 ms. The power gap, which we mark by crosses at the local minima of the black lines, is located around 1.2 kHz and is particularly easy to see between 0.6 and 0.9 s, when modes are excited both above and below the gap. In the bottom panel, we plot the location of the minimum over many time steps for the three models varying in effective mass and for the three models varying in incompressibility modulus. Recall that m0.75 and k230 are the same, and our baseline simulation.

Figure 12. Top panel: characteristic strain (at a 10 kpc distance) calculated for seven times between 280 and 880 ms post-bounce for the m0.75 run (colored lines), with corresponding smoothed versions (black lines). We use a Hann function of 200 ms centered at each time specified, windowing only that section of the GW signal (Figure 2). Each but the first plot is shifted vertically using logarithmically even multiplication factors. This figure provides yet another perspective of the drift of the peak frequency corresponding to the dominant mode frequency. We note the large dip at ∼1.2 Hz and mark the local minimum of the smoothed functions, which corresponds to the power gap. Bottom panel: applying the same technique to all nonrotating models, we track the frequency of the power gap over many time steps spaced 20 ms apart. In the text we discuss the systematic ordering of the gap with the two EOS parameters and, in general, the central density.
Download figure:
Standard image High-resolution imageAddressing the models varying only in the effective mass first, before ∼0.3 s, the gap locations are ordered in frequency with the value of the effective mass. For m0.55 and m0.75, which share the same general gap evolution, the frequency of the gap increases until it flattens out around ∼0.4 s and stays roughly constant thereafter. The gap evolution of the m0.95 simulation differs from the others since its frequency decreases with time.
The evolution of the gap does not appear to change when varying the incompressibility modulus. However, the quantitative value of the gap frequency does. It is located at lower frequencies for progressively higher values of Ksat. Recall that the k200 and k260 simulations are only carried out until ∼600 ms after bounce.
Morozova et al. (2018) speculate that one may view the PNS as a coupled system of the inner core and the outer convectively stable shell, mediated by the PNS convection zone, such that the power gap may originate via a repelling interaction between a trapped PNS core mode and a surface layer mode. Their perturbation analysis roughly reproduces the morphology of the gap when plotting the frequency of modes after having moved the outer boundary to the core surface (their Figure 8).
The different gap frequencies (bottom panel of Figure 12) in our study further hint toward an involvement of the inner core in producing the power gap. The incompressibility modulus has only a significant effect in the core, where the density is sufficiently high and the thermal component of the EOS is less dominant (Schneider et al. 2019b). Recall that the PNS radius defined at ρ = 1011 g cm−3 and the PNS convection zone properties, which reflect the structure between ∼ 1013 and 1014 g cm−3, remain equal between the models varying in incompressibility modulus. Thus, the outer structure of the PNS alone is likely not the cause of the gap, nor does it set the frequency. However, the inner core structure may. Varying the incompressibility (effective mass) above and below baseline changes the central density by ∼4% (∼12%). Furthermore, the central density and the gap frequency share the same ordering between all the models. That is, the higher the central density, the higher the frequency of the gap. The m0.95 run is the only deviation to this trend owing to its deviation in gap morphology.
Related to the gap origin suggested by Morozova et al. (2018), other asteroseismology studies see examples of avoided crossings between modes (Torres-Forné et al. 2019b; Sotani & Takiwaki 2020). Torres-Forné et al. (2019b) introduce mode grouping/classification via the shape of the mode functions, rather than by the number of nodes. With this method, some of their earlier-predicted avoided crossings (when counting nodes) are replaced by plain crossings, shedding light on the exchange of properties when modes cross. If what we see in our simulations is an avoided crossing, perhaps like the analytical eigenmode solutions in Sotani & Takiwaki (2020), the location of the avoided crossing coincides with the gap (Figure 3). While this is likely no coincidence and would naturally explain the absence of emission in a small region in the spectrogram (where the modes interact), we have not untangled the process responsible for the power gap that persists during the entire simulation and postpone further investigation to future work. However, our preliminary perturbation analysis yields eigenmodes predicting the two main modes seen in the spectrograms and further reveals that the m0.95 model differs from the others by predicting another avoided crossing at an earlier epoch between less excited modes, a possible explanation for its unique gap morphology. From this preliminary analysis, we also see an eigenmode close to the gap whose energy is mostly confined in the inner core.
For completeness, we remark that the power gap is also evident (and marked with a black dashed line in the projected power spectral density) in the spatially decomposed spectrograms, see Figure 10 and Appendix A. Other regions lack emission too, which very roughly correspond to nodes from p-modes above the gap and g-modes below (although these are not necessarily eigenmodes but perhaps sporadic wave-like transient perturbations). These "g-mode" nodes appear to converge at the gap, which in principle could produce it.

Figure 13. Radial profiles of GW spectrograms at t = 0.4 s after bounce calculated by numerical differentiation of Izz (left panel) and dIzz /dt without the surface term (right panel).
Download figure:
Standard image High-resolution imageTo finalize our discussion of the power gap, we speculate on the reason why some investigations in the literature do not seem to show evidence for this gap (e.g., Torres-Forné et al. 2019b; Mezzacappa et al. 2020; Jardine et al. 2021). Our results and those of Morozova et al. (2018) show clear evidence that the gap is tied to the physics at the highest densities in the inner (≲10 km) core of the PNS. One potential cause for this disparity is the use of a spherical, 1D, inner core, which prevents aspherical motions, or, in this case, potential mode interactions. Morozova et al. (2018), O'Connor & Couch (2018b), Radice et al. (2019), and this work all see the power gap (or the power gap can be seen in the publicly available data) and do not have such an inner core. The one exception we can find is the work of Pan et al. (2018), who use a very similar setup to our FLASH simulations, but whose published GW spectrograms show no sign of a power gap. On the other hand, several studies see a much richer set of isolated excited modes (Torres-Forné et al. 2019b) compared to what is seen in our study. It very well could be that aspects of our numerical setup are enhancing interactions between modes (including the interaction responsible for the power gap); further work still is needed to assess the power gap.
4. Conclusions
We have presented nine axisymmetric simulations of CCSNe where we methodically vary experimentally accessible parameters in the EOS of dense nuclear matter. Our investigation focuses on the effective mass parameter m⋆ and the incompressibility parameter Ksat, allowing values of m⋆ ∈ {0.55, 0.75, 0.95} and Ksat ∈ {200, 230, 260} MeV baryon−1, which represent their estimated mean and 2σ interval. For the values of m⋆ above and below baseline, the effect of a rotating progenitor is demonstrated using central angular speeds, Ω0, of both 1 and 2 rad s−1.
In order to investigate the source of GWs and the mechanism that excites the oscillatory perturbations, we have spatially decomposed the GW emission, used linear perturbation analysis, extracted convection zone properties, and provided a thorough discussion of our results in the context of existing literature. First addressed by Morozova et al. (2018), we also report on the power gap and its EOS dependence.
We show that the dominant PNS oscillation mode is heavily dependent on the effective mass and attains a higher frequency when the effective mass parameter is increased. This is due to the more compact PNSs formed for EOSs with higher effective mass, as it affects the thermal pressure during PNS formation (Schneider et al. 2019b). As such, the neutrinosphere temperature increases with the effective mass, resulting in higher neutrino/antineutrino luminosities and mean energies, and thus more neutrino heating. Aided by hydrodynamic instabilities like the SASI and convection, this increases the violent neutrino-driven instabilities in the gain region that drive convective overshoot via accretion plumes striking the PNS. Hence, increasing the effective mass also increases the GW amplitude and the energy emitted in GWs.
When including rotation, neutrino emission decreases and the gain region is less prone to instabilities. With central angular speeds of Ω0 = 1 rad s−1, the effective mass dependence of the dominant mode frequency is still clearly present, but the GW amplitudes are muted to similar heights. For Ω0 = 2 rad s−1, although different effective mass values yield different PNS radii, any clear differences in GWs are washed out by the centrifugally stabilized gain region. These simulations illustrate how rotation affects neutrino quantities and the PNS radii nonlinearly. Further studies that allow central angular speeds to vary in value within 1−2 rad s−1 are encouraged to find a critical value, above which the details of the dominant frequency mode become nondistinguishable to observations.
The simulations where Ksat varies show no significant differences in PNS compactness, PNS convection zone properties, neutrino emission, or GW signatures. However, as changes in incompressibility can lead to very different cold NS mass–radius relationships, it may be that after a few seconds, once the star has radiated most of its binding energy away in neutrinos, some features in the GW spectra may depend on the isoscalar incompressibility Ksat or on the less constrained isovector incompressibility Ksym.
For a distance of 10 kpc, which is a relevant Galactic scale, these 2D CCSNe are detectable with the current generation of laser interferometers. However, recent CCSN studies in 3D highlight that such detections may be marginal for more realistic CCSNe (O'Connor & Couch 2018b; Mezzacappa et al. 2020; Szczepanczyk et al. 2021).
A spatial distribution of the GW emission shows that the dominant emission in our simulations stems from the convectively stable surface layer between densities of ρ = 1011 and ρ = 1013 g cm−3, with a tendency toward the convective overshoot region bordering the convection zone. The emission, which also extends into the convection zone, is in close agreement with a perturbation analysis (Appendix B) suggesting that the GW emission results from coherent quadrupolar oscillatory perturbations of the PNS.
We relay two viable excitation mechanisms of the perturbations: (1) accretion plumes onto the PNS surface layer from the post-shock region, with which we find a correlation in the GW amplitude via the neutrino heating that, together with the SASI, drives the turbulent convection (this mechanism is established in the literature; e.g., Murphy et al. 2009); and (2) overshoot into the surface layer from the convection zone below. The volume, mass, and kinetic energy inside the convection zone are effective mass dependent, but we find no apparent correlation between these properties and the GW amplitude. Since we see the signatures of overshoot via the turbulent energy flux, we cannot rule out this mechanism as a viable forcing of the perturbations, especially in light of the results of Andresen et al. (2017) and in part Mezzacappa et al. (2020). 3D studies are required to establish the potency of this mechanism, as it may be washed out by artificially strong excitation from accretion plumes in 2D.
We highlight two analytical procedures that could provide value to future studies in unveiling the mechanism and source of GWs: In Appendix A we remark that caution needs to be taken when calculating the spatial distribution of GWs utilizing the analytic expression for the first time derivative of the quadrupole moment (Equation (10) in Cartesian and Equation (A5) in spherical coordinates). In Appendix B we highlight that the location where the energy density associated with a particular mode (Morozova et al. 2018; Torres-Forné et al. 2018, 2019b; Sotani & Takiwaki 2020) is most concentrated does not necessarily overlap with the region emitting the largest contribution of GWs owing to the excitation of that mode.
Related to the origin of GWs is the presence of a narrow (Δf ∼ 50 Hz), high-frequency (∼1.2 kHz), and long-lasting region in the spectrograms that lack emission, the "power gap." We find that the frequency of the power gap changes when varying both the effective mass and the incompressibility modulus and is generally ordered by the value of the central density. This, combined with more detailed arguments (Section 3.5) and previous analysis of Morozova et al. (2018), strongly hints toward an involvement of the inner core in producing the gap. The modes in the spectrogram appear to undergo an avoided crossing at a frequency coinciding with that of the gap. This is supported by our preliminary perturbation analysis, which further indicates that the mode closest to the gap has its energy mostly confined to the inner core.
We thank Viktoriya Morozova and Michael Pajkos for in-depth discussions during the development of this work. This work is supported by the Swedish Research Council (project No. 2020-00452). The simulations were enabled by resources provided by the Swedish National Infrastructure for Computing (SNIC) at PDC and NSC partially funded by the Swedish Research Council through grant agreement No. 2016-07213.
S.M.C. is supported by the U.S. Department of Energy, Office of Science, Office of Nuclear Physics, Early Career Research Program under Award No. DE-SC0015904. This material is based on work supported by the U.S. Department of Energy, Office of Science, Office of Advanced Scientific Computing Research and Office of Nuclear Physics, Scientific Discovery through Advanced Computing (SciDAC) program under Award No. DE-SC0017955. This work was supported by the Exascale Computing Project (17-SC-20-SC), a collaborative effort of the U.S. Department of Energy Office of Science and the National Nuclear Security Administration.
Software: FLASH (Fryxell et al. 2000), NuLib (O'Connor 2015), Matplotlib (Hunter 2007), NumPy (Harris et al. 2020), SciPy (Virtanen et al. 2020), yt (Turk et al. 2011).
Appendix A: Spatial Distribution of Gravitational-wave Emission
In this appendix, we give the formulae to acquire the spatial distribution of GW emission. Below we use the spherical coordinate system (r, θ, ϕ). In axisymmetry, the mass quadrupole moment of a shell centering at r with a thickness of Δr is

where P2 is the Legendre polynomial of degree 2 and . According to Equation (11), the GW strain contributed by this shell is


In the main text, we perform numerical differentiation of Izz with respect to t twice to calculate shell contribution h+(r, t) with Δr = 1 km. The Fourier transform of h+(r, t) within a temporal window of 40 ms gives . In Figure 10 we plot the normalized power as radial profiles of the GW spectrogram.


Generally, one wants to avoid numerical differentiation to minimize numerical noise (Finn & Evans 1990). With the mass conservation equation , one can avoid the first numerical differentiation of Izz as


Partial integration is used to further avoid the spatial differentiation. For example, the radial derivative can be avoided by


Note that there is a surface term from the partial integration. This term can be ignored when calculating dIzz /dt of the whole star, because it vanishes at r = 0 and at the stellar surface where ρ = 0. However, the surface term cannot be dropped for an arbitrary mass shell. In Figure 13 we compare the spatial GW spectrogram evaluated by numerical differentiation of Izz (left panel) and dIzz /dt (right panel) calculated as


where the surface terms are ignored. Though the total GW emission is not affected owing to canceling of the surface terms (except for the noise due to numerical differentiation), the detailed spatial distribution is clearly different. This comparison shows that using Equation (A6) can lead to problematic results in the spatial contribution to GW emission, especially if Δr is small.
To explicitly show that the surface term is responsible for the differences seen in Figure 13, we show in Figure 14 a slice through Figure 13 at 750 Hz. The blue line corresponds to the left panel of Figure 13, where the GW power is determined from two numerical time derivatives of Izz (Equation (A1)). The orange line corresponds to the right panel, where, instead, one time derivative of Equation (A6) is used. Note that the orange line peaks near 20 km, while the blue line peaks near 30 km. If we explicitly include the surface term, as in Equation (A5), and do one numerical derivative, we obtain the green line, which is coincident with the blue. For completeness, we show the value of the surface term in red. The surface term is the difference of the value of r4 ρ vr at the top of the radial bin and the bottom and has the expected shape. However, we note that since our underlying computational grid is Cartesian, these spherical shell surface terms are difficult to precisely calculate with our numerical data. For the data shown here, and unlike our standard 1 km in the rest of our analysis, we take a radial bin width of ∼3 km to reduce the numerical noise associated with calculating the surface term (which is a difference of two similar numbers for small Δr) and the volume integral. For these numerical reasons, we ultimately use two numerical derivatives of Equation (A1) rather than one numerical derivative of Equation (A5; which includes the surface term) in the main part of our work.

Figure 14. Normalized power at 750 Hz for the m0.75 simulation at 0.4 s after bounce determined by various numerical methods with a radial binning of 3 km. The blue and orange curves correspond to the left and right panels of Figure 13. The blue is determined with two numerical time derivatives of Equation (A1), while the orange is via one numerical time derivative of Equation (A6). The surface term is ignored in Equation (A6); including it as in Equation (A5) gives the green line. In red we explicitly show the surface term, which can be comparable to, or larger than, the true signal for this choice of binning.
Download figure:
Standard image High-resolution imageAppendix B: Comparison between Simulation and Perturbation Analysis
We follow Westernacher-Schneider (2020) to perform a perturbation analysis that is consistent with our pseudo-Newtonian hydrodynamic simulations. Equations (3.12)–(3.15) in Westernacher-Schneider (2020) are solved with a four-stage Runge–Kutta method to get the quadrupolar (l = 2) perturbative mode functions, namely, the radial displacement ηr , tangential displacement η⊥, and density as a function of radii. Here, we do not fix the outer boundary condition to get the eigenmodes, but we set the mode frequency in the perturbative equations to be the peak GW frequency and acquire the corresponding mode functions for the background fluid at a specific time. The perturbative quadrupole moment responsible for GW emission is


In the top panel of Figure 15 we compare the radial profiles of GW emission ( in Appendix A) in the simulations with from the perturbation analysis, where a multiplication constant C is used to match the maxima between them. Agreement is found inside the PNS (ρ ≥ 1011 g cm−3), suggesting that GW emission results from the coherent quadrupolar oscillations of the entire PNS. In the bottom panel of Figure 15 we plot the radial profiles of the kinetic energy density of the perturbative mode as (Equation (59) in Torres-Forné et al. 2019b)



where l = 2. Similar to Torres-Forné et al. (2019b) and Morozova et al. (2018), the kinetic energy density has its maximum inside the inner core (∼10 km). However, the kinetic energy that has an r2 from the volume dV resembles the distribution of GW emission (except for the leakage to outside PNS at tpb = 800 ms). We assert from this that using the energy density alone to quantify the location of GW emission is inappropriate. Details on the perturbation analysis such as eigenmodes analysis are still under investigation and will be described elsewhere.

Figure 15. Comparison between perturbation analysis and simulations with m⋆ = 0.75, for GW peak frequencies at t = 400, 800, and 1000 ms after bounce, from left to right. Top panel: simulation is described in Appendix A, and perturbation is in Equation (B1). Bottom panel: solid line is Ekin in Equation (B2), and dashed line is scaled r2 Ekin. Vertical black dashed lines in each panel are locations of ρ = 2 × 1014, 1013, and 1011 g cm−3, from left to right.


Download figure:
Standard image High-resolution imageFootnotes
- 5
Because we use a parameterized approach to the EOS, we do not explicitly include heavy leptons, hyperons, meson condensates, and quark-gluon plasmas, all of which may appear at high densities and/or temperatures and alter the EOS.
- 6
The small difference between and is due to the small neutron–proton mass difference.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}